论文笔记之:Playing Atari with Deep Reinforcement Learning
Playing Atari with Deep Reinforcement Learning
《Computer Science》, 2013
Abstract:
本文提出了一种深度学习方法,利用强化学习的方法,直接从高维的感知输入中学习控制策略。模型是一个卷积神经网络,利用 Q-learning的一个变种来进行训练,输入是原始像素,输出是预测将来的奖励的 value function。将此方法应用到 Atari 2600 games 上来,进行测试,发现在所有游戏中都比之前的方法有效,甚至在其中3个游戏中超过了一个人类玩家的水平。
Introduction:
从高维感知输入中学习控制agents,像视觉或者speech 是强化学习中一个长期的挑战。大部分成功的涉及到这几个领域的 RL 应用都依赖于手工设计的feature 和 线性策略函数或者策略表示的组合。明显,这种系统的性能严重的依赖于特征表示的质量。
最近深度学习的发展,对于从原始感知数据中提取高层feature 称为可能,并且在计算机视觉和语音识别上面取得了很大的进展。这些方法利用神经网络结构,包括 神经网络,多层感知机,RBM 和 RNN,已经涉及到监督学习和非监督学习领域。大家很自然的就会问,是否可以利用相似的技术来解决 RL 中感知数据的问题。
然而, RL 从深度学习的角度,体现了几个挑战:
首先,大部分成功的 深度学习算法都依赖于海量标注的数据, RL 算法,从另一个角度,必须从一个变换的奖励信号中进行学习,而且这种信号还经常是稀疏的,有噪声的,且是延迟的。动作 和 导致的奖励 之间的延迟,可能有几千步那么长,看起来在监督学习中,当直接将输入和目标联系起来非常吓人。
另一个问题是,大部分深度学习算法都假设 data samples 是相互独立的,然而, RL 经常遇到 高度相关的状态。
此外,在 RL 中数据分布随着算法学习到新的行为而改变,这对于深度学习假设固定的潜在分布是有问题的。
这篇文章表明,一个 CNN 可以克服这些挑战,并且在复杂的 RL 环境下从原始视频数据中学习到控制策略。该网络是用变种的 Q-learning 算法训练的,利用 SGD 来更新权重。为了降低相关数据和非静态分布的问题,我们使用了一种 经验重播机制 (experience replay mechanism),该机制随机的采样之前的转换,所以就在许多过去的行为上平滑了训练分布。
Background:
我们考虑到 agent 和 环境交互,即:Atari emulator,是一个动作,观察 和 奖励的序列。在每一个时间步骤,agent 选择一个动作 $a_t$ 从合法的动作集合 $\mathcal{A} = {1, 2, ..., K}$. 该动作被传递到模拟器,然后修改其初始状态和游戏得分。总的来说 环境可能是随机的。模拟器的中间状态, agent 是无法看到的;但是 agent 可以观察到一张图像 xt,由原始像素值构成的表示当前屏幕的向量。此外,他也接收到表示游戏得分的奖励 rt。注意到,总的来说,游戏得分依赖于动作和观察的整个序列;关于一个动作的反馈可能得在几千次时间步骤上才能收到。
由于该 agent 仅仅观察到当前屏幕的图像,所以任务是部分观察到的,许多模拟器状态是感官上有锯齿的,即:仅仅从当前的屏幕,无法完全理解当前的情形。我们所以就考虑 动作和观察的序列, $s_t = x_1, a_1, x_2, ... , a_{t-1}$,然后依赖于这些序列去学习游戏策略。模拟器中的序列都认为会在有限的时间步骤内结束。这就是说在每一个序列,一个large 但是有限的 MDP 是一个清楚的状态。结果,我们采用标准的 RL 方法来处理 MDPs,利用完整的序列 $s_t$ 作为时刻 t 的状态表示。
agent的目标是和模拟器交互,然后选择动作,使得将来的奖励最大化。我们做出假设,即:将来的奖励每一个时间步骤都会打一个折扣 $\gamma$,定义将来的时刻 t 的折扣 return 为:

我们定义一个最优 动作-值函数 $Q^*(s, a)$ 作为采用任何策略后最大期望 return,在看了一些序列 s 然后采取了一些动作 a,
$Q^*(s, a) = max_{\pi} E [R_t|s_t = s, a_t = a, \pi]$,其中,$\pi$ 是一个从序列到动作的映射。
最优的动作值函数 服从一个重要的等式,叫做:Bellman equation. 这个基于如下的观察:如果下一个时间步骤的序列 s'的 最优值 Q^*(s', a') 对于所有可能的动作 a' 都是已知的,然后最优策略就是选择动作 a' 使得期望值 $r + \gamma Q^*(s', a')$最大化:

许多强化学习算法背后基本的 idea 是预测 the action-value function,利用 Bellman equation 作为一次迭代更新,
$Q_{i+1}(s, a) = E[ r + \gamma_{a'} Q_i(s, a) ]$.
如此 value iteration 算法收敛到一个最优的 动作值函数,$Q_i -> Q^*$。
实际上,这个基础的方法是完全不实用的,因为:动作值函数是对每一个序列分别预测的,而没有任何泛化。(the action-value function is estimated separately for each sequence, without any generalisation.) 相反,实用 function approximator 去预测 action-value function的值确实很常见的,即:
$Q(s, a; \theta) = Q^*(s, a)$
在强化学习领域,这通常是一个线性函数,但是有时候非线性函数估计也用,如:神经网络。我们将带有权重的神经网络函数记为:Q-network。一个Q-network 可以通过一个序列的损失函数 $L_i(\theta_i)$ 最小化来实现每一次迭代 i 的改变。
其中, 是第i次迭代的目标,也就是当做 label 来用。当优化损失函数 $L_i(\theta_i)$,前一次迭代的参数固定。注意到,target 依赖于网络的权重,这是和监督学习当中的 target对比而来的,在学习开始之前是固定的。区分开损失函数与对应的权重,我们得到如下的梯度:
是第i次迭代的目标,也就是当做 label 来用。当优化损失函数 $L_i(\theta_i)$,前一次迭代的参数固定。注意到,target 依赖于网络的权重,这是和监督学习当中的 target对比而来的,在学习开始之前是固定的。区分开损失函数与对应的权重,我们得到如下的梯度:
不是在上述梯度中,计算全部的期望,比较适合的方法是利用 SGD 的方法来优化损失函数。If the weights are updated after every time-step, and the expectations are replaced by single samples from the behaviour distribution and the emulator, respectively, then we arrive at the familiar Q-learning algorithm.
注意到,该算法是 "model-free"的,即:直接从模拟器中利用采样,解决了 RL 学习任务,而没有显示的构建 estimate。本算法也是“off-policy”的,即:学习贪婪策略 $a = max_a Q(s, a; \theta)$,服从一个行为分布,确保状态空间的足够探索。实际上,行为分布经常被贪婪策略选择,有 1-x 的概率进行探索,以 x 的概率随机选择一个动作。
Deep Reinforcement Learning
最近在计算机视觉和语音识别领域的突破,主要依赖于有效的深度学习在海量训练数据上的学习。最成功的方法是直接从原始输入上进行训练,基于 SGD 进行权重更新。通过喂养深度神经网络足够的数据,通常可以学习到比手工设计特征要好得多的特征表达(feature representation)。这些成功激发了我们在 RL 相关的工作。我们的目标是将 RL 算法和深度神经网络进行联系,也是直接处理 RGB 图像,并且利用 随机梯度更新来有效的处理训练数据。
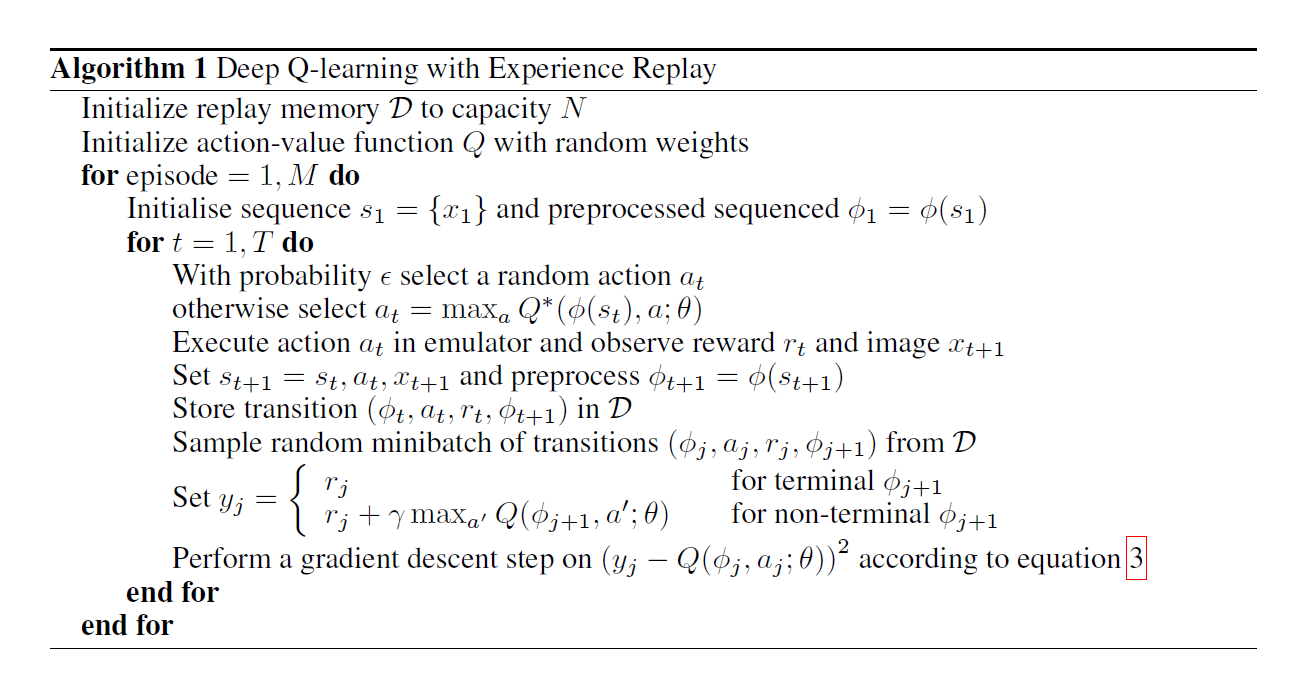
和 TD-Gammon 以及类似的 online方法相对,我们利用一种称为 experience replay 的技术,我们将 agent 每一个时间步骤的经验存储起来,$e_t = (s_t, a_t, r_t, s_{t+1})$,将许多 episodes 存储进一个 replay memory。在算法内部循环中,我们采用 Q-learning 更新,或者 minibatch updates,来采样 experience,从存储的样本中随机的提取。在执行 experience replay之后,agent 根据贪婪算法,选择并且执行一个动作。由于采用任意长度的 histories 作为神经网络的输入是非常困难的,我们的 Q-function 作用在由函数作用之后,固定长度表示的 histories。算法的全称,我们称为 Deep Q-learning。
该算法与传统的 Q-learning 相比,有以下几个优势:
首先,experience 的每一个步骤都在权重更新上有潜在的应用,可以允许更好的数据效率。
第二,从连续的样本上直接进行学习是 inefficient的,由于样本之间较强的相关性;随机提取这些样本,就打算了他们之间的联系,所以减少了更新的方差。
第三,当学习 on-policy 的时候,当前参数决定了下一个数据样本( when learning on-policy the current parameters determine the next data sample that the parameters are trained on)。例如,如果最大值动作是向左移动,那么训练样本就主要由左侧的样本构成;如果最大化动作是向右移动,然后训练分布也随之改变。It is easy to see how unwanted feedback loops may arise and the parameters could get stuck in a poor local minimum, or even diverge catastrophically. 通过利用 experience replay,行为分布就在之前许多状态上取了平均,使得学习更加平滑,而不至于震荡或者不收敛的情况。
在我们的方法之中,我们的算法仅仅存储最近 N 个 experience tuples,当执行更新的时候,随机的从 D 上均匀的采样。
数据的预处理,就是对输入的图像进行降分辨率等相关处理,使得尽可能的减少计算量。
模型的结构主要是:2层卷积层,后面接2层全连接层,输出是 动作空间,即:所有的可能要采取的动作。
算法的流程如下图所示:
实验部分:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号