论文笔记之:Learning Multi-Domain Convolutional Neural Networks for Visual Tracking
Learning Multi-Domain Convolutional Neural Networks for Visual Tracking
CVPR 2016
Project page: http://cvlab.postech.ac.kr/research/mdnet/
Paper: https://arxiv.org/abs/1510.07945
PyTorch Code: https://github.com/HyeonseobNam/py-MDNet
Matlab Code: https://github.com/HyeonseobNam/MDNet
本文提出了一种新的CNN 框架来处理跟踪问题。众所周知,CNN在很多视觉领域都是如鱼得水,唯独目标跟踪显得有点“慢热”,这主要是因为CNN的训练需要海量数据,纵然是在ImageNet 数据集上微调后的model 仍然不足以很好的表达要跟踪地物体,因为Tracking问题的特殊性,至于怎么特殊的,且听细细道来。
目标跟踪之所以很少被 CNN “攻占”,主要是因为很难收集海量的训练数据;此外,基于传统方法以及手工设计的特征的确也取得了不错的效果。最近的基于CNN的网络设计来解决跟踪问题,主要是在大型分类数据集上进行预训练,如:imageNet,然后将其 transfer 到跟踪问题上来。尽管也取得了明显的提升,但是仍然效果不是非常明显,因为 分类问题 和 跟踪地定位问题 本来就是两个区别很明显的问题,即:
预测物体的标签 VS 定位任意的目标
为了更好的探索 CNN 在 visual tracking上的表达能力,很有必要在大型数据上进行 visual tracking 的训练,涉及到广泛的目标和背景的组合。然而,基于视频序列的确是具有挑战性,因为其不同的特性。注意到,不同的序列涉及到目标物体具有不同的类别标签、移动模式以及外形,跟踪算法在每一个特定序列上的挑战也不同,例如:遮挡,变形,轻度光照变化,运动模糊等等。训练 CNNs 也是非常困难的,因为有些物体有时候被当做前景,有时候被当做背景,因为不同的视频中的需要。由于序列中的变化和不一致性,我们相信基于标准的分类任务的普通学习算法是不适合的,其他的方法来捕获和序列无关的信息应该能提供更好的表达。
基于此事实,我们提出了一种新颖的 CNN 结构,即: Multi-Domain Network (MDNet),从多个标注的视频序列中,来学习物体的共享的表示,协助进行跟踪,其中每一个视频看做是一个单独的 domain。所提出的网络具有单独的分支,即: domain-specific layers for binary classification. MDNet 上的每一个 domain 都是单独训练的,并且每次都迭代的更新共享层。利用该策略,我们从 domain-specific 得到依赖于 domain 的信息,学习普遍的特征表示用来跟踪。另一个有意思的方面是,我们的 CNN 是非常“浅”的,只有 3层 Conv 和 2层 fc。
本文的测试和训练的网络结构,不同的地方在于:测试的时候将最后的多个 fc,换为一个 fc,用来计算最终的目标得分。新的分类层和fc层然后在跟踪地过程中在线的继续微调,来适应新的domain。Online的更新是为了建模 long-term 和 short-term 的表观变化 ( appearance model ),分别是为了得到更好的 robustness 和 adaptiveness 。在进行学习的过程中,采用了 hard negative mining techique。
我们的算法由多个 multi-domain representation learning and online visual tracking 构成。文章主要的贡献可以列为如下三点:
1. 我们提出了一个基于CNN的 multi-domain 的学习框架,从 domain-specific 中分离出 domain-independent 的信息,来得到共享的表示。
2. 我们的框架成功的应用于 visual tracking,multi-domain pretrained 的 CNN 在新的序列中 online的进行更新来自适应的学习特定领域的信息。
3. 在两个公共数据集 Object Tracking Benchmark 和 VOT2014上面得到了充分的验证,精度达到 90+%。
本文的网络结构如下所示:

3. Multi-Domain Network (MDNet)
3.1. Network Architecture
结构如上图所示,再次就不再赘述了。
文中给出了关于为何采用“浅”的网络的解释:
1. 跟踪问题只是需要分辨出前景和背景,即:目标物体和背景,比起庞大的分类 ImageNet 1k类分类问题,还是算比较简单地;
2. 一个 deep 的 CNN 对于准确的进行物体定位是 less effective 的,由于空间信息随着网络深度的加深,变得稀释了;
3. 由于跟踪过程中的物体通常比较小,不过文中说:it is desirable to make input size small, which reduces the depth of the network natually。 对此我不觉得这个解释很合理,因为目标物体本来就很小了,那么适当的将输入放大,不是更加有利于进行特征表达吗 ? 反而再去使得 input 变小,这不太合理吧 ?
4. 最后就是,一个小的网络在跟踪问题上更加有效。作者说测试了深的网络,但是效果不好,且速度很慢。
3.2. Learning Algorithm
我们的学习算法的目标是训练一个 multi-domain CNN 以在任何 domain 辨别 target 和 background。但是这并非很直观,因为来源不同 domain的 train data 拥有不同的 target 和 background 的定义。但是,这其中仍然存在着一些共同的属性,如:对光照变化,运动模糊,尺寸变化的鲁棒性等等。为了提取出满足上述属性的特征,我们通过 multi-domain learning framework,从 domain-specific 的信息中分离出 domain-independent 的信息。
4. Online Tracking using MDNet
4.1 Tracking Control and Network Update
我们考虑两个互补的方面,即:robustness 和 adaptiveness。Long-term update 是按照常规间隔后进行更新;short-term updates 当出现潜在的跟踪失败的时候进行更新,此处潜在的跟踪失败是指:预测目标的positive score 小于 0.5。在跟踪的过程当中,我们保持一个单独的网络,这两种更新的执行依赖于物体外观变化的速度。
为了预测每一帧目标的状态,在前一帧物体的周围提取 N 个模板,然后根据网络得到他们的得分,即:正样本的得分 以及 负样本的得分。通过找到最大正样本得分作为最优的目标状态:

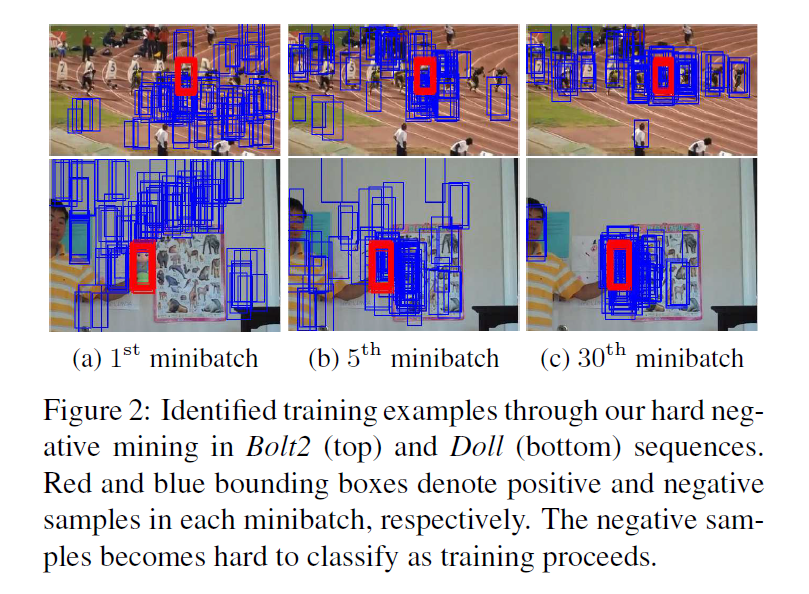
4.2 Hard Minibatch Mining
4.3 Bounding Box Regression
由于高层基于cnn的特征提取以及我们的数据增强策略,即:从目标周围提取多个正样本,导致有时候本文的方法并不能紧紧地框住目标区域。所以,此处采用了 bounding box regression technique,这个广泛的应用于 Object detection,来改善定位的准确度。
给定测试视频的第一帧,我们训练一个简单地线性回归模型来预测目标物体的位置,用的是 Conv 3 的特征。在随后的视频帧中,如果预测的目标是可靠的,那么我们可以调整从公式 1 中得到的目标位置。文章仅仅用第一帧进行 bounding box regressor 的预测,因为这非常耗时,并且增量学习并不一定有用考虑到其 risk。
4.4. Implementation Details
我们跟踪算法的整个流程在算法1 中展示了。第 j 层的 CNN filter weights 记做为 $w_j$,其中,$w_{1:5}$是由 multi-domain learning 预训练而来,$w_6$ 是随机初始化的。

具体训练方面的东西就不讲了,看看原文吧,如果感兴趣的话。
Experiments:








 浙公网安备 33010602011771号
浙公网安备 33010602011771号