Representation Learning for Event-based Visuomotor Policies
Representation Learning for Event-based Visuomotor Policies
2021-08-30 10:15:07
Paper: https://arxiv.org/pdf/2103.00806.pdf
Code: https://github.com/microsoft/event-vae-rl
1. Background and Motivation:
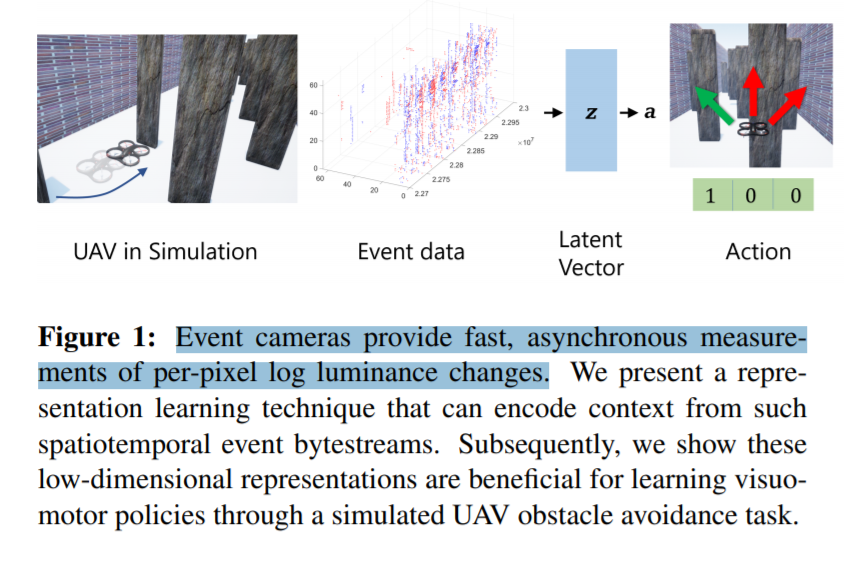
本文提出一种新的 event data 表达方法,进行 UAV 的自主避障。
如下图所示,作者不对 event data 进行预处理(如转为 event image 的方式),而是采用类似 pointnet 或者 eventnet 类似的方式,直接用 MLP 来处理 event 原始数据,即:[time, x, y, p]。受到 Transformer 结构的启发,作者将 temporal embedding 引入到这个框架中,对给定的 event sets 中的时间戳进行归一化,即 0-1. 然后这个归一化的 temporal feature 将会与其对应的特征进行相加处理。
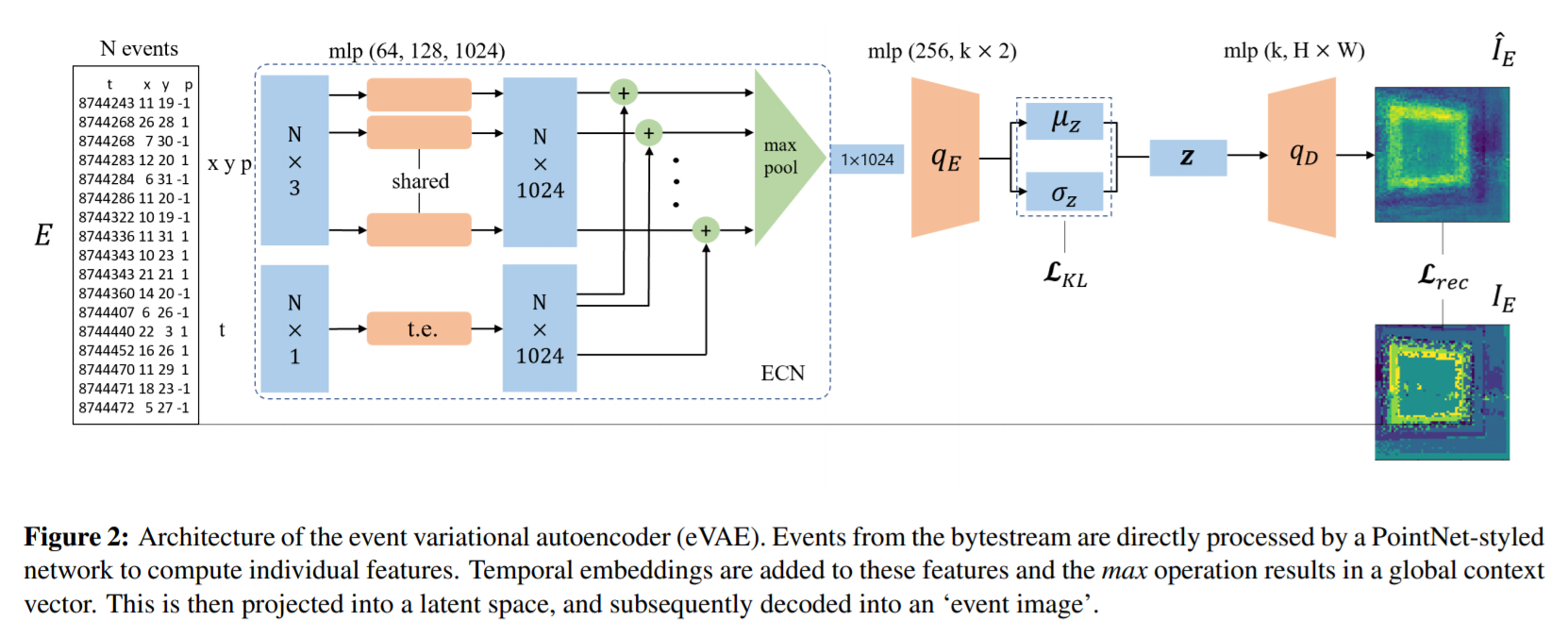
作者将对 time 和 (x, y, p) 处理的网络结构统称为 ECN,Event Context Network。然后用 max pool 进行降维处理,得到统一的 1024-D 的特征。作者将该特征输入到 VAE 模型中,进行图像的重构。此处用到了 VAE 默认的 KL 散度损失函数 和 MSE 重构损失。
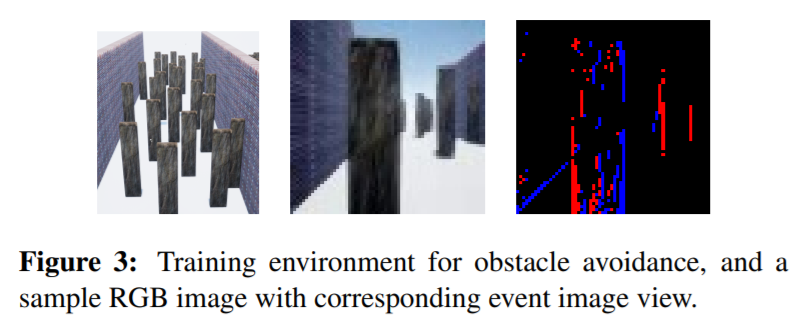
为了验证该数据表达的有效性,作者将其结合到 UAV 导航的任务中。然后利用 PPO 进行 agent 的训练。
2. Experimental Results:
Stay Hungry,Stay Foolish ...

 浙公网安备 33010602011771号
浙公网安备 33010602011771号