Real-time ‘Actor-Critic’ Tracking
Real-time ‘Actor-Critic’ Tracking
2019-07-15 10:49:16
Code: https://github.com/bychen515/ACT
1. Background and Motivation:
本文提出一种利用 “连续” 动作空间的强化学习算法来进行跟踪。之前的 MDNET 是随机采样,然后进行打分的;而 ADNet 是 “离散”的动作选择,即:通过一系列离散的动作选择,实现 BBox 的移动,来完成跟踪。下图展示了本文方法与这两种方法的不同:
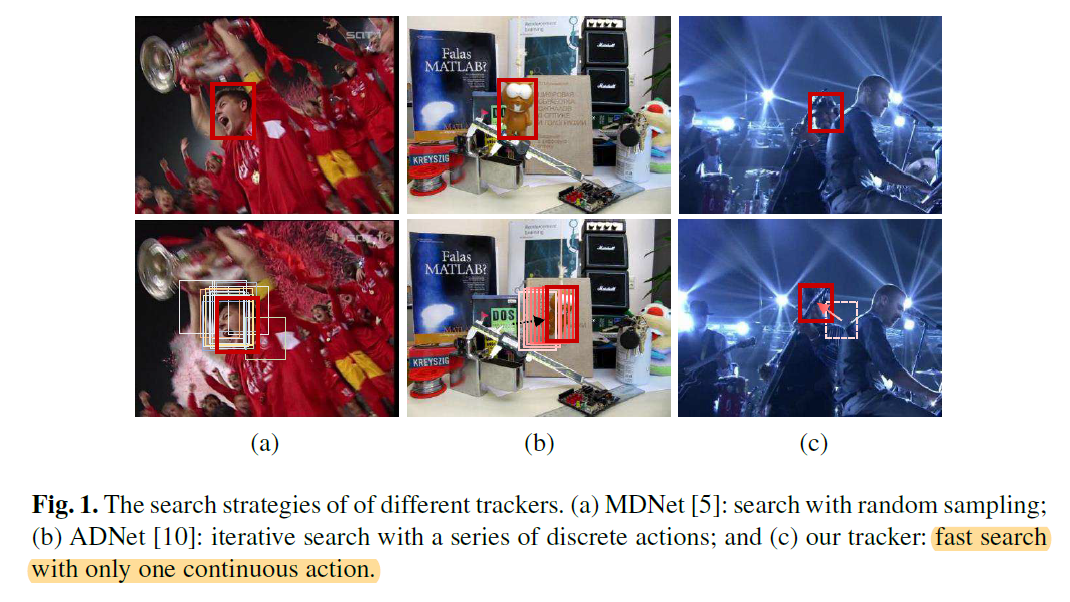
本文的贡献点在于:
1). 该算法是首次探索了连续的动作 (continuous actions) 进行跟踪,仅通过 Actor model 进行一次动作选择,即可完成动作的定位;
2). 该算法也是首次利用 “Actor-Critic” 跟踪框架。
3). 在速度达到实时的同时,精度也比不错。
2. Tracking via the "Actor-Critic" Network:
2.1 Problem Settings:
本文将跟踪问题看做是序列决策问题(Decision-making problem)。基础的马尔科夫决策过程包括如下几个元素:State,Action,State transition functions,Reward。
在本文中,tracker 被当做是 agent,并且来预测每一帧目标物体的准确位置。该智能体与环境进行交互,通过观察 s,执行动作 a,并且得到奖励 r。在第 t 帧中,智能体根据当前的状态 s,给出了连续的动作 a,得到了跟踪结果 s'。动作 a 被定义为:the relative motion of the tracked object,表明在当前帧,应该怎么直接移动 BBOX。与 ADNET 不同的是,该算法仅仅执行一个连续的动作,来定位目标物体,使得该算法更加高效。具体各个元素的定义如下:
State:
在该工作中,作者定义状态 s 为:在BBox内部的观察到的图像块。给定视频帧 F 和 BBox b = [x, y, h, w],作者首先用预处理函数 s 来处理得到该图像块。
Action and State Transition:
为了进行连续的控制,动作空间被假设为连续的,即:如何直接移动该 BBox。此处,作者用 $a = [\Delta x, \Delta y, \Delta s]$ 来描绘跟踪物体的相对运动,$\Delta x, \Delta y$ 表明了物体水平和竖直方向的变换,$\Delta s$ 表明了尺寸的相对变换。考虑到跟踪物体时序上的连续性,作者加了如下的约束来控制 BBox 的变化幅度:$-1 <= \Delta x <= 1, -1 <= \Delta y <= 1, -0.05 <= \Delta s <= 0.05$。通过对上一帧的 BBox 进行这样动作的变换,可以得到一个新的 BBox b' = [x' y' h' w']:
然后,状态转移过程 $s' = f(s, a)$ 可以隐式的通过预处理函数来实现。
Reward:
奖励函数 r(s, a) 描述了定位的准确性,所以,其可以按照重合度的方法进行度量:

每次执行一个 action,都会产生一个奖励,然后被用于离线训练的深度网络更新 (to update the deep networks in offline learning)。
2.2 Offline Training:
Network Architecture:
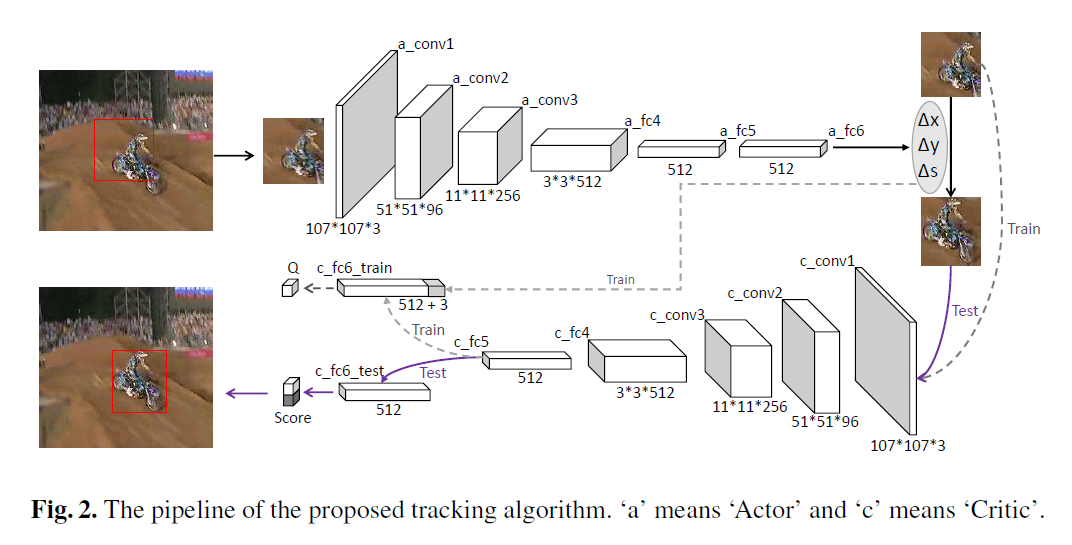
本文的网络结构如上图所示。可以看到 Actor network 是将上一帧的跟踪结果的 image patch 作为输入,输出是三维的数字,即对应了 水平,竖直 和 尺寸上的变换。在 offline training中,还有一个是 Critic network,该网络的结构跟 Actor 类似,但是用途是不同的。该网络要求的输入是:根据当前的状态,将三维 action vector 组合后的结果,以得到 Q-value,并用于动作的评价。
Training via DDPG:
本文采用 DDPG 方法来训练该 “Actor-Critic Network”,核心的思想是:迭代的训练 “Critic” 和 “Actor” 模型。给定 N 个经验 (si, ai, ri, si'),Critic model 可以利用贝尔曼方程来进行学习。通过目标网络,学习可以通过最小化下面的损失来实现:

然后,Actor 模型可以通过链式法则进行更新:

在训练迭代中,作者随机的选择一个训练序列及其 GT。在此之后,作者将跟踪器在选择的序列上得到了训练 pair (st, at, rt, st') 。

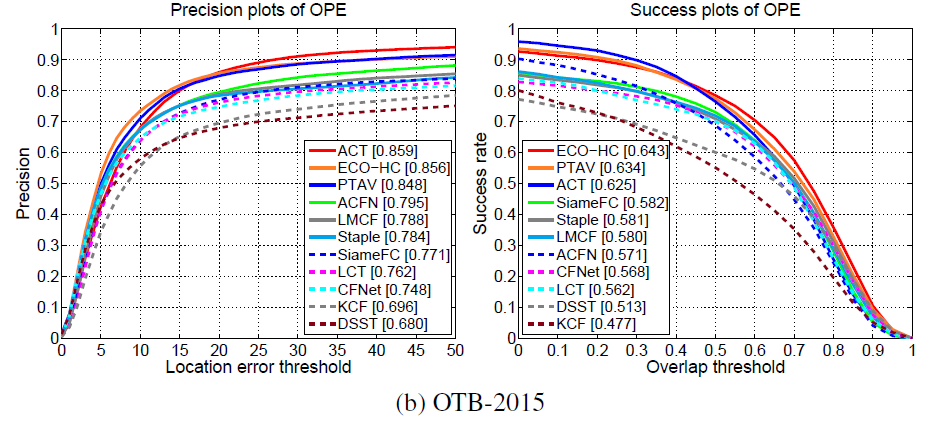
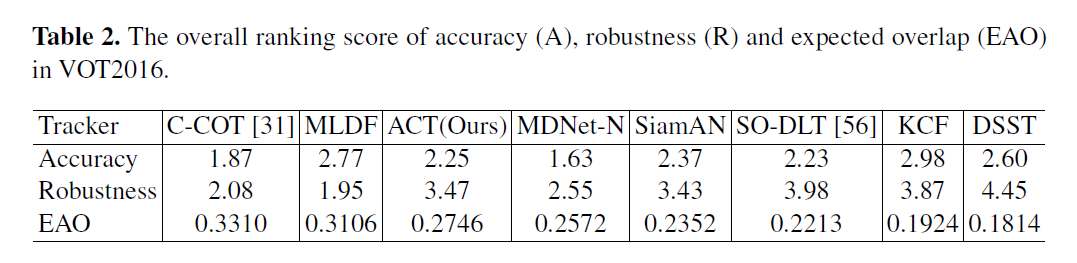
Experimental Results:
==

 浙公网安备 33010602011771号
浙公网安备 33010602011771号