Generalized Intersection over Union: A Metric and A Loss for Bounding Box Regression
Generalized Intersection over Union: A Metric and A Loss for Bounding Box Regression
2019-05-20 19:34:55
Paper: https://arxiv.org/pdf/1902.09630.pdf
Project page: https://giou.stanford.edu/
Code: https://github.com/generalized-iou
1. Background and Motivation:
IoU (Intersection over Union) 是物体检测领域最常用的评价指标,用于衡量任意两个形状之间的相似性。IoU 将物体的形状信息,如:width,height,and locations of two bounding boxes,编码为 region property,然后计算一个聚焦于该区域的度量。这个性质使得 IoU 对 scale 有不变性。由于具有这样的特点,IoU 被广泛的应用于物体检测,分割,跟踪等任务。
从上述内容可以发现,最小化常用的损失 与 改善他们的 IoU 值,之间并没有强烈的关系。如图 1(a)所示:(绿色的BBox 为真值,黑色的为预测的结果)

为了简化起见,我们假设两个 BBox 的一个角固定,所以,任何预测的 BBox,只要第二个角在圆周线上,将会产生相同的 l2-norm distance;然而,IoU值却明显的不同。可以发现,regression loss 的优化 和 IoU values 之间的 gap,并不能很简单的跨越。
本文针对该问题,探索了 IoU 的新的计算方法。作者这里借鉴了 UnitBox 的思想,直接将 BBox 作为优化目标进行回归。所以,将 IoU 作为 2D 物体检测任务的目标函数就更适合了。但是,IoU 作为 metric 和 loss 有如下的不足:如果两个物体根本没有重合,那么 IoU value 将会是 0,并且不会反应两个 BBox 到底有多远。在这种不重合的情况下,如果用了 IoU 作为损失函数,那么梯度将会为 0,无法进行优化。
在本文中,作者通过解决这个不重合的问题,克服了 IoU 的弱点。作者确保其拓展版本的有如下的特性:
a). 与 IoU 一样,拥有相同的定义,即:将对比物体的形状属性编码为区域属性(region property);
b). 保持了 IoU 的尺寸不变性;
c). 确保了在重合物体上与 IoU 的强烈相关性;
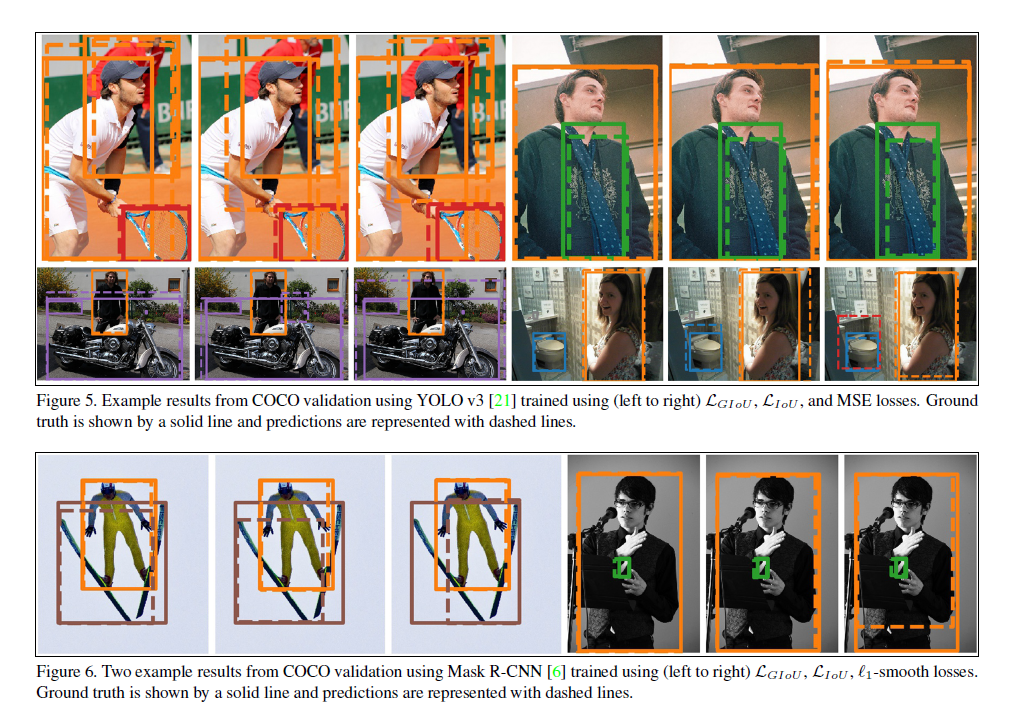
我们引入该 generalized verison of IoU, named GIoU, 作为一种新的对比方式。也提供了一种分析性的方案,来计算 GIoU,允许其作为 loss function。将 GIoU loss 引入到顶尖的物体检测算法中,我们的方法稳定的提升了其在主流物体检测benchmark 上检测性能。
2. Generalized Intersection over Union :
常规的 IoU 的定义如下:
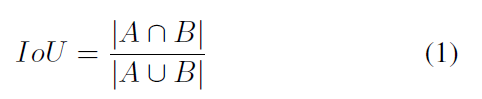
IoU 有如下的两个优势:
1). IoU 作为距离,可以看做是一种 metric;
2). IoU 对问题的尺寸具有不变性(Invariant to the scale of the problem);
与此同时,也有如下的一个劣势:如果两个 BBox 不重合,那么其 IoU 得分就是 0。那么,此时的 IoU 无法反映出两个BBox 真实的距离。

作者提出的 GIoU 可以很好的解决这个问题,具体的计算方式如下:
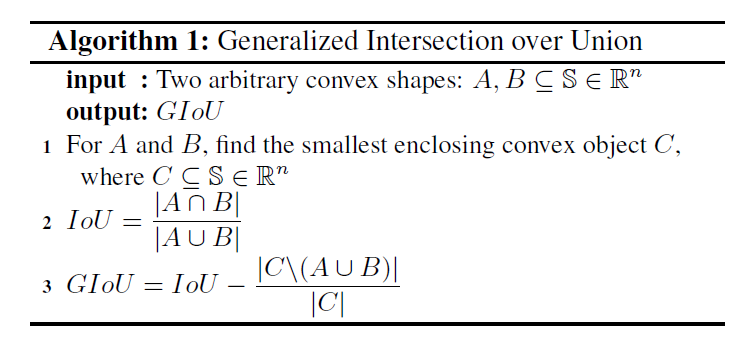


首先,计算两个 BBox A 和 B 的 smallest convex shapes C, 同时包含 A and B;
然后,我们计算如下的比值:分子是 排除 A 和 B 后的 C的区域,分母是 C 的总面积;这个表达了 A 和 B 之间的空闲区域的大小比例;
最终,将 IoU 的值,减去上述的比值,就可以得到 GIoU 的值。
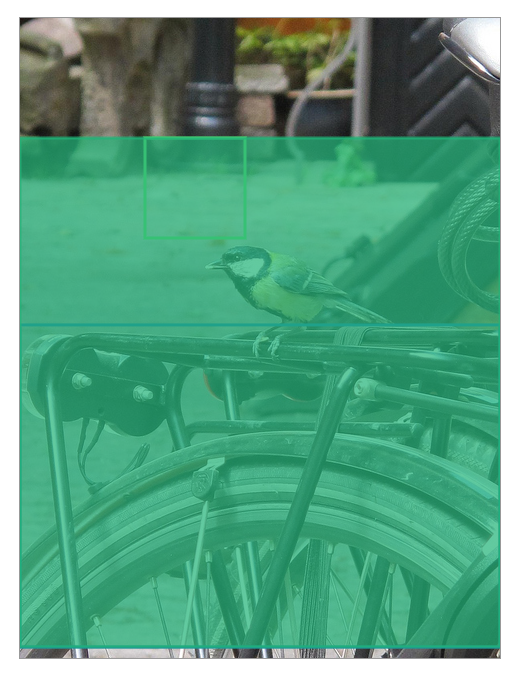
上图中的绿色区域,即展示了所要计算的区域 C 的面积。
3. Experiments:

==== Core Code:
def bbox_transform(deltas, weights): wx, wy, ww, wh = weights dx = deltas[:, 0::4] / wx dy = deltas[:, 1::4] / wy dw = deltas[:, 2::4] / ww dh = deltas[:, 3::4] / wh dw = torch.clamp(dw, max=cfg.BBOX_XFORM_CLIP) dh = torch.clamp(dh, max=cfg.BBOX_XFORM_CLIP) pred_ctr_x = dx pred_ctr_y = dy pred_w = torch.exp(dw) pred_h = torch.exp(dh) x1 = pred_ctr_x - 0.5 * pred_w y1 = pred_ctr_y - 0.5 * pred_h x2 = pred_ctr_x + 0.5 * pred_w y2 = pred_ctr_y + 0.5 * pred_h return x1.view(-1), y1.view(-1), x2.view(-1), y2.view(-1) def compute_iou(output, target, bbox_inside_weights, bbox_outside_weights, transform_weights=None, batch_size=None):
## the output is predicted bounding box, the target is ground truth bbox. (you need to transform them into tensor, when use this function) if transform_weights is None: transform_weights = (1., 1., 1., 1.) if batch_size is None: batch_size = output.size(0) x1, y1, x2, y2 = bbox_transform(output, transform_weights) x1g, y1g, x2g, y2g = bbox_transform(target, transform_weights) x2 = torch.max(x1, x2) y2 = torch.max(y1, y2) xkis1 = torch.max(x1, x1g) ykis1 = torch.max(y1, y1g) xkis2 = torch.min(x2, x2g) ykis2 = torch.min(y2, y2g) xc1 = torch.min(x1, x1g) yc1 = torch.min(y1, y1g) xc2 = torch.max(x2, x2g) yc2 = torch.max(y2, y2g) intsctk = torch.zeros(x1.size()).to(output) mask = (ykis2 > ykis1) * (xkis2 > xkis1) intsctk[mask] = (xkis2[mask] - xkis1[mask]) * (ykis2[mask] - ykis1[mask]) unionk = (x2 - x1) * (y2 - y1) + (x2g - x1g) * (y2g - y1g) - intsctk + 1e-7 iouk = intsctk / unionk area_c = (xc2 - xc1) * (yc2 - yc1) + 1e-7 miouk = iouk - ((area_c - unionk) / area_c) iou_weights = bbox_inside_weights.view(-1, 4).mean(1) * bbox_outside_weights.view(-1, 4).mean(1) iouk = ((1 - iouk) * iou_weights).sum(0) / batch_size miouk = ((1 - miouk) * iou_weights).sum(0) / batch_size return iouk, miouk ## the iouk is regular IoU value, the miouk is the GIoU value.

 浙公网安备 33010602011771号
浙公网安备 33010602011771号