论文笔记:Fast Online Object Tracking and Segmentation: A Unifying Approach
Fast Online Object Tracking and Segmentation: A Unifying Approach
CVPR-2019
2019-03-11 23:45:12
Paper:https://arxiv.org/pdf/1812.05050
Project Page: http://www.robots.ox.ac.uk/~qwang/SiamMask/
Code:https://github.com/foolwood/SiamMask
Blog:https://zhuanlan.zhihu.com/p/58154634
Demo Video: https://www.youtube.com/watch?v=I_iOVrcpEBw&feature=youtu.be
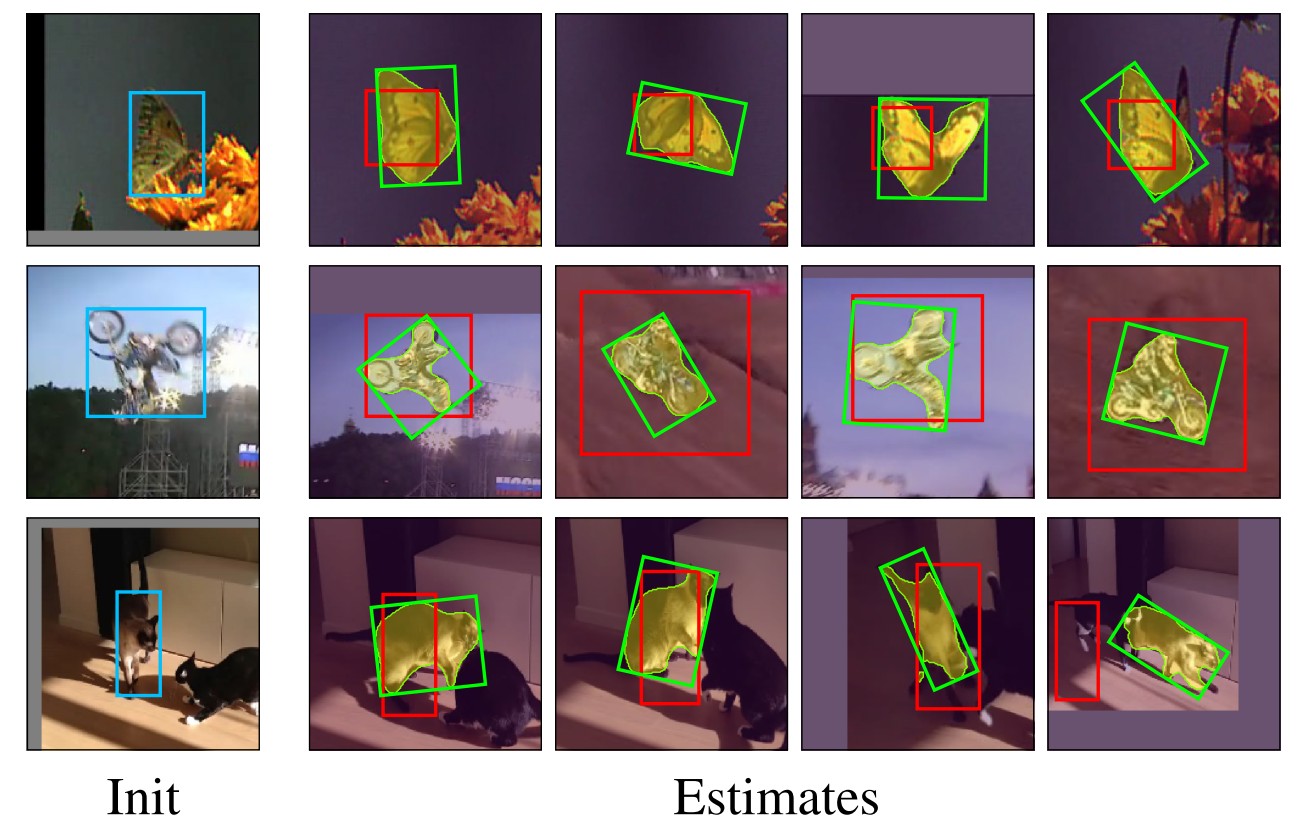
这篇博文主要从 Tracking 的角度来看待这个跟踪算法,具体分割算法请参考原文。本文提出一种多任务框架,来实现同时跟踪与分割,初步探索了目标的表达对跟踪结果的影响。具体效果如下图所示:
究其根本,就是在想怎么用更好的 Bounding Box 框柱物体,以适应物体的形变等导致的跟踪不准确的问题。当上一帧的跟踪结果靠谱时,那么当前帧就可以进行很好的采样,跟踪。作者在 Siamese Net based tracker 的基础上,进一步引入 Mask branch,得到分割结果。然后在此基础上,进行跟踪。这一步,其实相当于一定程度上解决了目标尺度变化的问题。其跟踪框架的大致流程如下所示:
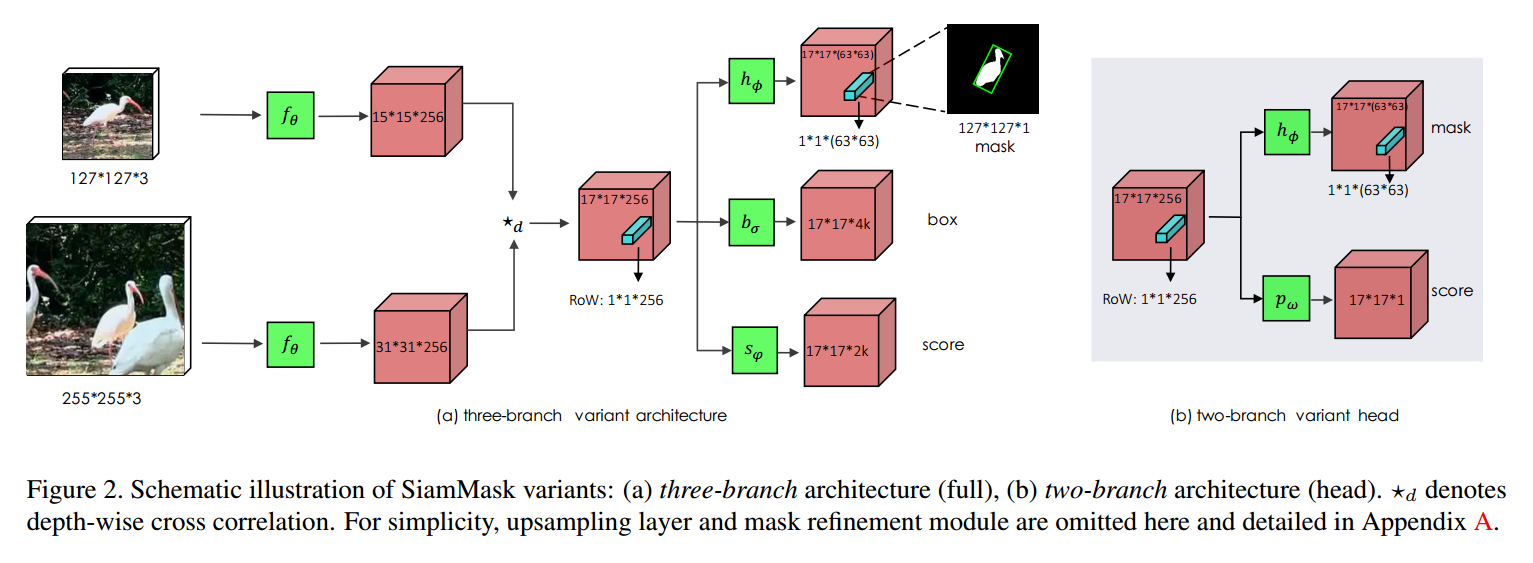
其中,分割模块的具体网络结构,如下所示:

其实,貌似就是这样简单。但是由于 Siamese tracker 效率很高,加上分割的分支之后,速度也没有变慢很多。但是,在 VOT 的跟踪数据集上,取得了很好的跟踪效果。

总结:
关于该文章,算是在 Siamese Tracker 基础上的改进,当然不限于文中所涉及到的两个跟踪算法,SiamFC 和 Siamese RPN。比如 MDNet 的几个基于分类的跟踪算法,也存在类似的目标表达方面的问题,即:Scale variation 。由于本文是基于 Siamese tracker 来做的,原始 Siamese tracker 的一些毛病,可能依然存在,如:heavy occlusion,fast motion 等问题。本文的作者也对跟踪未来的发展做了一些展望,详情可参考其知乎文章:https://zhuanlan.zhihu.com/p/58154634 。
匆匆扫了扫论文,还没来得及跑跑代码。明天跑一下 demo video,再来总结吧。
==

 浙公网安备 33010602011771号
浙公网安备 33010602011771号