论文笔记:Learning regression and verification networks for long-term visual tracking
Learning regression and verification networks for long-term visual tracking
2019-02-18 22:12:25
Paper:https://arxiv.org/abs/1809.04320
Code:https://github.com/xiaobai1217/MBMD
一、文章动机:
本文是为了更好的处理长期跟踪问题,而提出一种结合 Regression 和 Classification Network 的跟踪方法。因为常规的视觉跟踪依赖于 Tracking-by-detection 框架,这种框架自带的局部搜索机制无法很好的处理快速运动,目标的完全消失等挑战性因素。所以,如何针对这些问题,设计基于全局的搜索机制是一个非常值得研究的问题。本文也采用了 Local 和 Global search 相结合的策略,来处理这一问题。
二、跟踪流程:
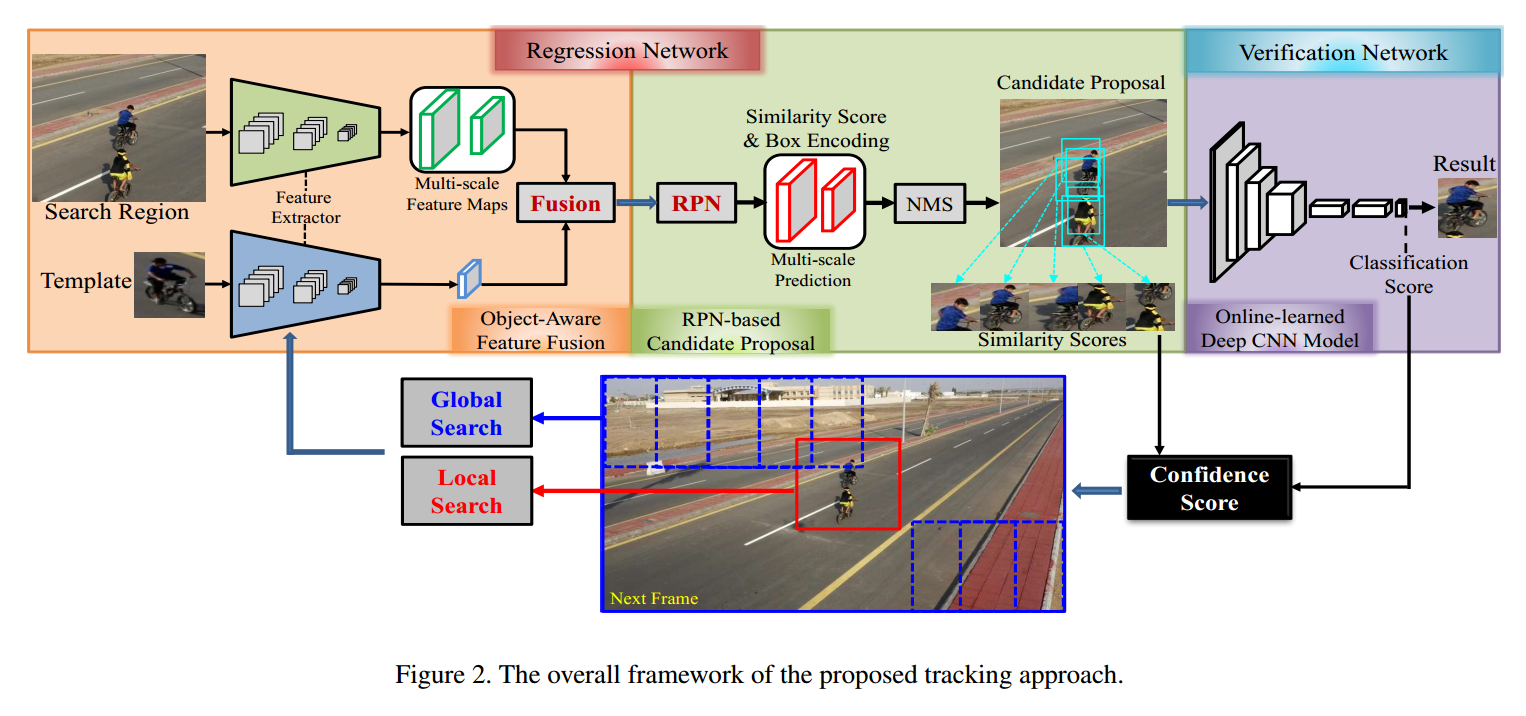
整体的流程图如上图所示, 主要包含 Regression Network 和 Verification Network。其中回归网络的作用主要是特征提取+候选框产生;而验证网络的作用是为了提供更好的打分依据(基于 MDNet 强大的判别能力)。
1. Regression Network:
该网络采用 SSD 检测框架以及 MobileNet 为特征提取器。两路网络共享相同的网络结构。由于 Search Region 和 Template 的大小并不一致,所以这里会有两个 feature map 输出。这两个 feature map 将会进行融合,输入到 RPN 网络中。融合的过程如下图所示:
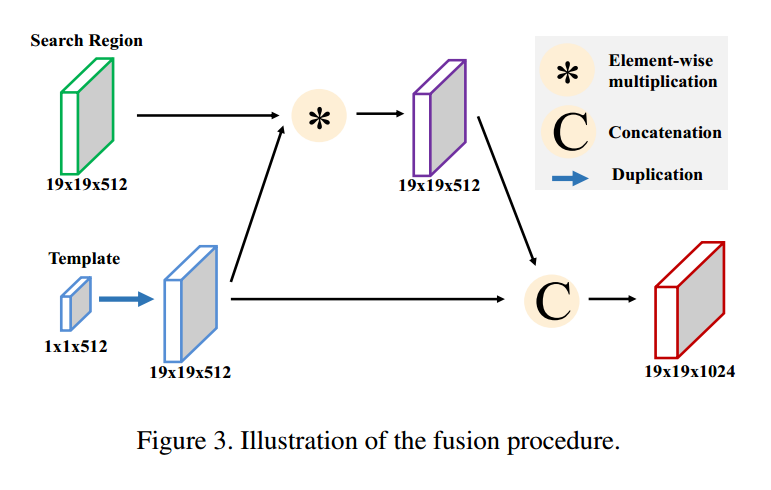
经过 RPN 之后,再利用 NMS 进行 BBox 的筛选,得到候选框。在上述过程中,很自然的有如下的疑问:为什么要将 Template 和 Search Region 进行融合?这里作者给出的解释是:to provide the region proposal networks with representative features of the search region。相当于简单的进行了一次 Siamese FC 的操作,得到了目标物体的响应图。这样,RPN 网络更容易进行 Proposal 的生成(or 生成高质量的 Proposal)。
2. Verification Network:
有了上述产生的候选框,紧接着引入分类网络进行候选框的打分。这里就是将上述 proposal 输入到一个分类网络中,得到是前景还是背景的得分。
3. Tracking Strategy:
如果是基于 Tracking-by-detection framework,已经可以进行跟踪了,并且可以取得还不错的效果。但是,Local 的搜索机制无法很好的处理上述提到的 短暂消失等问题。所以,作者这里采用阈值控制法,即,根据是否阈值的高低,来推测当前帧是否发生了物体完全消失的情况,实现 Local search 和 Global search 的切换。Global Proposal 产生的方法也是基于滑动窗口的方式进行的。该阈值的计算方式如下(由 Regression 和 Verification 的结果共同决定):

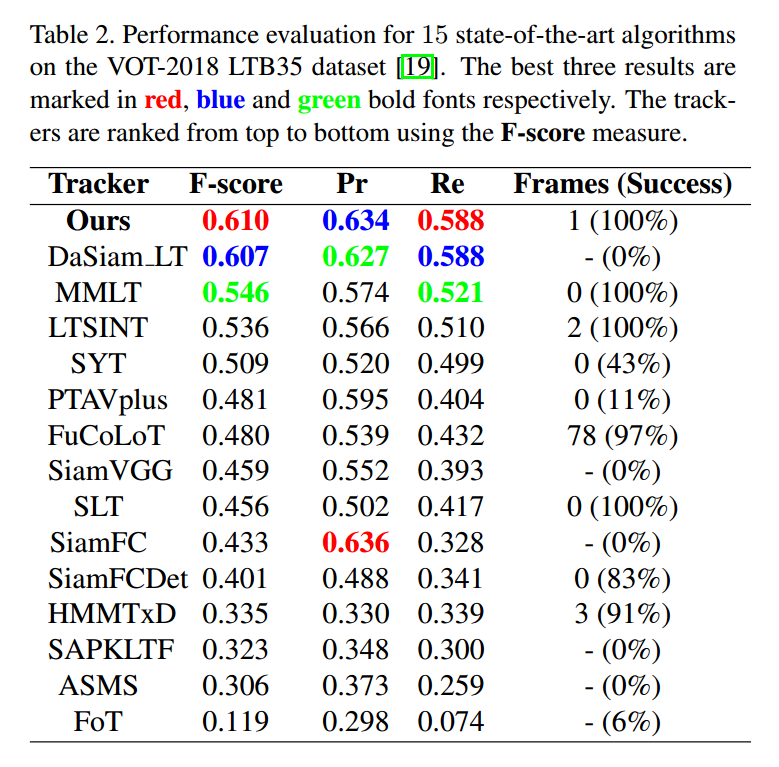
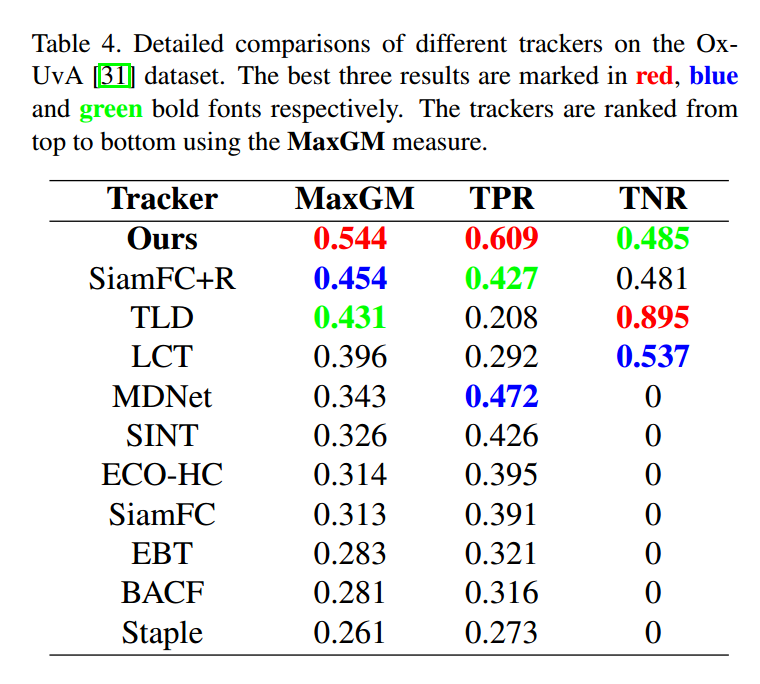
三、实验结果:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号