《信息安全系统设计与实现》第九周学习笔记
第五章 定时器及时钟服务
硬件定时器
定时器是由时钟源和可编程计数器组成的硬件设备。
时钟源通常是一个晶体振荡器,会产生周期性电信号,以精确的频率驱动计数器。使用一个倒计时值对计数器进行编程,每个时钟信号减1。当计数减为0时,计数器向CPU生成一个定时器中断,将计数值重新加载到计数器中,并重复倒计时。
计数器周期称为定时器刻度,是系统的基本计时单元。
个人计算机定时器
实时时钟(RTC)
RTC由一个小型备用电池供电。即使在个人计算机关机时,它也能连续运行。它用于实时提供时间和日期信息。当Linux启动时,它使用RTC更新系统时间变量,以与当前时间保持一致。在所有类Unix系统中,时间变量是一个长整数,包含 从1970年1月1日起经过的秒数。
可编程间隔定时器(PIT)
PIT是与CPU分离的一个硬件定时器。可对它进行编程,以提供以毫秒为单位的定时器刻度。在所有I/O设备中,PIT可以最高优先 级IRQ0中断。PIT定时器中断由Linux内核的定时器中断处理程序来处理,为系统操作提 供基本的定时单元,例如进程调度、进程间隔定时器和其他许多定时事件。
多核CPU中的本地定时器
在多核CPU中,每个核都是一个独立的处理器,它有自己的本地定时器,由CPU时钟驱动。
高分辨率定时器
大多数电脑都有一个时间戳定时器(TSC),由系统时钟驱动。它的内容可通过64位TSC寄存器读取。由于不同系统主板的时钟频率可能不同,TSC不适合作为实时设备,但它提供纳秒级的定时器分辨率。
CPU操作
每个CPU都有一个程序计数器(PC),也称为指令指针(IP),以及一个标志或状态寄存器(SR)、一个堆栈指针(SP)和几个通用寄存器,当PC指向内存中要执行的下一条指令时,SR包含CPU的当前状态,如操作模式、中断掩码和条件码,SP指向当前堆栈栈顶。
CPU操作可通过无限循环进行建模。
time系统调用
clock_t times(struct tms *buf);可用于获取某进程的具体执行时间。它将进程时间存储在struct tms buf中:
struct tms{
clock_t tms_utime; // user mode time
clock_t tms_stime; // system mode time
clock_t tms_cutime; // user time of children
clock_t tms_cstime; // system time of children
};
time和date命令
date:打印或设置系统日期和时间。
time:报告进程在用户模式和系统模式下的执行时间和总时间。
hwclock:查询并设置硬件时钟(RTC),也可以通过BIOS来完成。
间隔定时器
间隔定时器的值用以下结构体(在<sys/time.h>中)定义:
struct itimerval {
struct timeval it_inteirval;
struct timeval it_value;
};
struct timeval (
time_t tv_sec;
suseconds_t tv_usec;
);
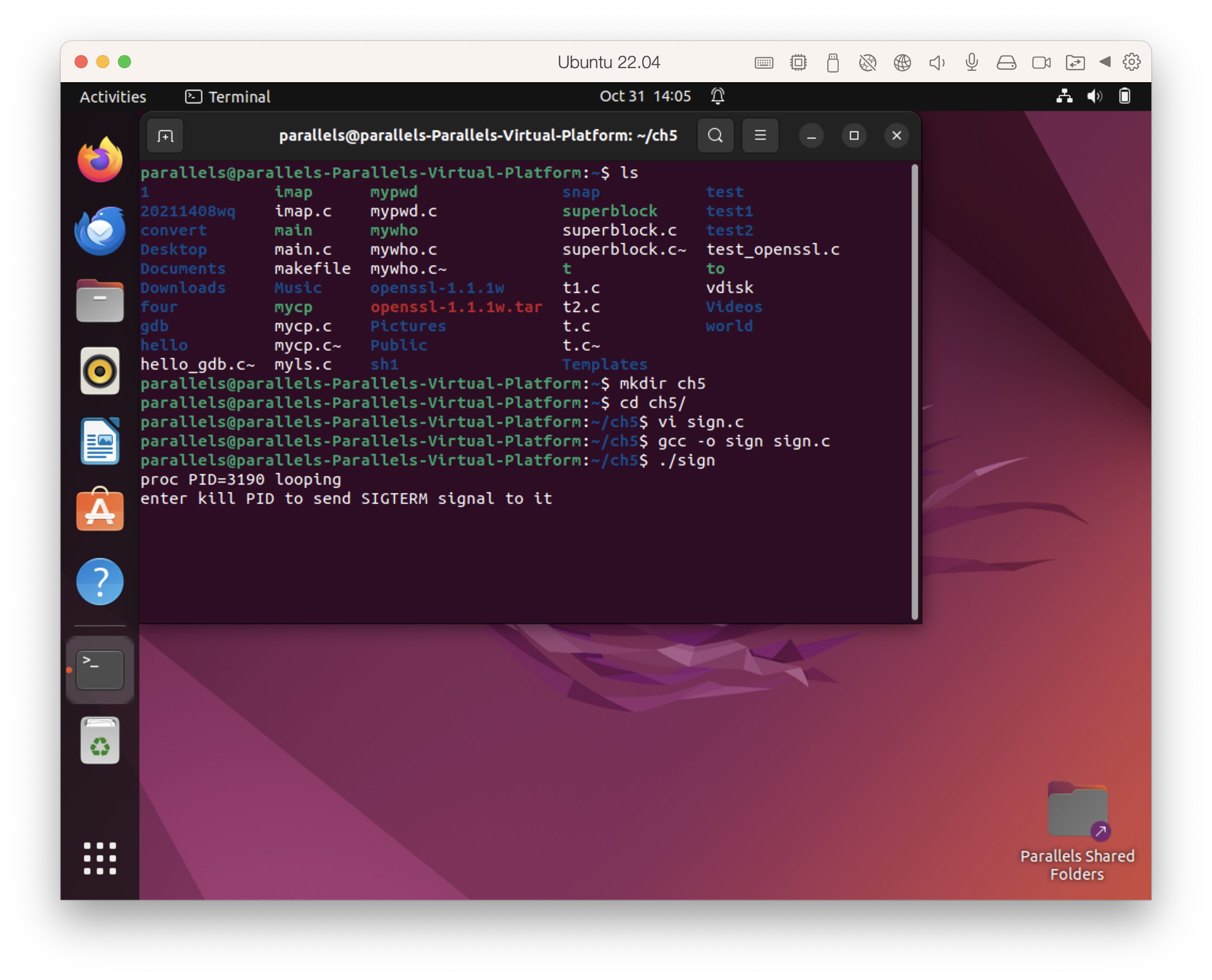
sigaction使用示例:
#include <stdio.h>
#include <unistd.h>
#include <string.h>
#include <signal.h>
//#include <siginfo.h>
void handler(int sig, siginfo_t *siginfo, void *context)
{
printf("handler: sig=%d from PID=%d UID=%d\n",sig, siginfo->si_pid, siginfo->si_uid);
}
int main(int argc, char *argv[])
{
struct sigaction act;
memset(&act, 0, sizeof(act));
act.sa_sigaction = &handler;
act.sa_flags = SA_SIGINFO;
sigaction(SIGTERM, &act, NULL);
printf("proc PID=%d looping\n", getpid());
printf ("enter kill PID to send SIGTERM signal to it\n");
while(1)
{
sleep (10);
}
}
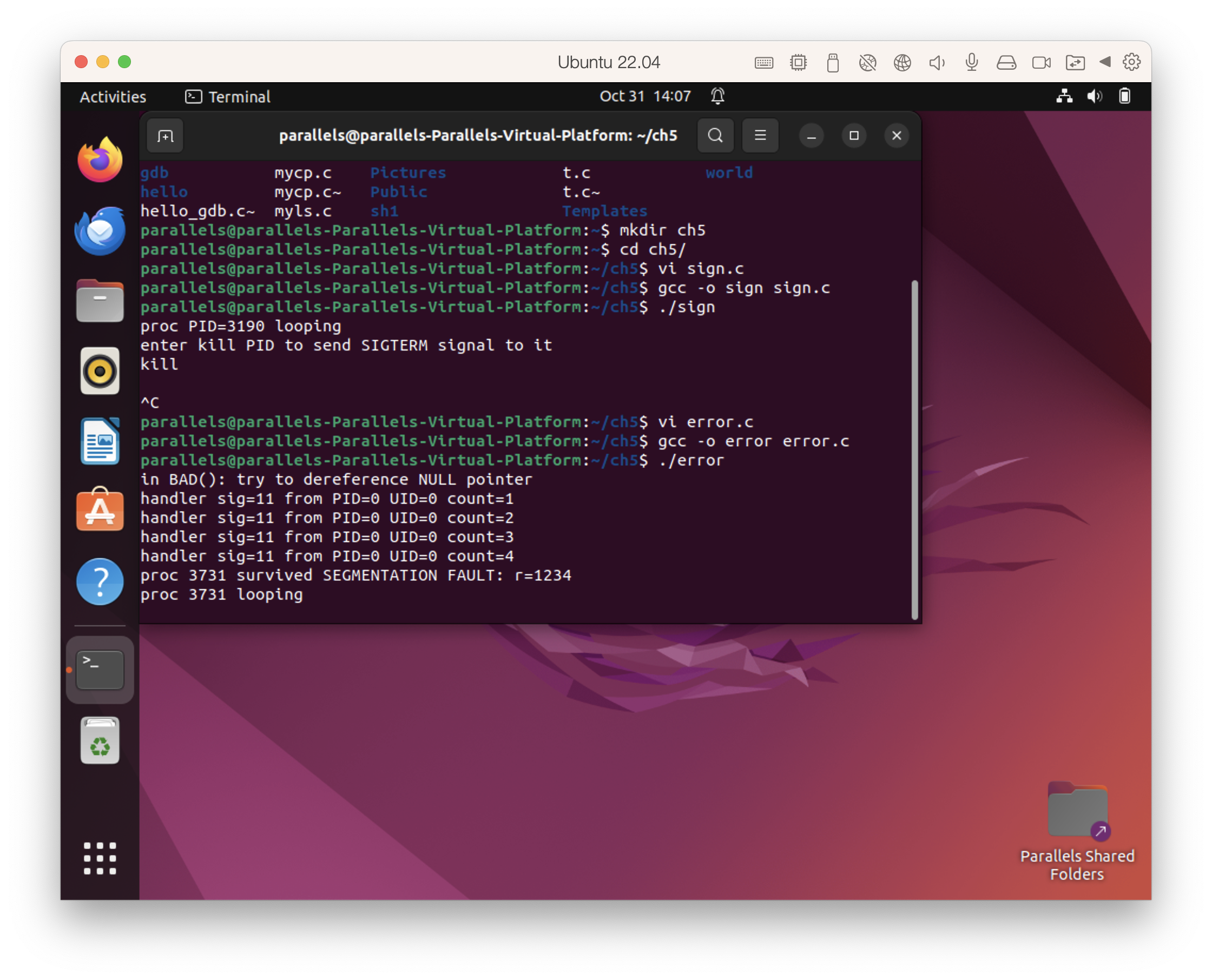
段错误捕捉函数:
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <signal.h>
#include <setjmp.h>
#include <string.h>
//#include <siginfo.h>
jmp_buf env;
int count = 0;
void handler(int sig, siginfo_t *siginfo, void *context)
{
printf ("handler sig=%d from PID=%d UID=%d count=%d\n", sig, siginfo->si_pid, siginfo->si_uid, ++count);
if (count >= 4) // let it occur up to 4 times
longjmp(env, 1234);
}
int BAD()
{
int *ip = 0;
printf("in BAD(): try to dereference NULL pointer\n");
*ip = 123; // dereference a NULL pointer
printf("should not see this line\n");
}
int main (int argc, char *argv[])
{
int r;
struct sigaction act;
memset (&act, 0, sizeof(act));
act.sa_sigaction = &handler;
act.sa_flags = SA_SIGINFO;
sigaction(SIGSEGV, &act, NULL);
if ((r = setjmp(env)) == 0)
BAD();
else
printf("proc %d survived SEGMENTATION FAULT: r=%d\n",getpid(), r);
printf ("proc %d looping\n" ,getpid());
while(1);
}
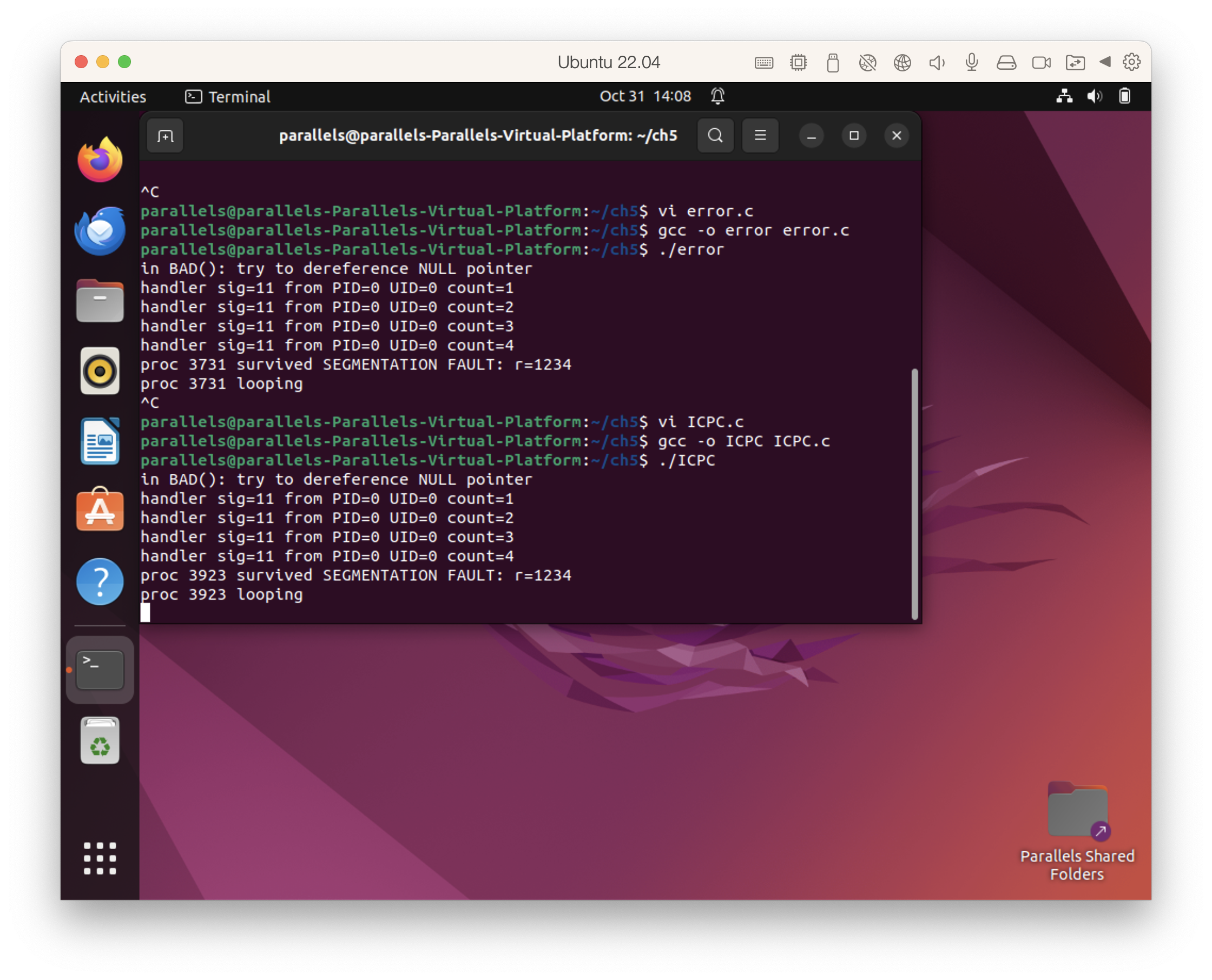
项目实例:
#include <stdio.h>
#include <signal.h>
#include <fcntl.h>
#include <string.h>
#include <stdlib.h>
#include <unistd.h>
#include <signal.h>
#include <setjmp.h>
#define LEN 64
int ppipe[2];
int pid;
char line[LEN];
int parent()
{
printf("parent %d running\n", getpid());
close(ppipe[0]); // parent = pipe writer
while(1)
{
printf("parent %d input a line : \n", getpid());
fgets(line, LEN, stdin);
line[strlen(line)-1] = 0; // kill \n at end
printf("parent %d write to pipe\n", getpid());
write(ppipe[1], line, LEN); // write to pipe
printf("parent %d send signal 10 to %d\n", getpid(), pid);
kill(pid, SIGUSR1); // send signal to child process
}
}
void chandler(int sig)
{
printf("\nchild %d got an interrupt sig=%d\n", getpid(), sig);
read(ppipe[0], line, LEN); // read pipe
printf("child %d get a message = %s\n", getpid(), line);
}
int child()
{
char msg[LEN];
int parent = getppid();
printf("child %d running\n", getpid());
close(ppipe[1]); // child is pipe reader
signal(SIGUSR1, chandler); // install signal catcher
while(1);
}
int main ()
{
pipe(ppipe); // create a pipe
pid = fork() ; // fork a child process
if (pid) // parent
parent();
else
child ();
}
苏格拉底挑战
- 硬件定时器
![]()
![]()
- 个人计算机定时器
![]()
![]()

 浙公网安备 33010602011771号
浙公网安备 33010602011771号