
python 位置式pid计算仿真
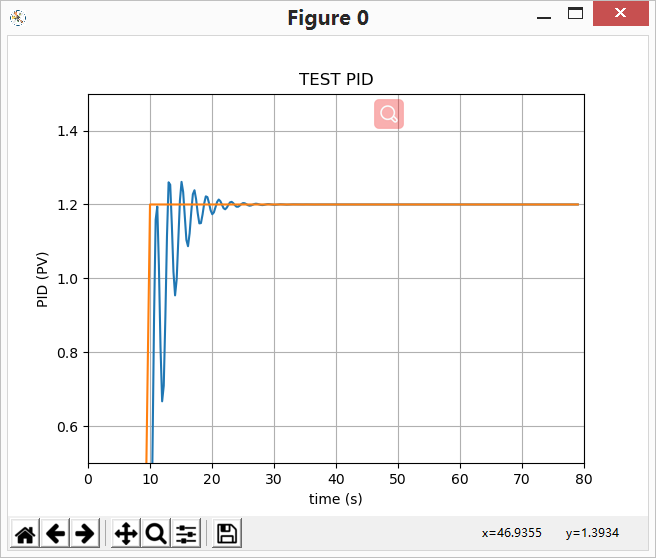
import time import matplotlib import matplotlib.pyplot as plt import numpy as np from scipy.interpolate import make_interp_spline as spline class PID: def __init__(self, P=0.2, I=0.0, D=0.0): self.kp = P self.ki = I self.kd = D self.setValue = 0 self.lastErr = 0 self.errSum = 0 self.errSumLimit = 10 def pidCalculate(self, curValue): err = self.setValue - curValue dErr = err - self.lastErr self.lastErr = err self.errSum += err if (self.errSum < -self.errSumLimit): self.errSum = -self.errSumLimit elif (self.errSum > self.errSumLimit): self.errSum = self.errSumLimit self.output = self.kp * err + (self.ki * self.errSum) + (self.kd * dErr) return self.output def testPid(P = 0.2, I = 0.0, D = 0.0, Len = 100): pid = PID(P, I, D) pid.setValue = 0 curValue = 0 curValueList = [] timeList = [] setValueList = [] for i in range(1, Len): out = pid.pidCalculate(curValue) curValue = out if i > 9: pid.setValue = 1.2 time.sleep(0.01) curValueList.append(curValue) setValueList.append(pid.setValue) timeList.append(i) timeSm = np.array(timeList) timeSmooth = np.linspace(timeSm.min(), timeSm.max(), 300) #将x轴300等分 curValueSmooth = spline(timeList, curValueList)(timeSmooth) #插值.使原y轴数据平滑 plt.figure(0) plt.plot(timeSmooth, curValueSmooth) plt.plot(timeList, setValueList) plt.xlim((0, Len)) plt.ylim((min(curValueList)-0.5, max(curValueList)+0.5)) plt.xlabel('time (s)') plt.ylabel('PID (PV)') plt.title('TEST PID') plt.ylim((1-0.5, 1+0.5)) plt.grid(True) plt.show() if __name__ == "__main__": testPid(0.35, 0.6, 0.05, Len=80)
代码环境:
python:3.7.0
matplotlib 3.2.1
numpy 1.17.3
scipy 1.4.1

 浙公网安备 33010602011771号
浙公网安备 33010602011771号