

abb机器人相关
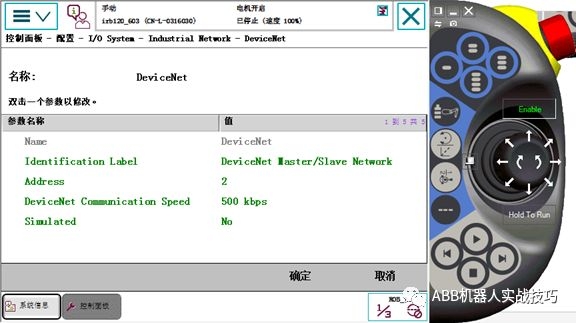
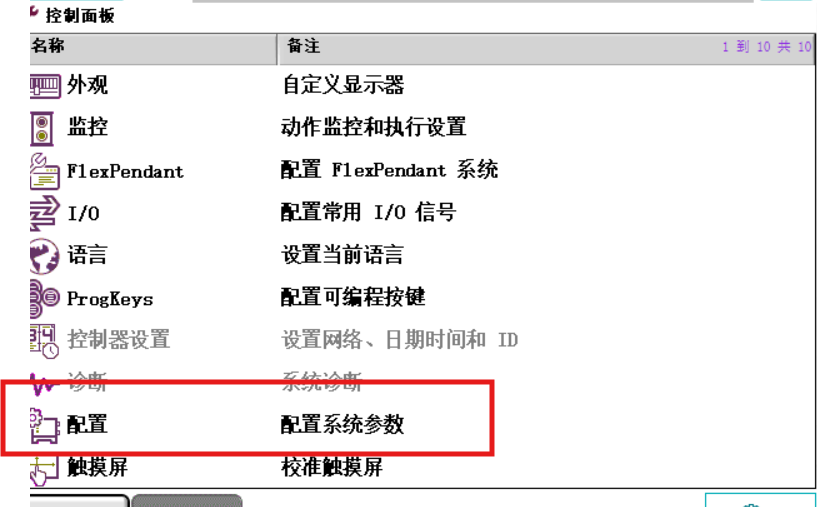
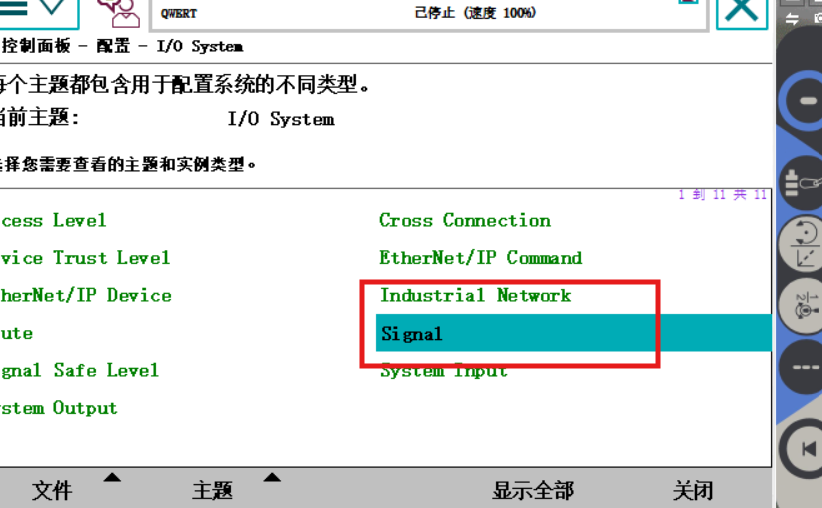
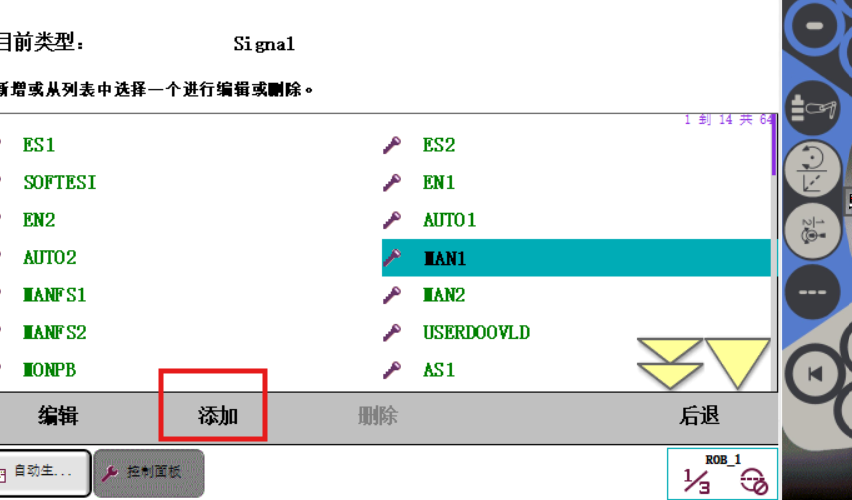
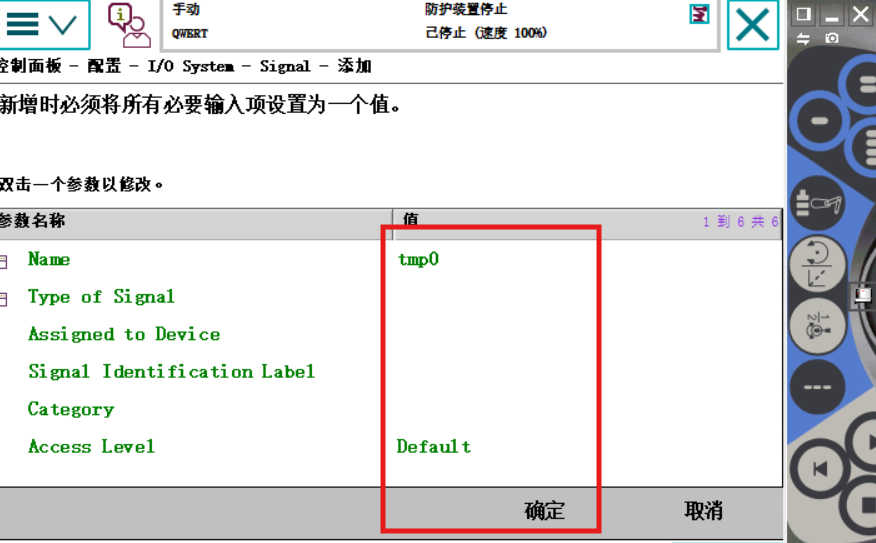
D-Net配置
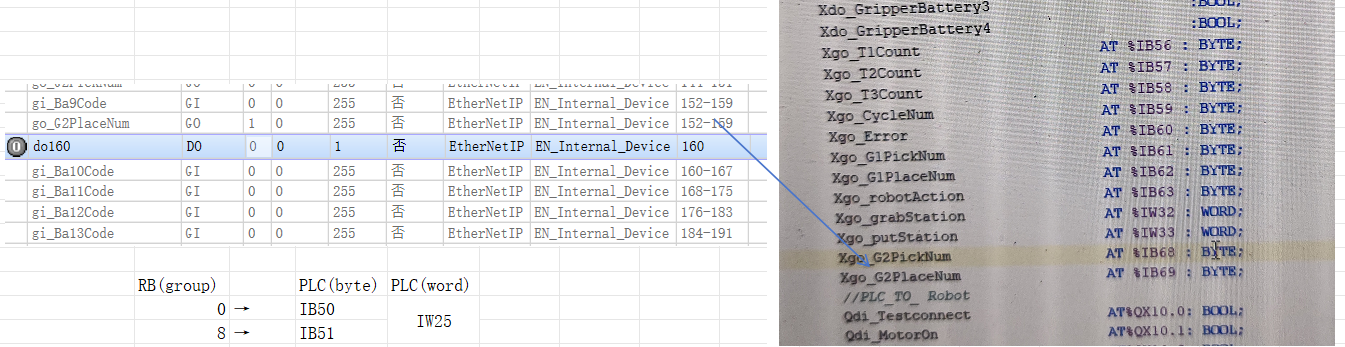
EIP点位映射施耐德PLC

机器人更换电机后校准原点


添加绝对原点


示教器中显示中文注释
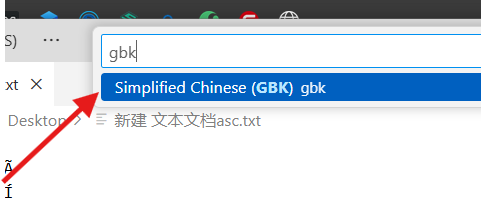
- 在vscode中用ascii编码方式输入中文
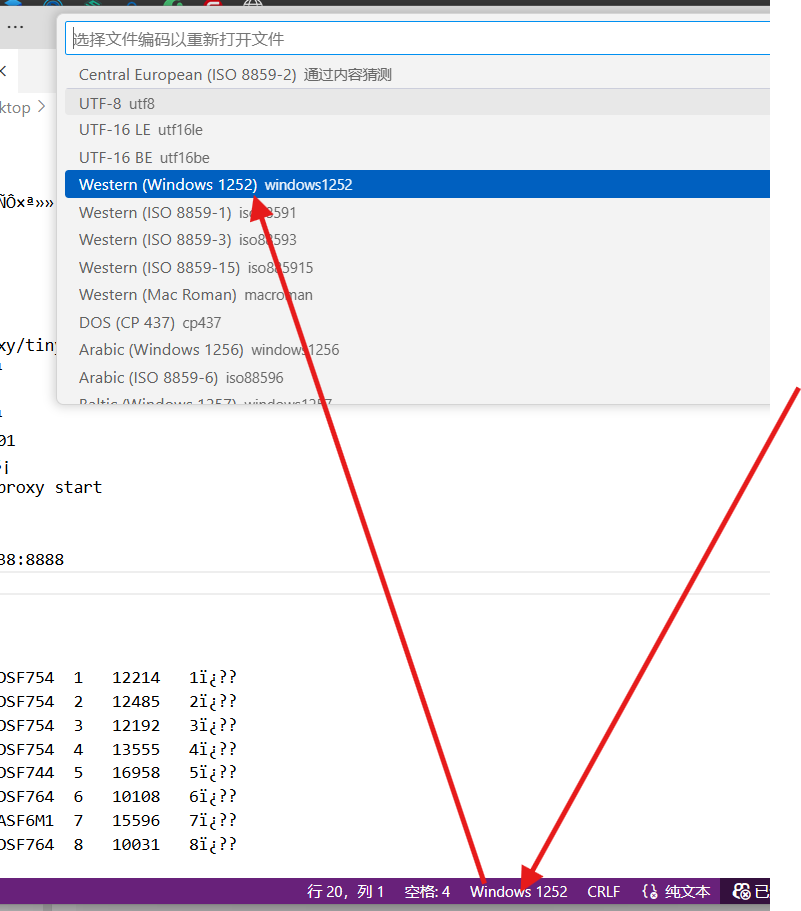
- vscode中改变编码方式为西欧编码
- 将改变后的文字复制到程序文件中
- 主要!后要有空格
- 问题:从新用robotstudio打开后再导入机器人注释会显示乱码
机器人偏移量平均计算
PROC init()
offset := abs(p10.trans.x - p20.trans.x)/39;
ENDPROC
abb机器人碰撞回退程序
MODULE MainModule
PROC Main()
WHILE TRUE DO
MoveJ pHome, v1000, z50, tool0;
Place_1:
SearchL\Stop, di_Crash1\NegFlank, pfound1, Offs(pPlace,0,0,0), v100, tGriper\WObj:=CurWobj;//NegFlank信号取反,从pfound1开始检测到pPlace点位
IF di_Crash1 =0 THEN
GOTO Place_2;//碰撞到了,跳转到回退处理行
ENDIF
Place_2:
IF di_Crash1 =0 THEN //判断是否有碰撞,避免误入程序
pfound1:=CRobT(\Tool:=tGriper\WObj:=CurWobj);
MoveL offs(pfound1,0,0,100), vMidLoad, fine, tGriper\WObj:=CurWobj;//回退100
Setgo go_Error, 1;//给PLC报错
PulseDO\PLength:=1,do_RobError;
Stop;
Setgo go_Error, 0;
GOTO Place_1;//再启动时再次进入运动程序
ENDIF
ENDWHILE
ENDPROC
abb机器人信号仿真
abb机器人中断程序
MODULE MainModule
VAR intnum HPError1:= 0;
VAR intnum HPError2:= 0;
PROC rInitAll()
Startmove;
CONNECT HPError1 WITH rHP1Error;\\中断号链接中断处理程序
ISignalDI zhongduan, 0, HPError1;\\信号链接检测到下降到0,触发中断程序
CONNECT HPError2 WITH rHP1Error;\\此处触发同一个中断处理程序
ISignalDI zhuanduan2, 0, HPError2;
ISleep HPError1;\\暂时关闭中断检测
IWatch HPError1;\\暂时关闭中断取消
ENDPROC
PROC Main()
rInitAll;
WHILE TRUE DO
MoveJ [[734.31,705.94,1217.50],[0.463801,-0.323519,0.803328,0.186784],[0,-1,0,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]], v1000, z50, tool0;
MoveJ [[1018.61,0.00,1217.50],[0.5,7.70773E-10,0.866025,4.45006E-10],[0,0,0,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]], v1000, z50, tool0;
ENDWHILE
ENDPROC
TRAP rHP1Error
Stopmove;\\停止移动
IDisable;
StorePath;\\记录轨迹
Stop;
RestoPath; \\继续轨迹
StartMove;
IEnable; \\再次开启中断程序
ENDTRAP
ENDMODULE
~~~
 浙公网安备 33010602011771号
浙公网安备 33010602011771号