

随笔分类 - 四、机器人
摘要: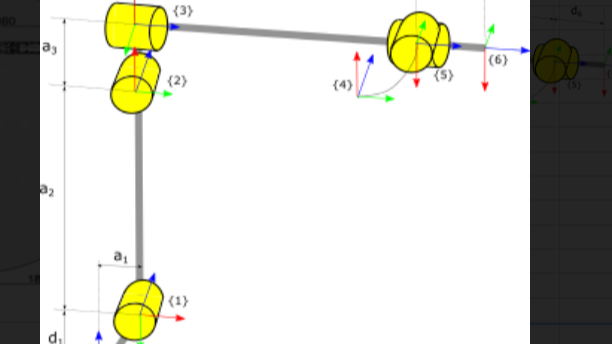 https://ingmec.ual.es/tmm/L09_01_robotics.html#the-simulator 参考链接 SDH建模
阅读全文
https://ingmec.ual.es/tmm/L09_01_robotics.html#the-simulator 参考链接 SDH建模
阅读全文
https://ingmec.ual.es/tmm/L09_01_robotics.html#the-simulator 参考链接 SDH建模
阅读全文
摘要: 机器人绝对原点标定相关指令 标定原点 encreset 1,2,3,4 //编码器复位 重启控制器 机器人移动到原点处 calpls 0,0,0,0 //当前位编码值置零 calib 1,2,3,4 检查原点 机器人推出原定位置 Motor on //电机使能打开 pulse 0,0,0,0//运动
阅读全文
机器人绝对原点标定相关指令 标定原点 encreset 1,2,3,4 //编码器复位 重启控制器 机器人移动到原点处 calpls 0,0,0,0 //当前位编码值置零 calib 1,2,3,4 检查原点 机器人推出原定位置 Motor on //电机使能打开 pulse 0,0,0,0//运动
阅读全文
机器人绝对原点标定相关指令 标定原点 encreset 1,2,3,4 //编码器复位 重启控制器 机器人移动到原点处 calpls 0,0,0,0 //当前位编码值置零 calib 1,2,3,4 检查原点 机器人推出原定位置 Motor on //电机使能打开 pulse 0,0,0,0//运动
阅读全文
摘要: 厂家密码 随机码or 4353二进制操作 电池错误清楚 管理员密码 26722719 干涉空间信号设置 系统信号配置
阅读全文
厂家密码 随机码or 4353二进制操作 电池错误清楚 管理员密码 26722719 干涉空间信号设置 系统信号配置
阅读全文
厂家密码 随机码or 4353二进制操作 电池错误清楚 管理员密码 26722719 干涉空间信号设置 系统信号配置
阅读全文
摘要: D-Net配置 EIP点位映射施耐德PLC 机器人更换电机后校准原点 添加绝对原点 示教器中显示中文注释 在vscode中用ascii编码方式输入中文 vscode中改变编码方式为西欧编码 将改变后的文字复制到程序文件中 主要!后要有空格 问题:从新用robotstudio打开后再导入机器人注释会显
阅读全文
D-Net配置 EIP点位映射施耐德PLC 机器人更换电机后校准原点 添加绝对原点 示教器中显示中文注释 在vscode中用ascii编码方式输入中文 vscode中改变编码方式为西欧编码 将改变后的文字复制到程序文件中 主要!后要有空格 问题:从新用robotstudio打开后再导入机器人注释会显
阅读全文
D-Net配置 EIP点位映射施耐德PLC 机器人更换电机后校准原点 添加绝对原点 示教器中显示中文注释 在vscode中用ascii编码方式输入中文 vscode中改变编码方式为西欧编码 将改变后的文字复制到程序文件中 主要!后要有空格 问题:从新用robotstudio打开后再导入机器人注释会显
阅读全文
摘要: 密码 admin:457890 示教:012345 备份机器人程序 1. 选择到U盘目录 2. 新建文件夹 3. 进行备份 加载备份的程序 1. 进入U盘目录 同备份手法 2. 加载备份程序 机器人与三菱plc cclink通讯设置
阅读全文
密码 admin:457890 示教:012345 备份机器人程序 1. 选择到U盘目录 2. 新建文件夹 3. 进行备份 加载备份的程序 1. 进入U盘目录 同备份手法 2. 加载备份程序 机器人与三菱plc cclink通讯设置
阅读全文
密码 admin:457890 示教:012345 备份机器人程序 1. 选择到U盘目录 2. 新建文件夹 3. 进行备份 加载备份的程序 1. 进入U盘目录 同备份手法 2. 加载备份程序 机器人与三菱plc cclink通讯设置
阅读全文
 浙公网安备 33010602011771号
浙公网安备 33010602011771号