Harris角点检测
论文:C.Harris and M.Stephens. "A Combined Corner and Edge Detector. Proceedings of the 4th Alvey Vision Conference: pages147--151.
为什么需要检测角点
传统的边缘检测(如Sobel、Canny算法)虽然能找到图像中的线条,但这些线条上的点往往特征不够明显。而角点作为两条边缘的交点,具有以下独特优势:
- 方向不变性:无论从哪个角度观察,角点都能保持特征稳定性
- 唯一性:同一场景的不同图像中,角点更容易被重复检测
- 定位精确:像素级精度的位置检测能力
角点的直观理解
观察一个小窗口在图像上移动时的变化:
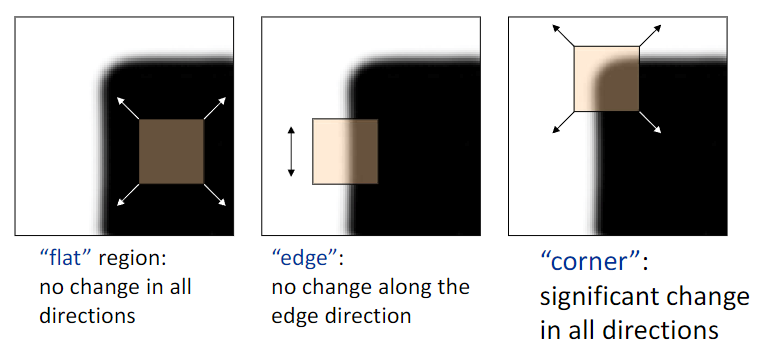
- 平坦区域:无论怎么移动,窗口内的像素几乎没有变化
- 边缘区域:沿边缘方向移动时变化很小,但垂直边缘方向移动时变化剧烈
- 角点区域:无论向哪个方向移动,窗口内的像素都会发生明显变化
所以,角点的本质特征是:在多个方向上具有显著的局部变化。
如何用数学方法描述这样的点?
数学建模
我们用一个能量函数来量化窗口移动带来的变化:
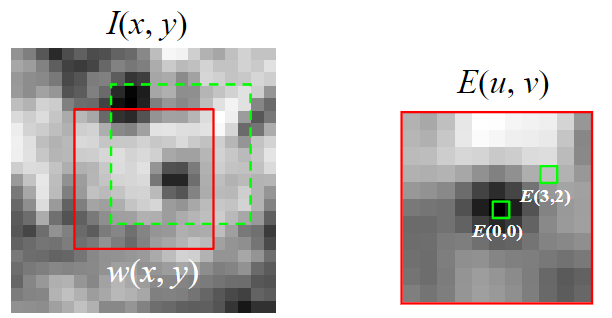
\(I(x, y)\)表示图像,\([I(x+u, y+v)-I(x, y)]^{2}\)描述了窗口内像素变化量,与\(w(x, y)\)加权求和得到整个窗口内所有像素的变化。也就是当我把窗口移动(u,v)时,图中显示把红色框框移动到绿色虚线框框,整个窗口内的变化大小,由E(u,v)来描述。
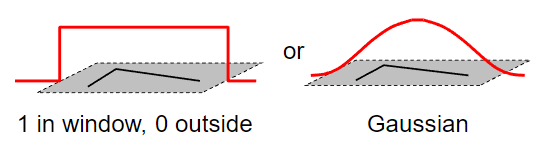
其中权值项w(x,y)可以是全1矩阵,表示所有点一视同仁,如果用高斯矩阵,表示越靠近中心的点越重要。
所以用数学语言描述刚才讲的“移动小窗口观察各个方向变化”,就是关注E(u,v)是如何随u,v变化。
换句话说就是观察E(u,v)随(u,v)这个方向上是如何变化的。
可以看到,当(u, v)等于(0, 0)时,窗口移动量为0,红框和绿框重合,没有差异,E(u,v)也就是0。
如何研究这种变化呢?
泰勒展开简化计算
显然,我们希望关注的是(u, v)在一个小范围变化时,E(u,v)的变化,也就是局部特征。范围大了,两个框框距离太远了,找出的变化就没什么意义了。此外,我们也更希望关注E(u,v)在(0,0)点附近的变化趋势,因为(0,0)点就是在我们当前点,我们要考虑在当前点附近E(u,v)的变化,从而判断当前点是否为角点。
另外,E(u,v)中的I(x,y)形式比较复杂,对于小位移情况如果直接求导计算会比较复杂。如果我们把它近似成一个多项式形式,就能大大简化我们的计算过程。同时还保留了局部的变化特性。
因此,我们将E(u,v)在(0,0)点进行二阶泰勒展开:
其中:
我们把(0,0)带进去可得:
简化可得:
其中:
理解M矩阵
此时,我们研究E(u,v)和u,v之间关系,就转化成研究M矩阵。
我们把E(u,v)的图画出来,大概是这个样子:
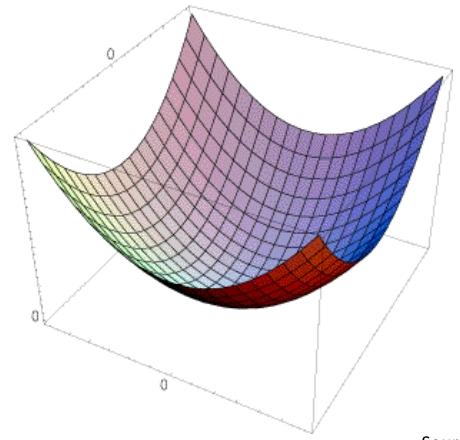
M决定了这个二次曲面的具体形状,也就决定了E(u,v)的变化情况。
由于二次曲面在其等值面上形状近乎一致,为了研究方便,我们用等值面对这个二次曲面进行研究。
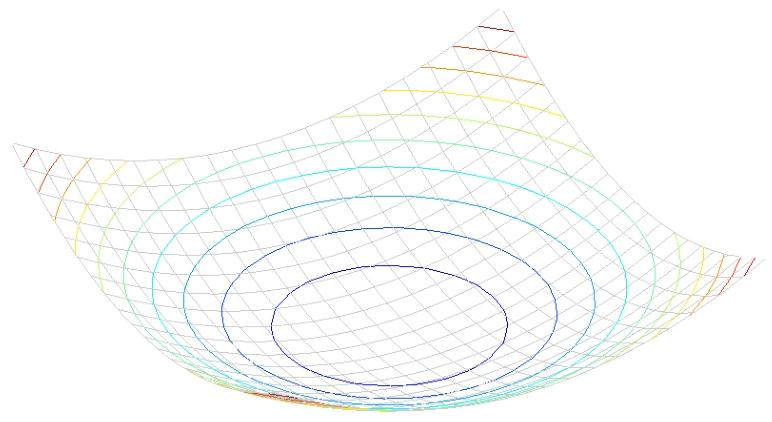
这个等值面是一个椭圆形。
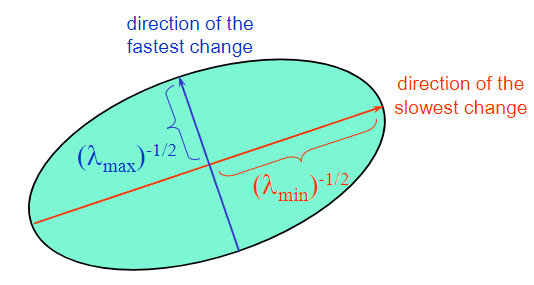
我们对M进行对角化处理,就能定量的得到这个椭圆的一些性质。
如下图,这里的λ1和λ2反映了椭圆的长轴和短轴,λmax越大,则该轴越短,从二次曲面上看,就是“爬升”的速度越快,且在这个方向上速度是最快的。反之,在λmin这个轴上,变化的最缓慢。
这个方向,是由R矩阵决定的,这是一个正交的旋转矩阵。也就是这个椭圆的旋转矩阵,也就描述的是E(u,v)在哪个方向上变化最快,哪个方向上变化最慢。
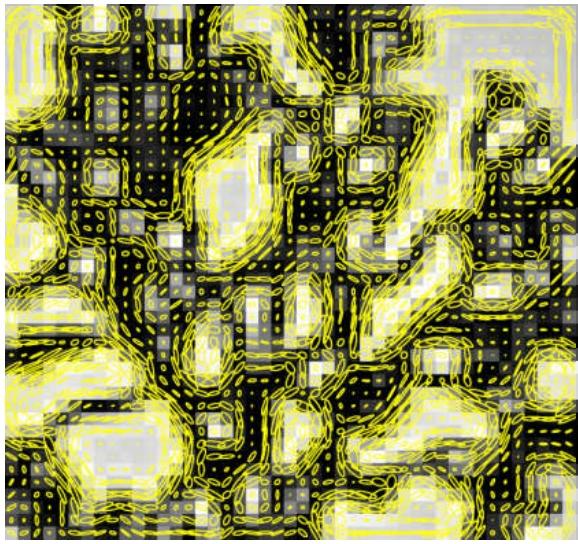
这是一张实际检测出的图片:
通常情况下,在我们检测角点的时候,是不关注旋转的,反正怎么旋转都不影响这是一个角点。因此,我们只要关注λ1和λ2的值。
利用M矩阵提取角点
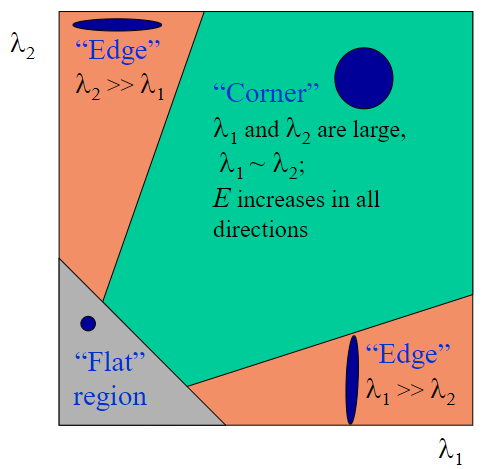
我们利用M矩阵得到λ1和λ2后,如果λ1远远大于λ2时,说明在一个方向上E(u,v)变化率远大于另一个方向,这应该是一条edge;如果λ1和λ2都很小,说明各个方向上变化率都小,这就是一个平坦的区域;如果λ1和λ2都很大,则该点在各个方向上变化率都很大,则该点更可能是一个角点。
Corner response function
为了更进一步的简化判断过程,我们采用这样一个响应方程来判断:
通常取α = 0.04 到 0.06
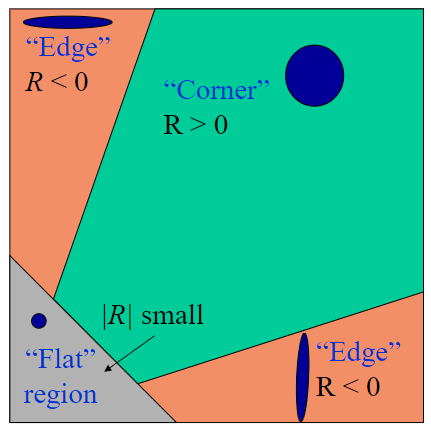
我们把上述分析套用到R中,如果λ1远远大于λ2时,λ1λ2应该是个小值,λ1+λ2应该是个大值,那么R小于0;如果λ1和λ2都很小,R的绝对值也是个小值;如果λ1和λ2都很大,则λ1λ2应该大于λ1+λ2,R大于0。
也就是我们可以通过R来判断该点是否为角点。
Harris角点检测步骤
- 计算每个像素点的高斯导数。(利用高斯偏导核,使用Sobel算子获取Ix,Iy)
- 在每个像素点周围的高斯窗口内计算二阶矩矩阵 M。
- 计算角点响应函数 R。
- 对 R 应用阈值处理。
- 寻找响应函数的局部最大值(非最大化抑制) 。
算法总结
Harris 角点检测的优点在于:
- 旋转不变性:对图像旋转不敏感
- 灰度不变性:对光照变化有一定鲁棒性
- 计算高效:基于梯度的局部计算
局限性: - 对尺度变化敏感

 浙公网安备 33010602011771号
浙公网安备 33010602011771号