linux下编程epoll实现将GPS定位信息上报到服务器
操作系统:CentOS
开发板:fl2440
开发模块:A7(GPS/GPRS),RT3070(无线网卡)
****************************************************************************************************************************************************************************************
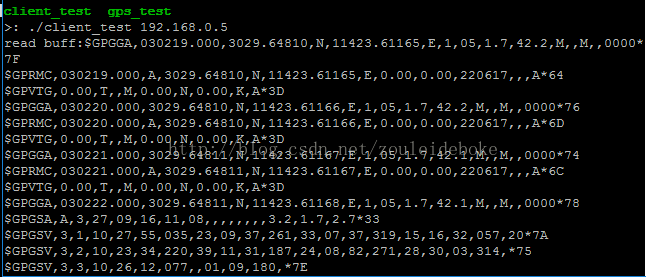
前言:本博文实现的功能是:fl2440开发板运行客户端程序,将GPS的定位信息通过串口读取出来,然后将定位信息发送到服务器上。
(当然服务器上跑的是自己编写的服务器端程序)这个就有点类似共享单车上面装的GPS定位系统,然后公司就可以根据其共享单车的地理位置信息进行定位管理。不过我这个只是一个小程序,功能比较单一,只是初步学习网络socket编程,不敢妄加定论,如有不对的地方,谢请指正。
对于初次学习网络socket编程的人来说,了解epoll的原理是必要的,网上有大量文章介绍epoll的原理以及它的用法,所以本文不做过多的赘述,只是简单的分析。
1.什么是epoll?
我的理解是:epoll是linux网络编程多路复用中的一种新的事件触发机制,相比于select,epoll最大的好处在于它不会随着监听fd数目的增长而降低效率,不过实现的原理大致相同,都是通过监听客户端套接字fd,也就是如果有多个客户端程序连接服务器,然后服务器端就将监听到的套接字fd存放在一个集合里,如果发现客户端套接字fd发生可读,可写,以及错误事件时,服务器端就进行相应的处理。不过epoll与poll及select不同的是,epoll采用的是基于事件的就绪通知方式。
在select/poll中,进程只有在调用一定的函数后,内核才对所有监视的文件描述符进行扫描,而epoll事先通过epoll_ctl()来注册一个文件描述符,一旦基于某个文件描述符就绪时,内核会采用类似callback的回调机制,迅速激活这个文件描述符,当进程调用epoll_wait()时便得到通知。
epoll实现一共就三个函数:
(1). int epoll_create(int size);
创建一个epoll的句柄,size用来告诉内核这个监听的数目一共有多大。这个参数不同于select()中的第一个参数,给出最大监听的fd+1的值。需要注意的是,当创建好epoll句柄后,它就会占用一个fd值,在linux下如果查看/proc/进程id/fd/,是能够看到这个fd的,所以在使用完epoll后,必须调用close()关闭,否则可能导致fd被耗尽。
(2).int epoll_ctl(int epfd, int op, int fd, struct epoll_event *event);
epoll的事件注册函数,它不同与select()是在监听事件时告诉内核要监听什么类型的事件,而是在这里先注册要监听的事件类型。第一个参数是epoll_create()的返回值,第二个参数表示动作,用三个宏来表示:
EPOLL_CTL_ADD:注册新的fd到epfd中;
EPOLL_CTL_MOD:修改已经注册的fd的监听事件;
EPOLL_CTL_DEL:从epfd中删除一个fd;
第三个参数是需要监听的fd,第四个参数是告诉内核需要监听什么事.
struct epoll_event结构如下:
typedef union epoll_data {
void *ptr;
int fd;
__uint32_t u32;
__uint64_t u64;
} epoll_data_t;
struct epoll_event {
__uint32_t events; /* Epoll events */
epoll_data_t data; /* User data variable */
};
events可以是以下几个宏的集合:
EPOLLIN :表示对应的文件描述符可以读(包括对端SOCKET正常关闭);
EPOLLOUT:表示对应的文件描述符可以写;
EPOLLPRI:表示对应的文件描述符有紧急的数据可读(这里应该表示有带外数据到来);
EPOLLERR:表示对应的文件描述符发生错误;
EPOLLHUP:表示对应的文件描述符被挂断;
EPOLLET: 将EPOLL设为边缘触发(Edge Triggered)模式,这是相对于水平触发(Level Triggered)来说的。
EPOLLONESHOT:只监听一次事件,当监听完这次事件之后,如果还需要继续监听这个socket的话,需要再次把这个socket加入到EPOLL队列里.
(3).int epoll_wait(int epfd, struct epoll_event * events, int maxevents, int timeout);
等待事件的产生,类似于select()调用。参数events用来从内核得到事件的集合,maxevents告之内核这个events有多大,这个 maxevents的值不能大于创建epoll_create()时的size,参数timeout是超时时间(毫秒,0会立即返回,-1将不确定,也有说法说是永久阻塞)。该函数返回需要处理的事件数目,如返回0表示已超时。
2.如何使用epoll?
通过在包含一个头文件#include <sys/epoll.h> 以及几个简单的API将可以大大的提高你的网络服务器的支持人数。
首先通过create_epoll(int maxfds)来创建一个epoll的句柄,其中maxfds为你epoll所支持的最大句柄数。
这个函数会返回一个新的epoll句柄,之后的所有操作将通过这个句柄来进行操作。在用完之后,记得用close()来关闭这个创建出来的epoll句柄。
之后在你的网络主循环里面,每一帧的调用epoll_wait(int epfd, epoll_event events, int max events, int timeout)来查询所有的网络接口,看哪一个可以读
哪一个可以写了。基本的语法为:
nfds = epoll_wait(kdpfd, events, maxevents, -1);
其中kdpfd为用epoll_create创建之后的句柄,events是一个epoll_event*的指针,当epoll_wait这个函数操作成功之后,epoll_events里面将储存所有的读写
件。max_events是当前需要监听的所有socket句柄数。最后一个timeout是 epoll_wait的超时,为0的时候表示马上返回,为-1的时候表示一直等下去,直到有事件
围,为任意正整数的时候表示等这么长的时间,如果一直没有事件,则返回。一般如果网络主循环是单独的线程的话,可以用-1来等,这样可以保证一些效率,如果是和主
辑在同一个线程的话,则可以用0来保证主循环的效率。epoll_wait返回之后应该是一个循环,遍利所有的事件。
epoll简单分析之后,进入正题:
-
/*********************************************************************************
-
* Copyright: (C) 2017 zoulei
-
* All rights reserved.
-
*
-
* Filename: client.c
-
* Description: This file
-
*
-
* Version: 1.0.0(2017年06月21日)
-
* Author: zoulei <zoulei121@gmail.com>
-
* ChangeLog: 1, Release initial version on "2017年06月21日 19时17分40秒"
-
*
-
********************************************************************************/
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
int set_serial(int fd,int nSpeed, int nBits, char nEvent, int nStop);
-
-
int main (int argc, char **argv)
-
{
-
int fd=0;
-
int n=0;
-
int i=0;
-
int sockfd;
-
int rec_len;
-
GPRMC gprmc;
-
char sendbuf[1024] ;
-
char buff[GPS_LEN];
-
char *str=NULL;
-
char *dev_name="/dev/ttyUSB0";
-
struct sockaddr_in servaddr;
-
/*打开"/dev/ttyUSB0"设备*/
-
if((fd=open(dev_name,O_RDWR|O_NOCTTY|O_NDELAY))<0)
-
{
-
perror("Can't Open the ttyUSB0 Serial Port");
-
return -1;
-
}
-
set_serial( fd,9600,8,'N',1);//串口配置函数
-
/* 判断命令端输入的参数是否正确 */
-
if( argc != 2)
-
{
-
printf("usage: ./client <ipaddress>\n");
-
exit(0);
-
}
-
/* 创建客户端套接字--IPv4协议,面向连接通信,TCP协议*/
-
if(( sockfd=socket(AF_INET,SOCK_STREAM,0))<0)
-
{
-
perror("socket");
-
exit(0);
-
}
-
/* 初始化 */
-
memset(&servaddr,0,sizeof(servaddr)); /* 数据初始化-清零 */
-
servaddr.sin_family = AF_INET; /* 设置IPv4通信 */
-
servaddr.sin_port = htons(PORT);/* 设置服务器端口号 */
-
/* IP地址转换函数,将点分十进制转换为二进制 */
-
if( inet_pton(AF_INET, argv[1], &servaddr.sin_addr) <= 0)
-
{
-
printf("inet_pton error for %s\n",argv[1]);
-
exit(0);
-
}
-
/* 将套接字绑定到服务器的网络地址上*/
-
if( connect( sockfd, (struct sockaddr *)&servaddr, sizeof(servaddr))<0)
-
{
-
perror("connected failed");
-
exit(0);
-
}
-
while(1)
-
{
-
sleep(2);
-
/*读串口设备获取GPS定位信息*/
-
if((n=read(fd,buff,sizeof(buff)))<0)
-
{
-
perror("read error");
-
return -1;
-
}
-
/*将GPS定位信息发送到服务器端*/
-
if(send(sockfd,buff,strlen(buff),0)< 0 )
-
{
-
printf("send the gps datas error:%s(errno: %d)\n", strerror(errno), errno);
-
exit(0);
-
}
-
-
printf("read buff:%s\n",buff);
-
-
}
-
close(sockfd);
-
close(fd);
-
return 0;
-
}
-
CC=/opt/buildroot-2012.08/arm920t/usr/bin/arm-linux-gcc
-
-
objs=uart1.o client.o
-
srcs=uart1.c client.c
-
-
client_test: $(objs)
-
$(CC) -o client_test $(objs)
-
@make clean
-
-
client.o: $(srcs) gps.h
-
$(CC) -c $(srcs)
-
-
uart1.o: uart1.c
-
$(CC) -c uart1.c
-
-
clean:
-
rm *.o
-
/*********************************************************************************
-
* Copyright: (C) 2017 zoulei.
-
* All rights reserved.
-
*
-
* Filename: sev.c
-
* Description: This file
-
*
-
* Version: 1.0.0(06/22/2017)
-
* Author: zoulei <zoulei121@gmail.com>
-
* ChangeLog: 1, Release initial version on "06/22/2017 11:25:16 AM"
-
*
-
********************************************************************************/
-
-
-
-
-
-
-
-
-
-
-
-
-
-
typedef unsigned int UINT;
-
typedef int BYTE;
-
-
typedef struct __gprmc__
-
{
-
UINT time;/* gps定位时间 */
-
char pos_state;/*gps状态位*/
-
float latitude;/*纬度 */
-
float longitude;/* 经度 */
-
float speed; /* 速度 */
-
float direction;/*航向 */
-
UINT date; /*日期 */
-
float declination; /* 磁偏角 */
-
char dd;
-
char mode;/* GPS模式位 */
-
-
}GPRMC;
-
-
int gps_analyse (char *buff,GPRMC *gps_data)
-
{
-
char *ptr=NULL;
-
if(gps_data==NULL)
-
{
-
return -1;
-
}
-
if(strlen(buff)<10)
-
{
-
return -1;
-
}
-
if(NULL==(ptr=strstr(buff,"$GPRMC")))
-
{
-
return -1;
-
}
-
sscanf(ptr,"$GPRMC,%d.000,%c,%f,N,%f,E,%f,%f,%d,,,%c*",&(gps_data->time),&(gps_data->pos_state),&(gps_data->latitude),&(gps_data->longitude),&(gps_data->speed),&(gps_data->direction),&(gps_data->date),&(gps_data->mode));
-
return 0;
-
}
-
-
int print_gps (GPRMC *gps_data)
-
{
-
printf(" \n");
-
printf(" \n");
-
printf("===========================================================\n");
-
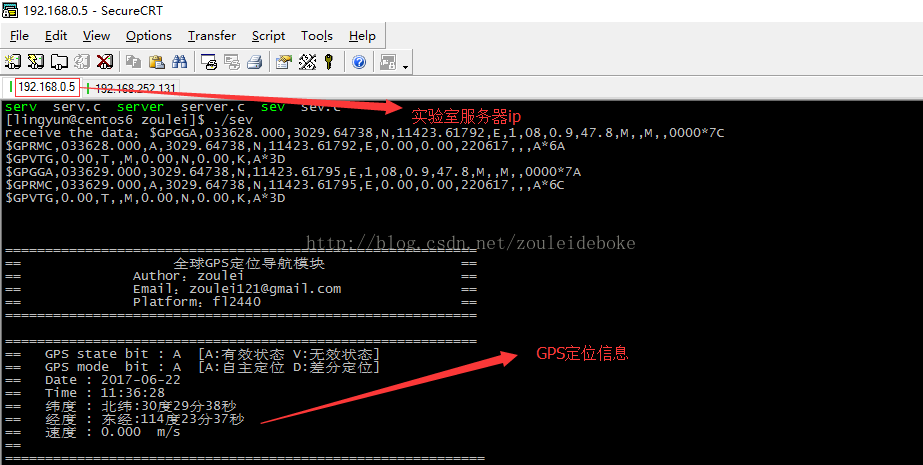
printf("== 全球GPS定位导航模块 ==\n");
-
printf("== Author:zoulei ==\n");
-
printf("== Email:zoulei121@gmail.com ==\n");
-
printf("== Platform:fl2440 ==\n");
-
printf("===========================================================\n");
-
printf(" \n");
-
printf("===========================================================\n");
-
printf("== GPS state bit : %c [A:有效状态 V:无效状态] \n",gps_data->pos_state);
-
printf("== GPS mode bit : %c [A:自主定位 D:差分定位] \n", gps_data->mode);
-
printf("== Date : 20%02d-%02d-%02d \n",gps_data->date%100,(gps_data->date%10000)/100,gps_data->date/10000);
-
printf("== Time : %02d:%02d:%02d \n",(gps_data->time/10000+8)%24,(gps_data->time%10000)/100,gps_data->time%100);
-
printf("== 纬度 : 北纬:%d度%d分%d秒 \n", ((int)gps_data->latitude) / 100, (int)(gps_data->latitude - ((int)gps_data->latitude / 100 * 100)), (int)(((gps_data->latitude - ((int)gps_data->latitude / 100 * 100)) - ((int)gps_data->latitude - ((int)gps_data->latitude / 100 * 100))) * 60.0));
-
printf("== 经度 : 东经:%d度%d分%d秒 \n", ((int)gps_data->longitude) / 100, (int)(gps_data->longitude - ((int)gps_data->longitude / 100 * 100)), (int)(((gps_data->longitude - ((int)gps_data->longitude / 100 * 100)) - ((int)gps_data->longitude - ((int)gps_data->longitude / 100 * 100))) * 60.0));
-
printf("== 速度 : %.3f m/s \n",gps_data->speed);
-
printf("== \n");
-
printf("============================================================\n");
-
-
return 0;
-
}
-
int main(int argc, char *argv[])
-
{ int max = 0 ;
-
int i = 0 ;
-
int len = 0 ;
-
int sockfd ;
-
int epfd ;
-
int connfd ;
-
int ret ;
-
int fd[OPEN_MAX];
-
char buff[512];
-
GPRMC gprmc;
-
struct epoll_event event; // 告诉内核要监听什么事件
-
struct epoll_event wait_event; //内核监听完的结果
-
struct sockaddr_in server_addr;
-
-
/* AF_INET 表示采用TCP/IP协议族 SOCK_STREAM 表示采用TCP协议 */
-
if(( sockfd = socket(AF_INET, SOCK_STREAM, 0))<0)
-
{
-
perror("creat socket error");
-
return -1;
-
}
-
memset(&server_addr,0,sizeof(server_addr));
-
server_addr.sin_family = AF_INET;
-
server_addr.sin_port = htons(9997);
-
server_addr.sin_addr.s_addr = htonl(INADDR_ANY);
-
/* 将socket绑定到某个IP和端口(IP标识主机,端口标识通信进程) */
-
if(( bind(sockfd, (struct sockaddr *)&server_addr, sizeof(server_addr)))<0)
-
{
-
perror("bind error");
-
return -1;
-
}
-
/* 将socket设置为监听模式,10表示等待连接队列的最大长度 */
-
if( listen(sockfd, 10) < 0)
-
{
-
perror("listen error");
-
return -1;
-
}
-
-
memset(fd,-1, sizeof(fd));
-
fd[0] = sockfd;
-
epfd = epoll_create(10); // 创建一个 epoll 的句柄,参数要大于 0, 不然没有太大意义
-
if( -1 == epfd )
-
{
-
perror ("epoll_create error");
-
return -1;
-
}
-
-
event.data.fd = sockfd; //监听套接字
-
event.events = EPOLLIN; // 表示对应的文件描述符可以读
-
/*事件注册函数,将监听套接字描述符 sockfd 加入监听事件 */
-
if(( ret = epoll_ctl(epfd, EPOLL_CTL_ADD, sockfd, &event)) == -1)
-
{
-
perror("epoll_ctl");
-
return -1;
-
}
-
-
while(1)
-
{
-
/* 监视并等待多个文件描述符的属性变化(是否可读)
-
没有属性变化,这个函数会阻塞,直到有变化才往下执行,这里没有设置超时.*/
-
ret = epoll_wait(epfd, &wait_event, max+1, -1);
-
/*监测sockfd(监听套接字)是否存在连接 */
-
if(( sockfd == wait_event.data.fd ) && ( EPOLLIN == wait_event.events & EPOLLIN ))
-
{
-
struct sockaddr_in cli_addr;
-
int clilen = sizeof(cli_addr);
-
/* 从tcp完成连接中提取客户端*/
-
if(( connfd = accept(sockfd, (struct sockaddr *)&cli_addr, &clilen)) < 0)
-
{
-
perror("accept faild");
-
return -1;
-
}
-
/* 将提取到的connfd放入fd数组中,以便下面轮询客户端套接字 */
-
for(i=1; i<OPEN_MAX; i++)
-
{
-
if(fd[i] < 0)
-
{
-
fd[i] = connfd;
-
event.data.fd = connfd; //监听套接字
-
event.events = EPOLLIN; // 表示对应的文件描述符可以读
-
-
/* 事件注册函数,将监听套接字描述符 connfd 加入监听事件 */
-
ret = epoll_ctl(epfd, EPOLL_CTL_ADD, connfd, &event);
-
if(-1 == ret)
-
{
-
perror("epoll_ctl");
-
return -1;
-
}
-
break;
-
}
-
}
-
/* max更新 */
-
if(i > max)
-
max = i;
-
/* 如果没有就绪的描述符,就继续epoll监测,否则继续向下看*/
-
if(--ret <= 0)
-
continue;
-
-
}
-
for(i=1; i<=max; i++)
-
{
-
if(fd[i] < 0)
-
continue;
-
-
if(( fd[i] == wait_event.data.fd ) && ( EPOLLIN == wait_event.events & (EPOLLIN|EPOLLERR) ))
-
{
-
/*接受客户端数据 */
-
if((len = recv(fd[i], buff, sizeof(buff), 0)) < 0)
-
{
-
if(errno == ECONNRESET)//tcp连接超时、RST
-
{
-
close(fd[i]);
-
fd[i] = -1;
-
}
-
else
-
perror("read error:");
-
}
-
else if(len == 0)//客户端关闭连接
-
{
-
close(fd[i]);
-
fd[i] = -1;
-
}
-
else //正常接收到客户端的数据
-
buff[len]='\0';
-
printf("receive the data:%s \n",buff);
-
memset(&gprmc, 0 , sizeof(gprmc));
-
gps_analyse(buff,&gprmc);
-
print_gps(&gprmc);
-
/*所有的就绪描述符处理完了,就退出当前的for循环,继续epoll监测 */
-
if(--ret <= 0)
-
break;
-
}
-
}
-
}
-
close(sockfd);
-
close(epfd);
-
return 0;
-
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号