

Temporal Difference - 时序差分学习
这篇博客是前面一篇博客Model-Free Policy Evaluation 无模型策略评估的一个小节,因为TD本身也是一种无模型策略评估方法。原博文有对无模型策略评估方法的详细概述。
Temporal Difference(TD)
时序差分
“if one had to identify one idea as central and novel to reinforcement learning, it would undoubtedly be temporal-difference(TD) learning.” - Sutton and Barto 2017
- 如果要选出对强化学习来说是最核心且最新颖的思想,那好毫无疑问是时序差分学习。-Sutton and Barto 2017
- 它结合了蒙特·卡罗尔(策略评估)方法和动态规划方法
- 不依赖模型
- Boostraps和samples(采样)都进行
Bootstrapping通常被用于近似未来回报的折扣总和;Sampling通常被用于近似所有状态上的期望。 - 在可重复进行和非有限horizon非重复情境下都可以使用(这说明它解决了动态规划和蒙特·卡罗尔方法的缺点,博主注)
- 在每一次 ( s , a , r , s ′ ) (s,a,r,s') (s,a,r,s′)四元组(即每一次状态变迁/每一次Observation)发生后都立即更新 V V V的估计
Temporal Difference Learning for Estimating V
- 目标:在给定由于遵循策略 π \pi π而产生的所有轮次的条件下估计 V π ( s ) V^\pi(s) Vπ(s)
- MDP M在遵循策略 π \pi π G t = r t + γ t t + 1 + γ 2 r t + 2 + γ 3 r t + 3 + . . . G_t=r_t+\gamma t_{t+1}+\gamma^2r_{t+2}+\gamma^3r_{t+3}+... Gt=rt+γtt+1+γ2rt+2+γ3rt+3+...
- V π ( s ) = E π [ G t ∣ s t = s ] V^\pi(s)=\mathbb{E}_\pi[G_t|s_t=s] Vπ(s)=Eπ[Gt∣st=s]
- 重温Bellman operator (如果MDP模型已知)
B π V ( s ) = r ( s , π ( s ) ) + γ ∑ s ′ ∈ S p ( s ′ ∣ s , π ( s ) ) V ( s ′ ) B^\pi V(s)=r(s,\pi(s))+\gamma \sum_{s' \in S}p(s'|s,\pi(s))V(s') BπV(s)=r(s,π(s))+γs′∈S∑p(s′∣s,π(s))V(s′) - 递增every-visit MC算法,使用一次对回报的采样更新估计
V π ( s ) = V π ( s ) + α ( G i , t − V π ( s ) ) V^\pi(s) = V^\pi(s)+\alpha(G_{i, t}-V^\pi(s)) Vπ(s)=Vπ(s)+α(Gi,t−Vπ(s)) - 灵感:已经有一个
V
π
V^\pi
Vπ的估计器,使用下面的方法估计回报的期望
V π ( s ) = V π ( s ) + α ( [ r t + γ V π ( s t + 1 ) ] − V π ( s ) ) V\pi(s) = V\pi(s) + \alpha([r_t+\gamma V^\pi(s_{t+1})]-V^\pi(s)) Vπ(s)=Vπ(s)+α([rt+γVπ(st+1)]−Vπ(s))
Temporal Difference [TD(0)] Learning
时序差分学习
- 目标:在给定由于遵循策略
π
\pi
π而产生的所有轮次的条件下估计
V
π
(
s
)
V^\pi(s)
Vπ(s) (同上)
- s 1 , a 1 , r 1 , s 2 , a 2 , r 2 , . . . s_1,a_1,r_1,s_2,a_2,r_2,... s1,a1,r1,s2,a2,r2,...其中动作a在策略 π \pi π下采样而来
- 最简单的采样TD学习:以趋近估计值的方式更新价值
V π ( s t ) = V π ( s t ) + α ( [ r t + γ V π ( s t + 1 ) ] − V π ( s t ) ) V^\pi(s_t)=V^\pi(s_t)+\alpha([r_t+\gamma V^\pi(s_{t+1})]-V^\pi(s_t)) Vπ(st)=Vπ(st)+α([rt+γVπ(st+1)]−Vπ(st))
TD target = [ r t + γ V π ( s t + 1 ) ] [r_t+\gamma V^\pi(s_{t+1})] [rt+γVπ(st+1)]
请注意,这里没有求和,我们是采样,所以上面的式子里只有一个下一个状态,而不是所有的未来状态。而且像动态规划那样,我们会使用先前的 V π V^\pi Vπ估计。所以你可以把式子左边的 V π ( s t ) V^\pi(s_t) Vπ(st)写成 V k + 1 π ( s t ) V_{k+1}^\pi(s_t) Vk+1π(st),右边的 V π ( s t ) V^\pi(s_t) Vπ(st)写成 V k π ( s t ) V_{k}^\pi(s_t) Vkπ(st)。和动态规划的区别在于,动态规划相当于更新了整个价值函数,这里相当于仅更新了价值函数的一个项。 - TD error:
δ t = r t + γ V π ( s t + 1 ) − V π ( s t ) \delta_t = r_t + \gamma V^\pi(s_{t+1})-V^\pi(s_t) δt=rt+γVπ(st+1)−Vπ(st)
V π ( s t ) ≈ V^\pi(s_t) \approx Vπ(st)≈下一个状态 s ′ s' s′上的期望 - 可以在一次状态变迁(s,a,r,s’)发生后立即更新价值估计
- 不要求必须是可重复情景
Temporal Difference [TD(0)] Learning Algorithm
Input:
α
\alpha
α
Initialize
V
π
=
0
,
∀
s
∈
S
V^\pi=0, \forall s \in S
Vπ=0,∀s∈S
Loop
- Sample tuple ( s t , a t , r t , s t + 1 ) (s_t, a_t, r_t, s_{t+1}) (st,at,rt,st+1)
-
V
π
(
s
t
)
=
V
π
(
s
t
)
+
α
(
[
r
t
+
γ
V
π
(
s
t
+
1
]
−
V
π
(
s
t
)
)
V^\pi(s_t)=V^\pi(s_t) + \alpha([r_t+\gamma V^\pi(s_{t+1}]-V^\pi(s_t))
Vπ(st)=Vπ(st)+α([rt+γVπ(st+1]−Vπ(st))
TD target = [ r t + γ V π ( s t + 1 ) ] [r_t+\gamma V^\pi(s_{t+1})] [rt+γVπ(st+1)]
α \alpha α可以是一个时间的函数, a t a_t at是 π ( s t ) \pi(s_t) π(st),因为遵循策略 π \pi π。
例题
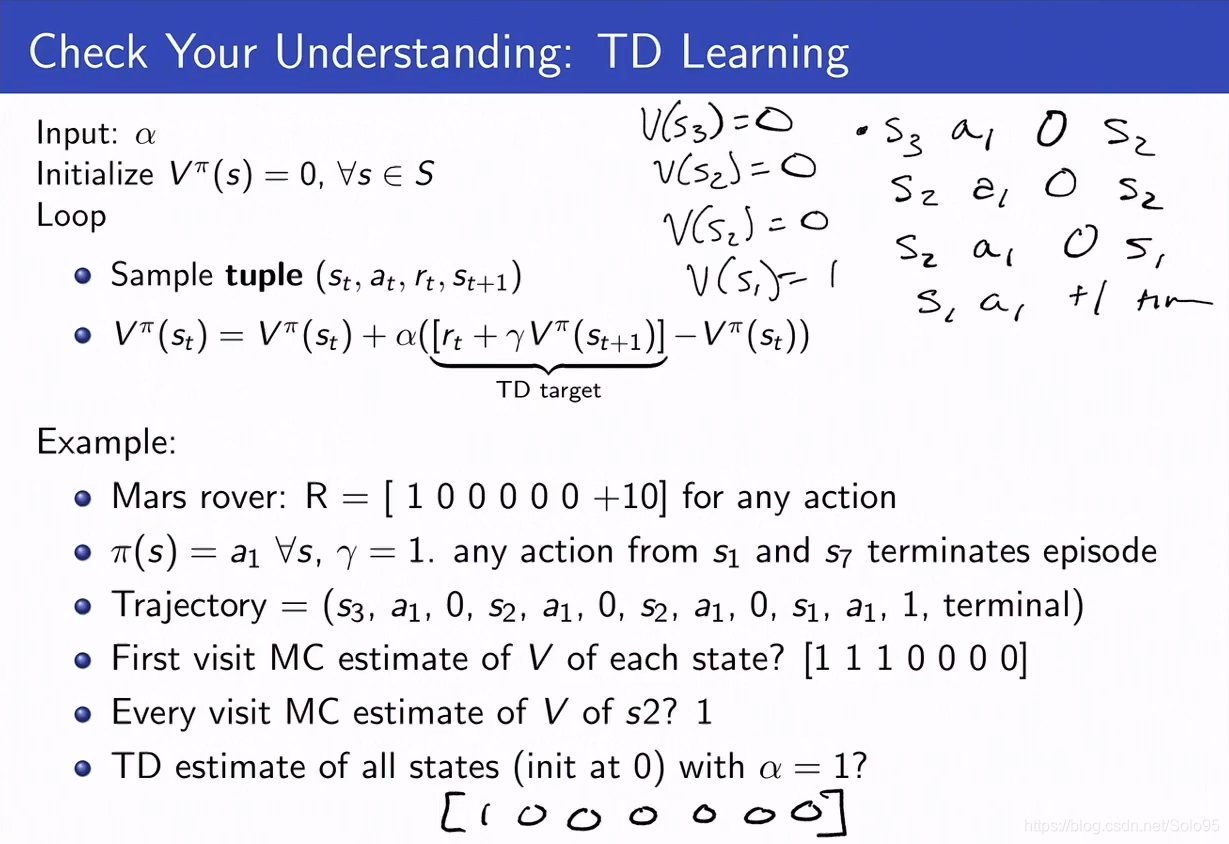
手写体是解题过程。
与蒙特·卡罗尔算法不同的是,我们不会再将回报反向传播到之前访问过的状态,而是采样一个四元组
(
s
,
a
,
r
,
s
′
)
(s,a,r,s')
(s,a,r,s′)即一次变迁,更新
V
(
s
)
V(s)
V(s)的状态,之后不记录这次采样,也不会再改变
s
s
s的价值
V
(
s
)
V(s)
V(s)。
结果是按照手写体以如下顺序生成的(初始化所有状态的价值为零):
- [0 0 0 0 0 0 0]
- [0 0 0 0 0 0 0]
- [0 0 0 0 0 0 0]
- [1 0 0 0 0 0 0]
最后一次采样得到 ( s 1 , a 1 , 1 , # ) (s_1,a_1,1,\#) (s1,a1,1,#),按照TD[(0)]算法更新步骤算, V ( s 1 ) = 1 V(s_1) = 1 V(s1)=1,其余由于更新它们价值时回报都是0,所以 V ( s ) = 0 ( e x c e p t f o r s 1 ) V(s)=0(except \ for \ s_1) V(s)=0(except for s1)。
TD Learning和Q-Learing高度相似。Q-Learning是在做对模型的控制,即求解最佳策略;TD-Learning基本上就是Q-Learning,但是你的策略是固定的。
实际中如果你取 α = 1 N \alpha=\frac{1}{N} α=N1或者其他类似的形式,或者取一个很小的值,那么它将必定收敛,当你像上面的例题那样取 α = 1 \alpha=1 α=1,它绝对会震荡。 α = 1 \alpha=1 α=1其实意味着你直接忽视掉了先前的估计。
图形化描述
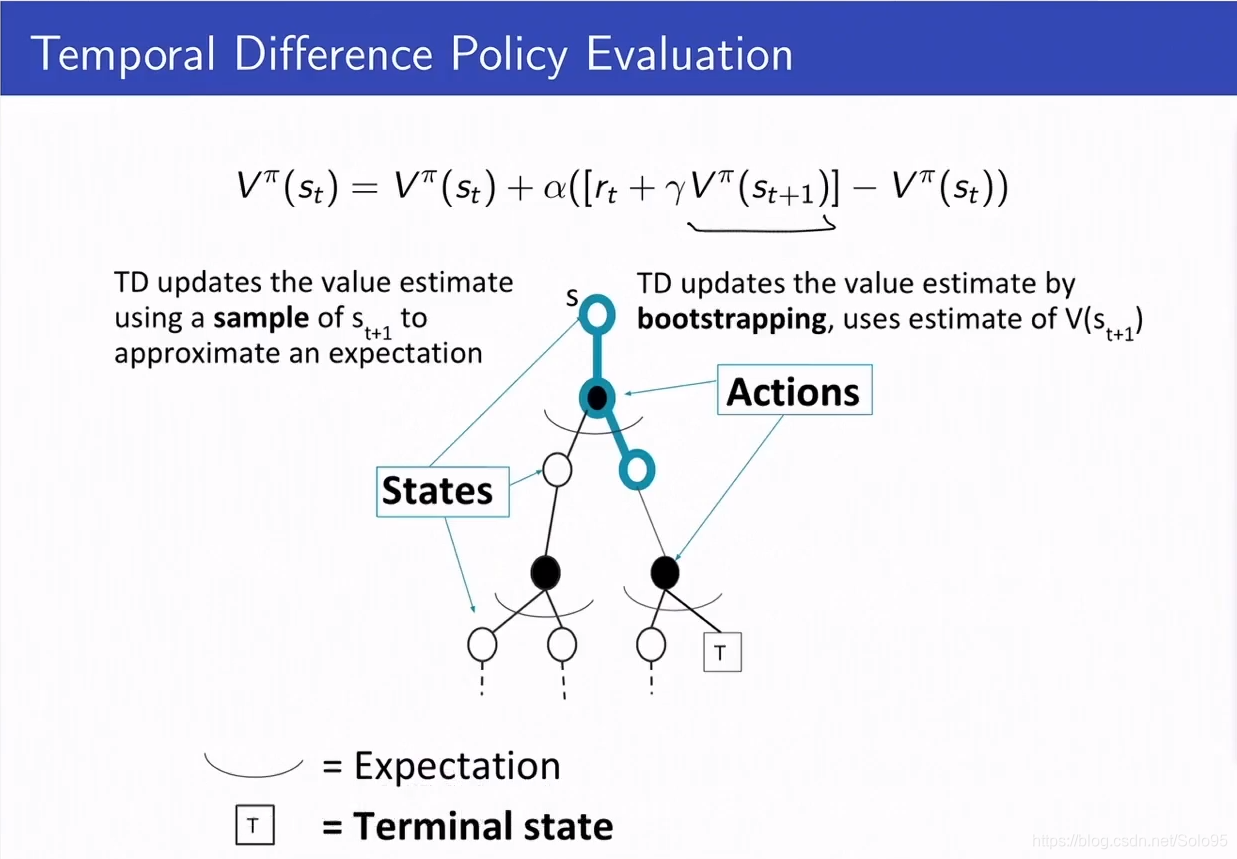
TD是蒙特·卡罗尔和动态规划的结合。因为,一方面它靠采样
s
t
+
1
s_{t+1}
st+1来近似期望,而不是显式地求期望(蒙特·卡罗尔方法的思想);另一方面它使用
V
(
s
t
+
1
)
V(s_{t+1})
V(st+1)通过bootstrap的方式更新价值估计(动态规划的思想)。

