基于阈值的图像分割方法
1. 直方图双峰法(mode 法)
Prewitt 等人于六十年代中期提出的直方图双峰法(也称 mode 法) 是典型的全局单阈值分割方法。该方法的基本思想是:假设图像中有明显的目标和背景,则其灰度直方图呈双峰分布,当灰度级直方图具有双峰特性时,选取两峰之间的谷对应的灰度级作为阈值。如果背景的灰度值在整个图像中可以合理地看作为恒定,而且所有物体与背景都具有几乎相同的对比度,那么,选择一个正确的、固定的全局阈值会有较好的效果。例如图4.1所示:

图4.1原始灰度图像
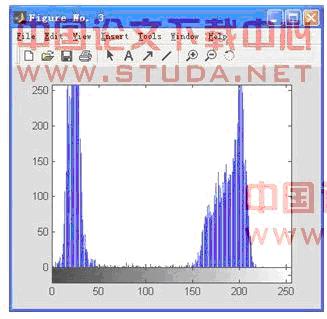
图4.2灰度直方图
选定阈值M为100
算法实现:找到第一个峰值和第二个峰值, 再找到第一和第二个峰值之间的谷值,谷值就是那个阀值了。
2. 固定阈值分割
就是设定一个固定的值, 像素灰度大于就该像素编程0或者255或者其他的,小于的又等于什么的。
1 for (int i = 0; i < nWidth; ++i) 2 { 3 for (int j = 0; j < nHigh; ++j) 4 { 5 if (Image[i][j] >= 阈值) 6 { 7 Image[i][j] = 255; 8 } 9 else 10 { 11 Image[i][j] = 0; 12 } 13 } 14 }
这个阈值选什么值呢, 1中的双峰法就是一个阈值产生的方法。
3. 半阈值分割
1 for (j = 0; j < height; j++) 2 { 3 for (i = 0; i < wide; i++) 4 { 5 lpSrc = p_data + wide*j + i; 6 lpDst = temp + wide*j + i; 7 8 if ((*lpSrc - 阈值) < 30) 9 *lpDst = *lpSrc; 10 else 11 *lpDst = 255; 12 } 13 }
不知道为什么这么做, 为什么这样就叫做半阈值?
4. 迭代阈值图像分割
http://topic.csdn.net/u/20080402/10/d3cb6789-fa60-4758-b232-7a89926f07b9.html
迭代法是基于逼近的思想,其步骤如下:
1. 求出图象的最大灰度值和最小灰度值,分别记为ZMAX和ZMIN,令初始阈值T0=(ZMAX+ZMIN)/2;
2. 根据阈值TK将图象分割为前景和背景,分别求出两者的平均灰度值ZO和ZB
3. 求出新阈值TK+1=(ZO+ZB)/2;
4. 若TK==TK+1,则所得即为阈值;否则转2,迭代计算。
我想问下,ZO和ZB怎么求??
1. 统计图像灰度直方图
2. 找到最大灰度值ZMAX和最小灰度值ZMIN,并计算T0 =(ZMAX+ZMIN)/2
3. 计算小于T0的所有灰度的均值ZO和大于T0的所有灰度的均值ZB(用直方图求就可以)。
例如,你的直方图从10到250有值,则T0 = 260/2 = 130.
1 ZO = Sum(nHist[i] * i) / Sum(nHist[i]); 10 <= i <= 130 2 BO = Sum(nHist[i] * i) / Sum(nHist[i]); 131 <= i <= 250
/////////////////////////////////////////////////////////////////////////////////////////////////////////////////
1 ZO = .0, ZB = .0; 2 int nB = 0, nO = 0; 3 BYTE bytVal = 0; 4 5 while (还有图像数据没读完) 6 { 7 bytVal = ReadNextPixel(); 8 if (bytVal > T0) 9 { 10 ZB += bytVal; 11 ++nB; 12 } 13 else 14 { 15 ZO += bytVal; 16 ++nO; 17 } 18 } 19 ZO /= nO; 20 ZB /= nB;
//////////////////////////////////////////////////////////////////////////////////////////////////////////
伪代码1
A. 找到灰度图中最大灰度nZmax和最小灰度nZmin(代码略)
B. 求T0。
1 T0 = (nZmax + nZmin) / 2;
C. 迭代了求出阈值
1 int i; 2 while (true) 3 { 4 // 计算下一个迭代阀值 5 for (i = 0; i < T0 + 1; i++) 6 { 7 Temp0 += tongji[i] * i; 8 Temp1 += tongji[i]; 9 } 10 for (i = T0 + 1; i < 256; i++) 11 { 12 Temp2 += tongji[i] * i; 13 Temp3 += tongji[i]; 14 } 15 // (大于T0的灰度均值 + 小于T0的灰度均值) / 2 16 T2 = (Temp0 / Temp1 + Temp2 / Temp3) / 2; 17 // 看迭代结果是否已收敛 18 if (T0 == T2) 19 break; 20 else 21 T0 = T2; 22 }
D. 根据上一步求到的T2阈值进行图像分割
1 // 对各像素进行灰度转换 2 // 对各像素进行灰度转换 3 for (j = 0; j < height; j ++) 4 { 5 for (i = 0; i < wide; i ++) 6 { 7 // 读取像素 8 unsigned char temp = *((unsigned char *)p_data + wide * j + i); 9 // 判断像素灰度值是否超出范围 10 if (temp < T0) 11 temp = 0; 12 else 13 temp = 255; 14 // 回写处理完的像素 15 *((unsigned char *)p_data + wide * j + i) = temp; 16 } 17 }
//////////////////////////////////////////////////////////////////////////////////////////////////////////
伪代码2
C. 找到灰度图中最大灰度iMaxGrayValue和最小灰度iMinGrayValue (代码略)
D.求iNewThreshold。
iNewThreshold = (iMaxGrayValue + iMinGrayValue) / 2;
C. 迭代了求出阈值
1 //迭代求最佳阈值 2 iNewThreshold = (iMinGrayValue + iMaxGrayValue)/2; 3 iThreshold = 0; 4 for(iIterationTimes = 0; iThreshold != iNewThreshold && iIterationTimes < 100;iIterationTimes ++) 5 { 6 iThreshold = iNewThreshold; 7 lP1 =0; 8 lP2 =0; 9 lS1 = 0; 10 lS2 = 0; 11 //求两个区域的灰度平均值 12 for (i = iMinGrayValue;i < iThreshold;i++) 13 { 14 lP1 += lHistogram[i]*i; 15 lS1 += lHistogram[i]; 16 } 17 iMean1GrayValue = (unsigned char)(lP1 / lS1); 18 for (i = iThreshold+1;i < iMaxGrayValue;i++) 19 { 20 lP2 += lHistogram[i]*i; 21 lS2 += lHistogram[i]; 22 } 23 iMean2GrayValue = (unsigned char)(lP2 / lS2); 24 iNewThreshold = (iMean1GrayValue + iMean2GrayValue)/2; 25 }
// 这里限制的迭代次数不大于100,考虑到效率吧。
D. 根据上一步求到的iNewThreshold阈值进行图像分割
1 //根据阈值将图像二值化 2 for (i = 0;i < lHeight ;i++) 3 { 4 for(j = 0;j < lWidth ;j++) 5 { 6 // 指向源图像倒数第j行,第i个象素的指针 7 lpSrc = (char *)lpDIBBits + lLineBytes *i + j; 8 9 // 指向目标图像倒数第j行,第i个象素的指针 10 lpDst = (char *)lpNewDIBBits + lLineBytes *i + j; 11 12 pixel = (unsigned char)*lpSrc; 13 14 if(pixel <= iThreshold) 15 { 16 *lpDst = (unsigned char)0; 17 } 18 else 19 { 20 *lpDst = (unsigned char)255; 21 } 22 } 23 }
5. 自适应阈值图像分割
在许多情况下,物体和背景的对比度在图象中不是各处一样的,这时很难用统一的一个阈值将物体与背景分开。这时可以根据图象的局部特征分别采用不同的阈值进行分割。实际处理时,需要按照具体问题将图象分成若干子区域分别选择阈值,或者动态地根据一定的邻域范围选择每点处的阈值,进行图象分割。
1). 大津法(OTSU)
最大类间方差法是由日本学者大津于1979年提出的,是一种自适应的阈值确定的方法,又叫大津
法,简称OTSU。它是按图像的灰度特性,将图像分成背景和目标2部分。背景和目标之间的类间方差
越大,说明构成图像的2部分的差别越大,当部分目标错分为背景或部分背景错分为目标都会导致2部
分差别变小。因此,使类间方差最大的分割意味着错分概率最小。
对于图像I(x,y),前景(即目标)和背景的分割阈值记作T, 属于前景的像素点数占整幅图像的比例记为ω0,其平均灰度μ0;背景像素点数占整幅图像的比例为ω1,其平均灰度为μ1。图像的总平均灰度记为μ,类间方差记为g。
假设图像的背景较暗,并且图像的大小为M×N,
图像中像素的灰度值小于阈值T的像素个数记作N0,像素灰度大于阈值T的像素个数记作N1,则有:
1 ω0 = N0/ M×N (1) 2 ω1 = N1/ M×N (2) 3 N0 + N1 = M×N (3) 4 ω0 + ω1 = 1 (4) 5 μ= ω0 * μ0 + ω1 * μ1 (5) 6 g = ω0 (μ0 -μ) ^ 2 + ω1 (μ1 - μ)^2 (6)
将式(5)代入式(6),得到等价公式:
1 g = ω0 ω1 (μ0 - μ1) ^ 2 (7)
采用遍历的方法得到使类间方差最大的阈值T,即为所求。
Otus算法使用的是聚类的思想,即把图像的灰度数按灰度级分成2个部分,使2个部分的之间的灰度值差异最大,每个部分之内的灰度差异最小的,找到这样的一个灰度级t划分。通过方差的计算实现,即方差最小的值对应的t即是理想的划分。
http://hi.baidu.com/cwynamespace/blog/item/896ed529955c61f998250a47.html
伪代码1)
1 FLOAT result; 2 3 int cnt0; 4 int cnt1; 5 FLOAT max=0.0; 6 for (thre = 1; thre < 255; thre++) 7 { 8 cnt0=0; 9 cnt1=0; 10 pixeltotalC0=0.0; 11 pixeltotalC1=0.0; 12 // 计算背景与目标的像素数各是多少 13 // 计算背景与目标的像素值总和各是多少 14 for (i=0; i<lHeight; i++) 15 { 16 for (j=0; j<lWidth; j++) 17 { 18 if (ImageSrc[i][j] <= thre) 19 { 20 cnt0++; 21 pixeltotalC0 += ImageSrc[i][j]; 22 } 23 else 24 { 25 cnt1++; 26 pixeltotalC1 += ImageSrc[i][j]; 27 } 28 } 29 } 30 cnt0=cnt0; 31 cnt1=cnt1; 32 33 rateC0 = 1.0 * cnt0 / (lHeight * lWidth); // 计算背景的面积比例 34 rateC1 = 1 - rateC0; // 计算目标的面积比例 35 36 // 计算背景平均灰度 37 if (cnt0 != 0) 38 { 39 pixelaverC0 = pixeltotalC0 / cnt0; 40 } 41 else 42 { 43 pixelaverC0 = 0; 44 } 45 46 // 计算目标平均灰度 47 if (cnt1 !=0) 48 { 49 pixelaverC1 = pixeltotalC1 / cnt1; 50 } 51 else 52 { 53 pixelaverC1 = 0; 54 } 55 56 // 计算类间方差 57 result = rateC0 * rateC1 * (pixelaverC0 - pixelaverC1) * (pixelaverC0 - pixelaverC1); 58 59 // 找到最大的类间方差, 就找到最佳的阈值了 60 if(result > max) 61 { 62 max = result; 63 threbest = thre; 64 } 65 } 66 67 // 进行二值化 68 for (i=0; i<lHeight; i++) 69 { 70 for (j=0; j<lWidth; j++) 71 { 72 if (ImageSrc[i][j] >= threbest) 73 { 74 ImageDst[i][j] = (unsigned char)255; 75 } 76 else 77 { 78 ImageDst[i][j] = (unsigned char)0; 79 } 80 } 81 }
明显这段代码的效率会低一点,它是怎对每一个灰度值在图像中的所有点进行计算。
看下面代码,效率会高一点。
伪代码2)
http://fcwhx007.bokewu.com/blog173376.htm
1 /* 2 OTSU 算法可以说是自适应计算单阈值(用来转换灰度图像为二值图像)的简单高效方法。下面的代码最早由 Ryan Dibble提供,此后经过多人Joerg.Schulenburg, R.Z.Liu 等修改,补正。 3 算法对输入的灰度图像的直方图进行分析,将直方图分成两个部分,使得两部分之间的距离最大。划分点就是求得的阈值。 4 parameter: *image --- buffer for image 5 rows, cols --- size of image 6 x0, y0, dx, dy --- region of vector used for computing threshold 7 vvv --- debug option, is 0, no debug information outputed 8 */ 9 /*======================================================================*/ 10 /* OTSU global thresholding routine */ 11 /* takes a 2D unsigned char array pointer, number of rows, and */ 12 /* number of cols in the array. returns the value of the threshold */ 13 /*======================================================================*/ 14 // 这段代码可以针对图像的区域 15 int otsu (unsigned char *image, int rows, int cols, int x0, int y0, int dx, int dy) 16 { 17 unsigned char *np; // 图像指针 18 int thresholdValue=1; // 阈值 19 int ihist[256]; // 图像直方图,个点 20 21 int i, j, k; // various counters 22 int n, n1, n2, gmin, gmax; 23 double m1, m2, sum, csum, fmax, sb; 24 25 // 对直方图置零... 26 memset(ihist, 0, sizeof(ihist)); 27 28 gmin=255; gmax=0; 29 // 生成直方图 30 // 求出最大像素值和最小像素值 31 // 求出图像中各个灰度值的个数存于数组ihist中 32 for (i = y0 + 1; i < y0 + dy - 1; i++) 33 { 34 np = &image[i*cols+x0+1]; 35 for (j = x0 + 1; j < x0 + dx - 1; j++) 36 { 37 ihist[*np]++; 38 if(*np > gmax) gmax=*np; 39 if(*np < gmin) gmin=*np; 40 np++; /* next pixel */ 41 } 42 } 43 44 // set up everything 45 sum = csum = 0.0; 46 n = 0; 47 48 // 不知道这个有什么用? 49 for (k = 0; k <= 255; k++) 50 { 51 // 图像的总灰度值 52 sum += (double) k * (double) ihist[k]; /* x*f(x) 质量矩*/ 53 // 总像素点数? 不就是等于宽*高吗 54 n += ihist[k]; /* f(x) 质量*/ 55 } 56 57 if (!n) 58 { 59 // if n has no value, there is problems... 60 fprintf (stderr, "NOT NORMAL thresholdValue = 160/n"; 61 return (160); 62 } 63 64 // do the otsu global thresholding method 65 fmax = -1.0; 66 n1 = 0; 67 for (k = 0; k < 255; k++) 68 { 69 n1 += ihist[k]; 70 if (!n1) 71 { 72 continue; 73 } 74 n2 = n - n1; 75 if (n2 == 0) 76 { 77 break; 78 } 79 csum += (double) k *ihist[k]; 80 m1 = csum / n1; 81 m2 = (sum - csum) / n2; 82 sb = (double) n1 *(double) n2 *(m1 - m2) * (m1 - m2); 83 /* bbg: note: can be optimized. */ 84 if (sb > fmax) 85 { 86 fmax = sb; 87 thresholdValue = k; 88 } 89 } 90 // at this point we have our thresholding value 91 return(thresholdValue); 92 }
http://hi.baidu.com/flyingmooding/blog/item/a434e134e3139bd7a2cc2b63.html
2). 均值法
思想很简单,就是把图像分成m*n块子图,求取每一块子图的灰度均值(就是所有像素灰度值之和除以像素点的数量),这个均值就是阈值了。
这种方法明显不比大津法好,因为均值法和大津法都是从图像整体来考虑阈值的,但是大津法找了一个类间方差最大值来求出最佳阈值的;这两种方法子图越多应该分割效果会好一点,但效率可能会变慢。
6. 最佳阈值
阈值的选择需要根据具体问题来确定,一般通过实验来确定。对于给定的图象,可以通过分析直方图的方法确定最佳的阈值,例如当直方图明显呈现双峰情况时,可以选择两个峰值的中点作为最佳阈值。
所谓最佳阈值就是根据一定的方法(例如双峰法),找出图像中目标与背景的分割最佳阈值就是了。方法多种多样,对不同的图片可以有不同的方法(因为不同的图片有不同的特点)。方法是多种多样的,答案是丰富多彩的。
转自:http://blog.csdn.net/bagboy_taobao_com/article/details/5645425
附:OpenCv中实现了三种跟图像分割相关的算法(http://www.cnblogs.com/xrwang/archive/2010/02/28/ImageSegmentation.html)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号