
动态规划
1.动态规划概念与基本思想
动态规划(Dynamic Programming,DP)是运筹学的一个分支,是求解决策过程最优化的过程。20世纪50年代初,美国数学家贝尔曼(R.Bellman)等人在研究多阶段决策过程的优化问题时,提出了著名的最优化原理,从而创立了动态规划。动态规划的应用极其广泛,包括工程技术、经济、工业生产、军事以及自动化控制等领域,并在背包问题、生产经营问题、资金管理问题、资源分配问题、最短路径问题和复杂系统可靠性问题等中取得了显著的效果。动态规划算法通常用于求解具有某种最优性质的问题。在这类问题中,可能会有许多可行解。每一个解都对应于一个值,我们希望找到具有最优值的解。动态规划算法与分治法类似,其基本思想也是将待求解问题分解成若干个子问题,先求解子问题,然后从这些子问题的解得到原问题的解。
2.动态规划基本要素
最优子结构:如果一个问题满足最优性原理通常称此问题具有最优子结构性质。也就是问题的最优解包含其子问题的最优解。
重叠子问题:递归算法求解问题时,每次产生的子问题并不总是新问题,有些子问题被反复计算。这种性质称为子问题的重叠性质。动态规划算法避开了递归时,重复的计算相同子问题的过程,对每个子问题只解一次,而后将其保存在一个表格中,当再次需要的时候,只是简单的用常数时间查看一下结果。采用动态规划只需要多项式的时间,获得较高的解题效率。
备忘录方法:为避免相同的子问题的重复求解,采用备忘录方法为没格子问题建立一个记录项。动态规划采用自底向上的方式求解问题。求解每一级子问题的最优值填入备忘录。
3.多段图的最短路径问题
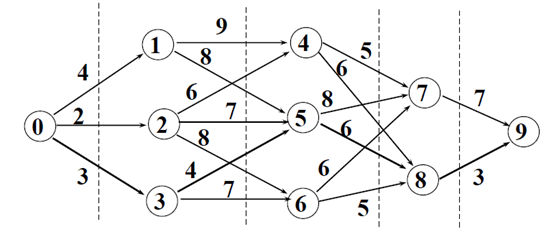
多段图的最短路径问题是求从源点到终点的最小代价路径。(关于多段图问题是满足最优性原理的。)
下面使用动态规划分析:
对多段图的边(u, v),用Cuv表示边上的权值,将从源点s到终点t的最短路径记为d(s, t),则从源点0到终点9的最短路径d(0, 9)由下式确定:
d(0, 9)=min{c01+d(1, 9), c02+d(2, 9), c03+d(3,9)}
d(0, 9)依赖于d(1,9)、d(2,9)、d(3,9) 而
d(1, 9)=min{c14+d(4, 9), c15+d(5, 9)}
d(2, 9)=min{c24+d(4, 9), c25+d(5, 9), c26+d(6, 9)}
d(3, 9)=min{c35+d(5, 9), c36+d(6, 9)}
这一阶段的决策又依赖于d(4, 9)、d(5, 9)和d(6, 9)
的计算结果:
d(4, 9)=min{c47+d(7, 9), c48+d(8, 9)}
d(5, 9)=min{c57+d(7, 9), c58+d(8, 9)}
d(6, 9)=min{c67+d(7, 9), c68+d(8, 9)}
这一阶段的决策依赖于d(7, 9)和d(8, 9)的计算,而d(7, 9)和d(8,9)可以直接获得(括号中给出了决策产生的状态转移):
d(7, 9)=c79=7(7→9)
d(8, 9)=c89=3(8→9)
再向前推导,有:
d(6, 9)=min{c67+d(7, 9), c68+d(8, 9)}=min{6+7, 5+3}=8(6→8)
d(5, 9)=min{c57+d(7, 9), c58+d(8, 9)}=min{8+7, 6+3}=9(5→8)
d(4, 9)=min{c47+d(7, 9), c48+d(8, 9)}=min{5+7, 6+3}=9(4→8)
d(3, 9)=min{c35+d(5, 9), c36+d(6, 9)}=min{4+9, 7+8}=13(3→5)
d(2, 9)=min{c24+d(4, 9), c25+d(5, 9), c26+d(6, 9)}=min{6+9,7+9, 8+8}=15(2→4)
d(1, 9)=min{c14+d(4, 9), c15+d(5, 9)}=min{9+9, 8+9}=17(1→5)
d(0, 9)=min{c01+d(1, 9), c02+d(2, 9), c03+d(3, 9)}=min{4+17,2+15, 3+13}=16(0→3)
最后,得到最短路径为0→3→5→8→9,长度为16。
下面考虑多段图的最短路径问题的填表形式。用一个数组cost[n]作为存储子问题解的表格,cost[i]表示从顶点i到终点n-1的最短路径,数组path[n]存储状态,
path[i]表示从顶点i到终点n-1的路径上顶点i的下一个顶点。则:
cost[i]=min{cij+cost[j]} (i≤j≤n且顶点j是顶点i的邻接点) (式1)
path[i]=使cij+cost[j]最小的j (式2)
伪算法如下:
1.初始化:数组cost[n]初始化,数组path[n]初始化;
2.for (i=n-2; i>=0; i--)
2.1 对顶点i的每一个邻接点j,根据式8.5计算cost[i];
2.2 根据式8.6计算path[i];
3.输出最短路径长度cost[0];
4. 输出最短路径经过的顶点:
4.1 i=0
4.2 循环直到path[i]=n-1
4.2.1 输出path[i];
4.2.2 i=path[i];
根据上面伪算法,列出每步的步骤:
初始化:path[0-9]=[-1,-1,-1,-1,-1,-1,-1,-1,-1];cost[0-9]=[0,0,0,0,0,0,0,0,0];
根据式子计算得到:
i=8时,cost[8]=3,path[8]=9
i=7时,cost[7]=7,path[7]=9
i=6时,cost[6]=8,path[6]=8
i=5时,cost[5]=9,path[5]=8
i=4时,cost[4]=12,path[4]=8
i=3时,cost[3]=13,path[3]=5
i=2时,cost[2]=16,path[2]=5
i=1时,cost[1]=17,path[1]=5
i=0时,cost[0]=16,path[0]=3
所以,最短路径应该为0-->3-->5-->8-->9,值为cost[0]的值16。
时间复杂度:第一部分是初始化部分,其时间性能为O(n);第二部分是依次计算各个顶点到终点的最短路径,由两层嵌套的循环组成,外层循环执行n-1次,内层循环对所有出边进行计算,并且在所有循环中,每条出边只计算一次。假定图的边数为m,则这部分的时间性能是O(m);第三部分是输出最短路径经过的顶点,其时间性能是O(n)。所以,算法的时间复杂性为O(n+m)。
4.最低费用问题
一个商人穿过一个 N*N 的正方形的网格,去参加一个非常重要的商务活动。他要从网格的左上角进,右下角出。每穿越中间1个小方格,都要花费1个单位时间。商人必须在(2N-1)个单位时间穿越出去。而在经过中间的每个小方格时,都需要缴纳一定的费用。
这个商人期望在规定时间内用最少费用穿越出去。请问至少需要多少费用?
代码:
#include <iostream>
#include <cstdio>
using namespace std;
#include <cstdlib>
#define M 101
#define n 4
int f[M][M], a[M][M];
int main()
{
int max=5,min=1;
int x_p,y_p;
int m=n,u=n;
int path[n+1][n+1][2];//用来存储(i,j)的前一个点坐标分别是[i][j][0]与[i][j][1],n+1表示不使用0下标,用1~n与实际坐标保持一致
for(int x = 1; x <= n; x++)
{
for(int y = 1; y <= n; y++)
{
a[x][y]= rand() % (max - min) + min;
if(x == 1) {f[x][y] = a[x][y] + f[x][y-1];}//初始化1行
if(y == 1) {f[x][y] = a[x][y] + f[x-1][y];}//初始化1列
}
}
for(int k1=1;k1<=n;k1++)
{
for(int k2=1;k2<=n;k2++)
{
printf("%d ",a[k1][k2]);
}
printf("\n");
}
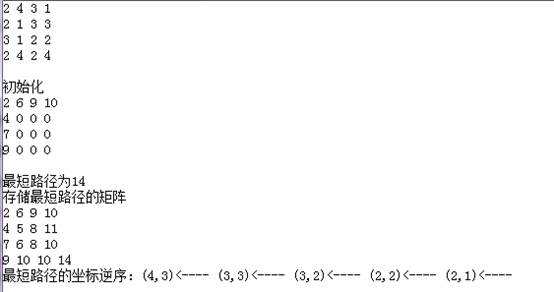
printf("\n");
printf("初始化\n");
for(int t1=1;t1<=n;t1++)
{
for(int t2=1;t2<=n;t2++)
{
printf("%d ",f[t1][t2]);
}
printf("\n");
}
printf("\n");
for(int i = 2; i <= n; i++)
{
for(int j = 2; j <= n; j++)
{
f[i][j] =((f[i-1][j]<f[i][j-1])?f[i-1][j]:f[i][j-1]) + a[i][j];//f[i][j]最小值由上一行或前一列得来
if(f[i-1][j]<f[i][j-1])
{
path[i][j][0]=i-1;
path[i][j][1]=j;
}else{
path[i][j][0]=i;
path[i][j][1]=j-1;
}
}
}
printf("最短路径为%d\n", f[n][n]);
printf("存储最短路径的矩阵\n");
for(int a = 1; a <= n; a++)
{
for(int b = 1; b <= n; b++)
{
printf("%d ",f[a][b]);
}
printf("\n");
}
printf("最短路径的坐标逆序:");
while(m>1&&u>1)//自底向上输出路径坐标
{
x_p=path[m][u][0];
y_p=path[m][u][1];
printf("(%d,", x_p);
printf("%d)<---- ",y_p);
m=x_p;
u=y_p;
}
return 0;
}
所以最后的路径应该为如下图:
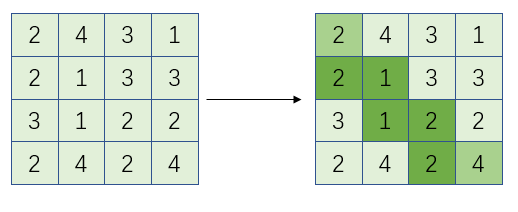
总结:动态规划法将待求解问题分解成若干个相互重叠的子问题,每个子问题对应决策过程的一个阶段,一般来说,子问题的重叠关系表现在对给定问题求解的递推关系(也就是动态规划函数)中,将子问题的解求解一次并填入表中,当需要再次求解此子问题时,可以通过查表获得该子问题的解而不用再次求解,从而避免了大量重复计算。
参考链接:https://www.cnblogs.com/xing901022/archive/2012/10/16/2726820.html
不足或错误之处,欢迎指正与评价!

 浙公网安备 33010602011771号
浙公网安备 33010602011771号