DDT: deep descriptor transform 论文解析
论文参考链接:https://arxiv.org/abs/1705.02758
主要思想
提出了一种利用预训练模型(Imagenet Pretrained)来做解决目标共定位(object co-localization)问题。目标共定位即给定一个图像集,这个图像集中大部分图像区域都是某一个物体如飞机,则将所有飞机的区域定位出来(bounding box)。如下图所示为该论文的pipeline,整个过程是无监督的,即随便给定一个图像集,它主要包含某一类物体,算法可以将图像集中该类目标全部进行定位出来。
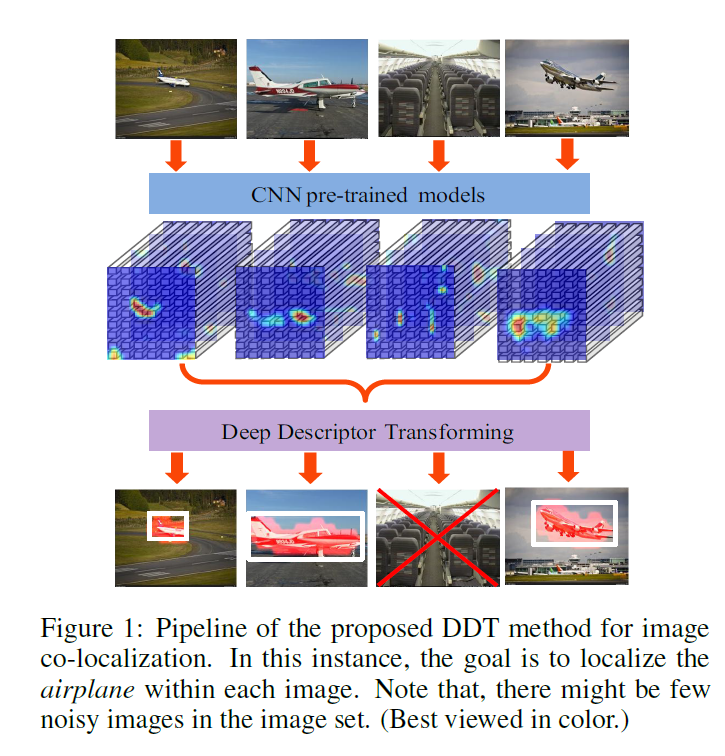
论文的主要贡献是提出了DDT模块,利用该模块可以实现无监督的目标共定位。
DDT模块
图像集{\({ I_1, I_2, ... , I_n }\)},经过CNN后得到该集合的特征向量\(D_{set}\),其shape: \((n, w, h, c)\),这里我们假设图像集的所有图像大小相同,n代表图像集的图像数量,\(w\),\(h\)分别代表特征图的宽和高,\(c\)代表特征图的通道维数。将\(D_{set}\) reshape 成 \((n*w*h, c)\)的张量并对其进行均值归0处理,得到\(D_{reshpae}\),表示具有\(n*w*h\)个长度为\(n\)的特征向量。
对\(D_{reshape}\)进行PCA降维, 取最大特征值对应的特征向量作为基向量\(\xi_{1}\),\(\xi_{1} \in R^c\)。
计算整个图像集在\(\xi_{1}\)上的投影:
将\(P_{set}\) reshape回单张图像得到{\(P_1, P_2, ... , P_n\)},则\(P_i\)大于0的区域即为co-location,在进行后续的postprocessing就可以得到最终的bounding box了。
理解
PCA找出最大的特征值对应的特征向量,将图像的特征投影到该方向,如果值为正说明是正相关的,即图像集的共性被找到了,这个共性的区域就是co-location。PCA的理解可以参考这个博客,这里不再赘述。
实验结果
评价指标CorLoc
we take the correct localization (CorLoc) metric for evaluating the proposed method. CorLoc is defined as the percentage of images correctly localized according to the PASCAL-criterion.
即根据PASCAL的IOU标准(IOU>0.5)正确定位的图像数量占总共的图像数量的百分比。
数据集
作者在三个数据即上进行了实验以下给出三个数据集的基本信息:
- Object Discovery dataset 连接:有三个类别,car, plane, horse; 每张图一个目标,有部分图是没有目标的; 每次处理的图像集大小为100.
- PASCAL VOC (07,12):使用trainval上的数据。对于大目标如飞机,基本上是一个目标一个图,背景简单;但是小目标如cup,背景复杂可能有多个不同类别目标同时出现一个图。
- ImageNet Subsets:不包含Imagenet训练集中的类别,用此来说明模型的泛化能力。
实验结果
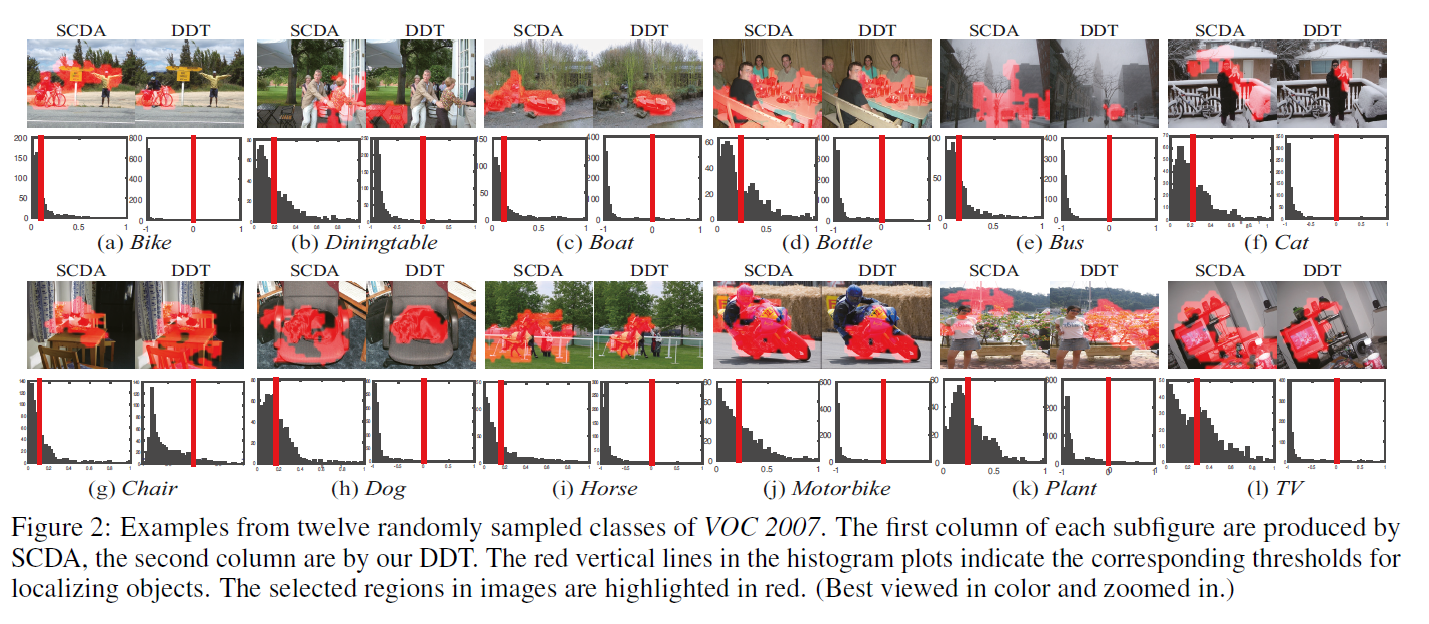
可以看到SCDA的方法结果也不错,因为该数据集是一个目标一张图,所以这种方法也取得了不错结果
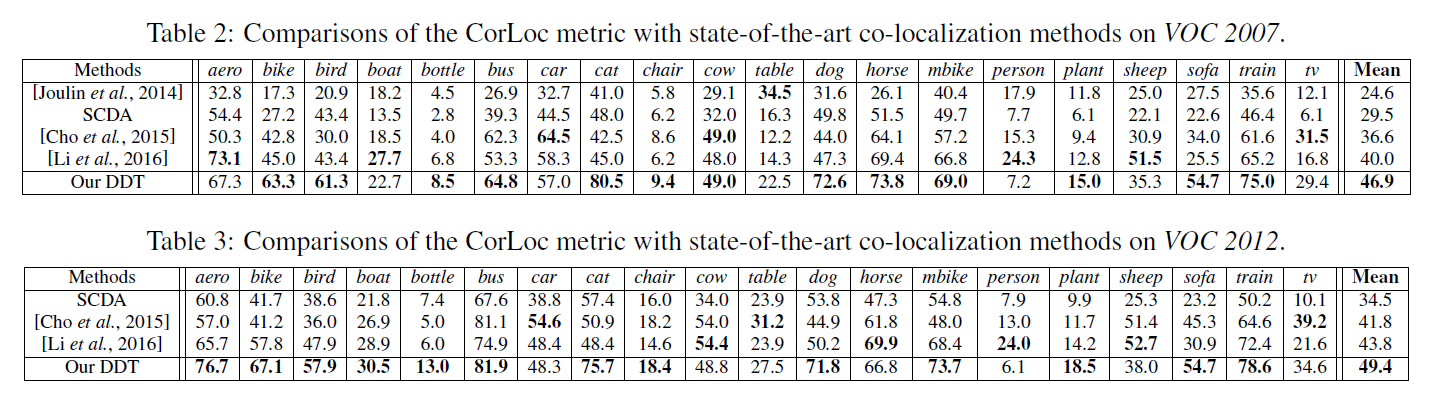
两个VOC数据集上的结果,可以看到大物体的结果较好,而小物体如cup的结果较差。
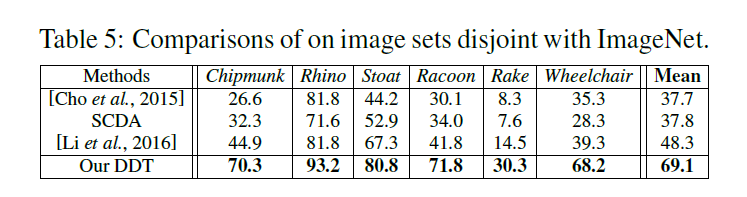
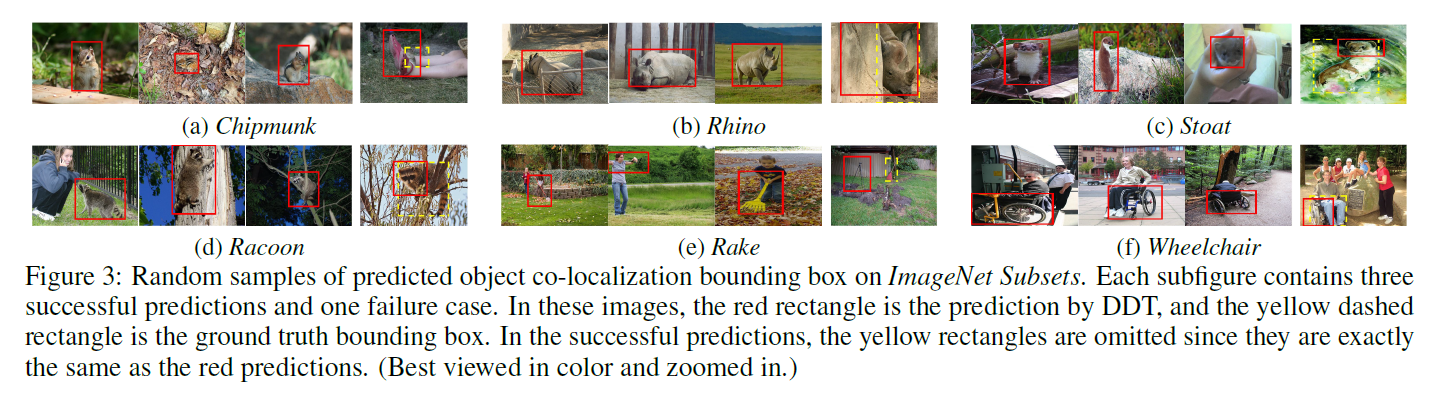
这是在ImaeNet Subsets上的结果,算法也取得了比较不错的结果。

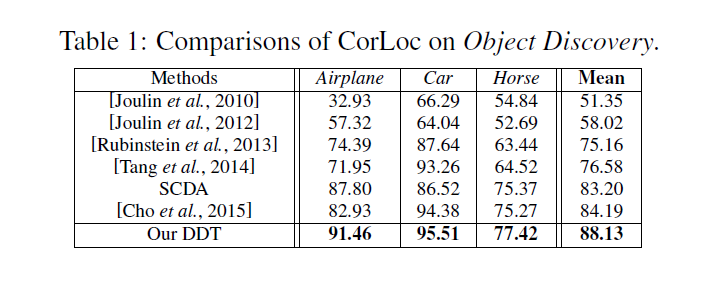
这是与半监督学习算法的结果的对比,算法也获得了 competitive 的结果。
量化结果