Lidar Camera fusion slam
Enhanced Visual Loop Closing for Laser-Based SLAM
文章通过融合3D-Lidar 的 LOAM 方法与ORB SLAM的回环检测方法,提升了LOAM的建图效果,主要思想是:
(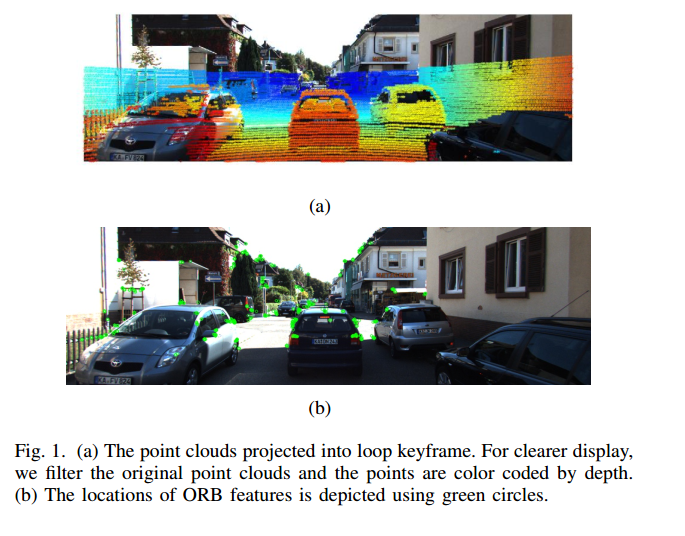
点云匹配-》关键帧检测-》点云投影-》ORB特征3D位姿提取,计算相对位姿-》回环图优化。
文章通过融合3D-Lidar 的 LOAM 方法与ORB SLAM的回环检测方法,提升了LOAM的建图效果,主要思想是:
(
点云匹配-》关键帧检测-》点云投影-》ORB特征3D位姿提取,计算相对位姿-》回环图优化。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号