A*寻路算法
一种用于寻找有效路径的算法。
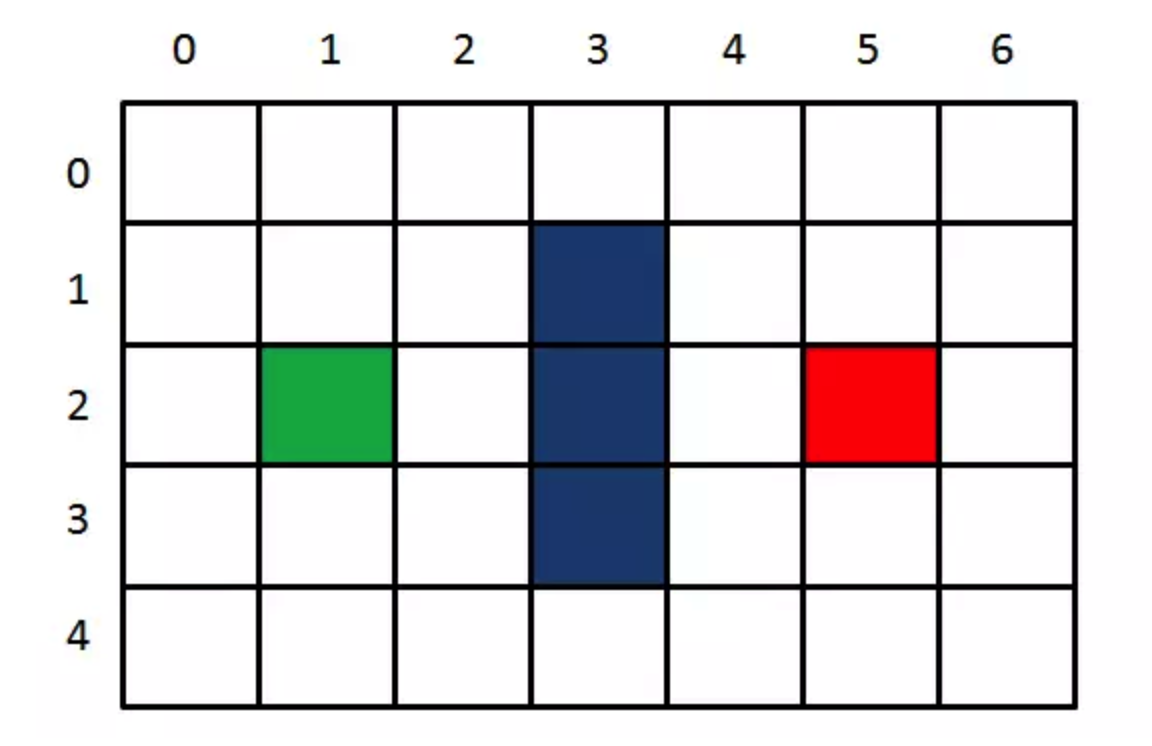
一个7×5大小的迷宫,绿色的格子是起点,红色格子是终点,中间三个蓝色格子是墙。这里对于A*寻路的描述做了很大的简化。实际场景中可能会遇到斜向移动、特殊地形等等因素,有些时候需要对OpenList中的方格进行重新标记。
游戏的规则是从起点开始,每一步只能上下左右移动一格,且不能穿越墙壁。如何让AI用最少的步数到达终点?
引入两个集合和一个公式:
OpenList:可到达的格子
CloseList:已到达的格子
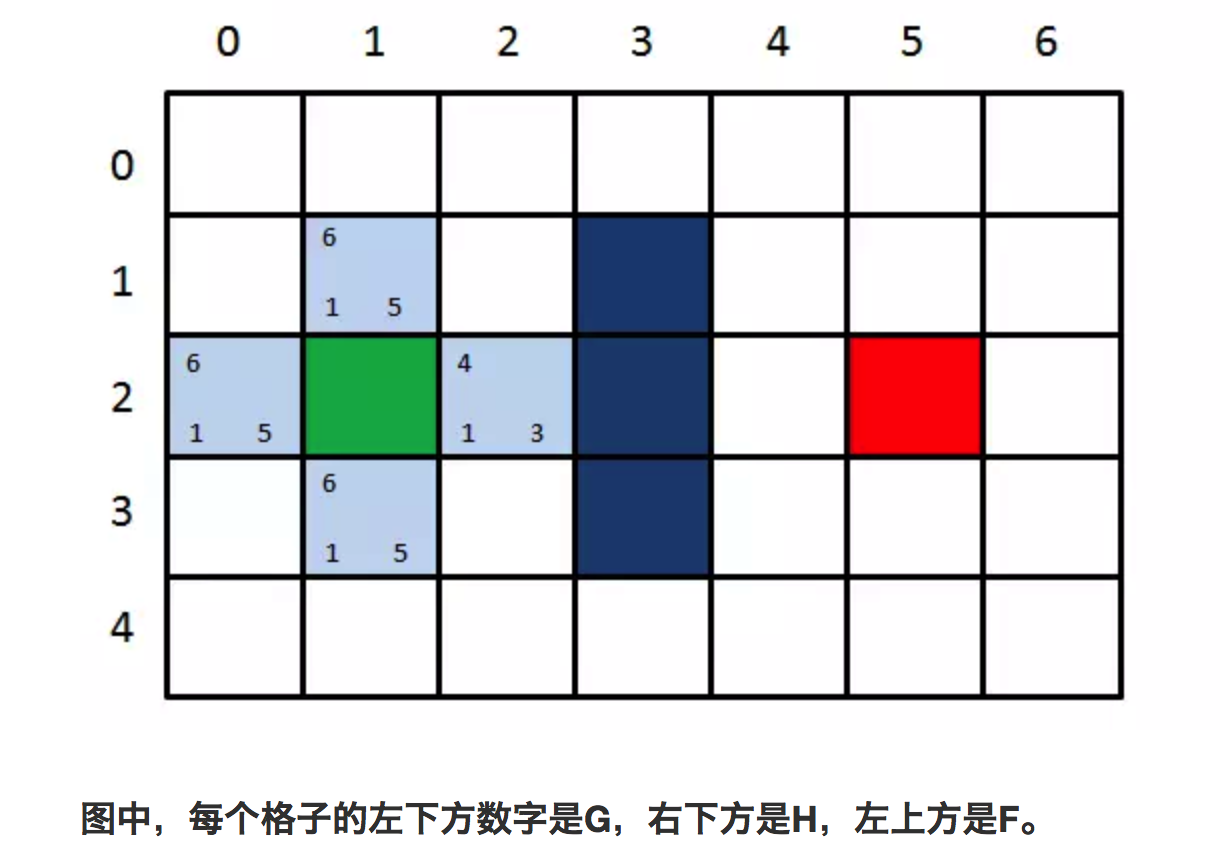
F=G+H :对格子价值的评估,其中G代表从起点走到当前格的成本,也就是走了多少步,H代表从当前格走到目标格的距离(不考虑障碍)。F值越小越好。
第一步:把起点放入OpenList
OpenList:Node(1,2)
第二步:找出OpenList中F值最小的方格,即唯一的方格Node(1,2)作为当前方格,并把当前格移出OpenList,放入CloseList。代表这个格子已到达并检查过了。
CloseList:Node(1,2)
第三步:找出当前格上下左右所有可到达的格子,看它们是否在OpenList当中。如果不在,加入OpenList,计算出相应的G、H、F值,并把当前格子作为它们的“父亲节点”(为了确定最终路线)。
OpenList:Node(1,1) Node(0,2) Node(2,2) Node(1,3)
CloseList:Node(1,2)
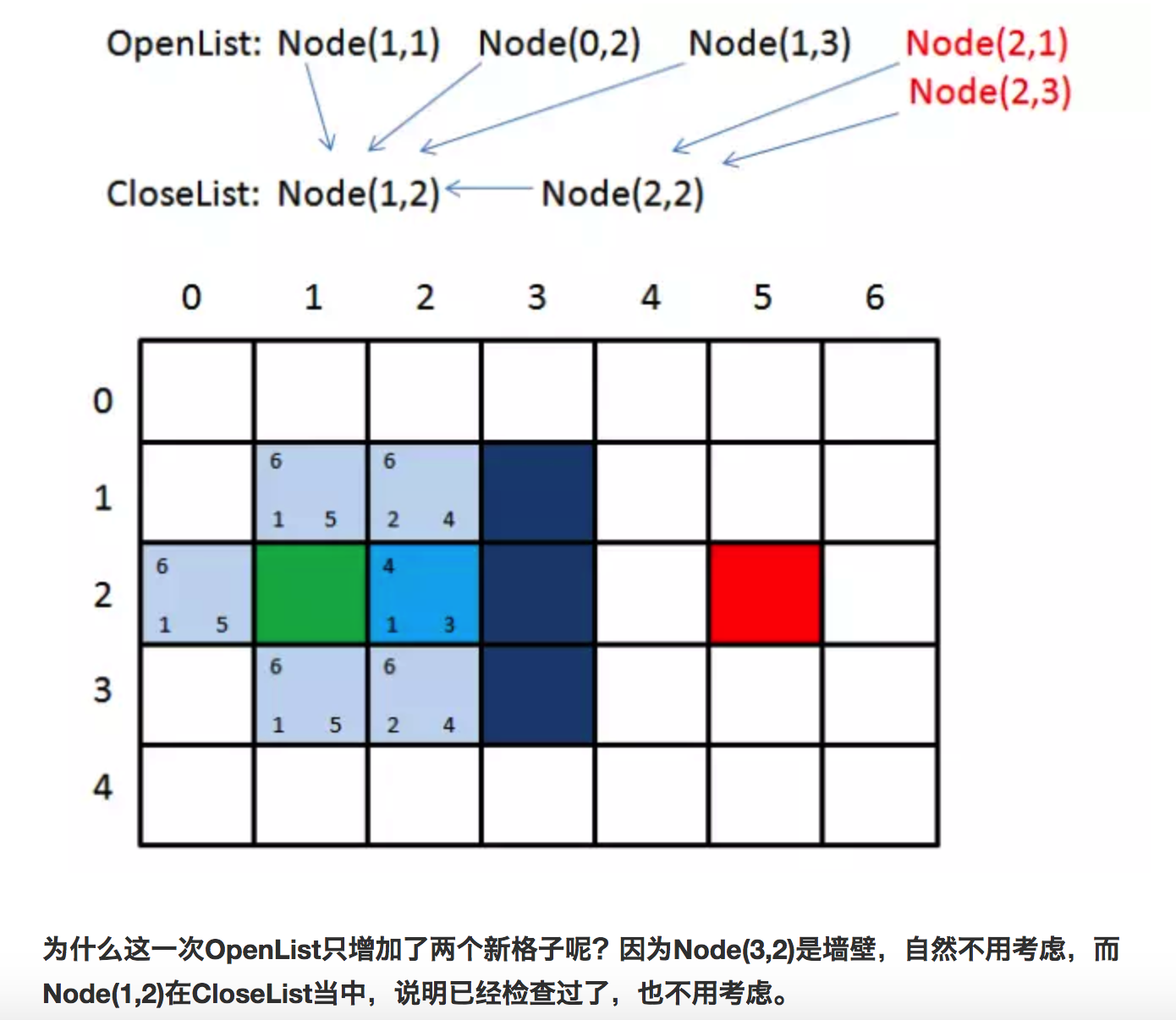
Round1 ~ 第一步:找出OpenList中F值最小的方格,即方格Node(2,2)作为当前方格,并把当前格移出OpenList,放入CloseList。代表这个格子已到达并检查过了。
OpenList:Node(1,1) Node(0,2) Node(1,3)
CloseList:Node(1,2) Node(2,2)
Round2 ~ 第二步:找出当前格上下左右所有可到达的格子,看它们是否在OpenList当中。如果不在,加入OpenList,计算出相应的G、H、F值,并把当前格子作为它们的“父亲节点”。
public Node aStarSearch(Node start, Node end) {
// 把起点加入 open list
openList.add(start);
//主循环,每一轮检查一个当前方格节点
while (openList.size() > 0) {
// 在OpenList中查找 F值最小的节点作为当前方格节点
Node current = findMinNode();
// 当前方格节点从open list中移除
openList.remove(current);
// 当前方格节点进入 close list
closeList.add(current);
// 找到所有邻近节点
List<Node> neighbors = findNeighbors(current);
for (Node node : neighbors) {
if (!openList.contains(node)) {
//邻近节点不在OpenList中,标记父亲、G、H、F,并放入OpenList
markAndInvolve(current, end, node);
}
}
//如果终点在OpenList中,直接返回终点格子
if (find(openList, end) != null) {
return find(openList, end);
}
}
//OpenList用尽,仍然找不到终点,说明终点不可到达,返回空
return null;
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号