

蒙特卡洛树搜索(MonteCarlo Tree Search)MCTS
AlphaGo, AlphaZero 的成功,让原本小众的MCTS火了一把。
MCTS算法的产生是以决策论、博弈论、蒙特卡洛方法以及老.虎.机算法为基础的。
在决策论中,主要涉及马尔可夫决策过程Markov Decision Processes (MDPs): MDPs是对智能体(agent)在环境(environment)中连续决策进行建模,agent当前的动作不仅对当前产生影响,而且还会对将来的的情况产生影响,如果从奖励的角度,即MDPs不仅影响即时的奖励,而且还会影响将来的长期奖励,因此,MDPs需要对即时奖励与长期奖励的获得进行权衡。
博弈论,将决策论扩展到多智能体交互过程。多个智能体的决策过程中, 如果没有智能体可以通过单方面的转换策略而受益,则多个智能体的策略组合形成了纳什均衡。
MCTS迭代地构建搜索树,直到达到预先设定的停止条件,比如迭代步数,迭代时间,迭代耗费的内存等等。
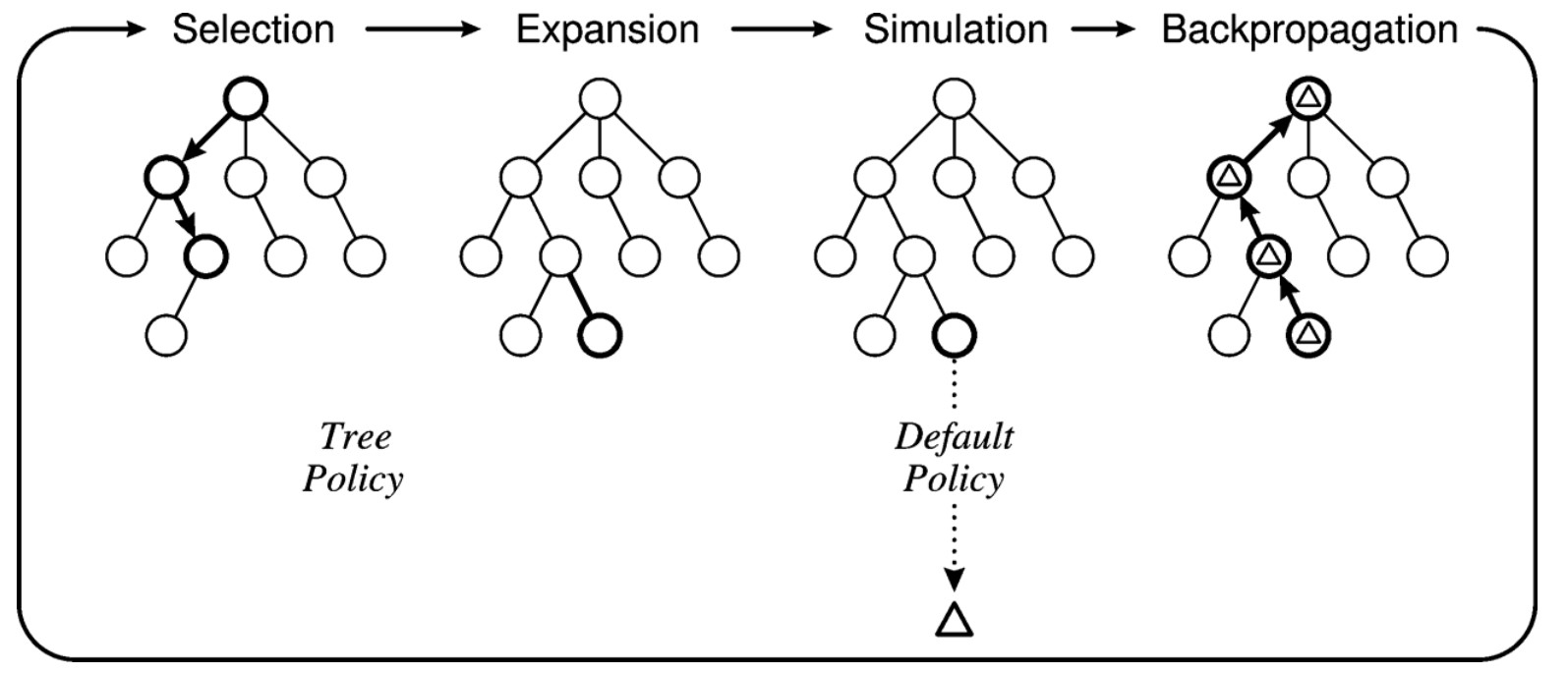
搜索树中每个节点代表着一种状态,而每条边代表着动作。MCTS包括每次迭代大体不包含四个过程。即选择、扩展、模拟和反向传播。
选择: 从根据节点开始,然后递归地向下执行子节点选择策略,直到达到最达到一个不完全扩展节点(即此节点的仍有未访问的子节点);
扩展:从不完全扩展节点中选择一个未访问的子节点;
模拟: 从未经访问的节点开始执行默认策略向下递归,直到到达叶子节点,产生结果;
回溯:根据模拟产生的结果,反向更新路径上每个节点的信息。
在选择与扩展过程中,涉及选择策略,在模拟过程中也涉及向下递归的策略。
# 一般MCTS算法:
def mcts(v0):
"""
v: 节点, 代表状态, v0 起始状态,vl是从v0开始一直向下递归迭代选择后到达不完全扩展节点后,选择的某一个未访问后子节点。
action:
"""
while ! stop_conditions:
vl = expand_policy(v0)
reward = simulation_policy(vl)
backup(vl,reward)
return action(select_policy(v0))
def expand_policy(v):
while v is not terminal_leaf:
if v not full expanded:
return unvisited_child(v)
else:
return select_policy(v)
def select_policy(v):
return max([uct(child) for child in v.children])
def uct(v):
return v.total_reward/v.visit_num + c * sqrt(2 ln(v.parent.visit_num)/v.visit_num)
def similuation_policy(v):
while v if not terminal:
v = random_select_child(v)
return reward(v)
def backup(v, reward):
while v is not None:
v.visit_num +=1
v.total_reward +=reward
v = v.parent
下图即展示了MCTS的一次迭代,在选择部分,从根节点一直向下迭代,直到到达某一不完全扩展节点(加粗部分,即为选择的迭代路径,最下面为某一个不完全扩展节点,即基有未经访问的子节点,图中未画出。 因为所展示的树上的节点都是访问过的。);在扩展阶段,根据扩展策略选择其一个未访问过的子节点(如图上加粗部分,在选择阶段是没有的,因为其之前并未被访问,在当前扩展阶段则将其加入树中);然后,在模拟阶段从这个未访问的子节点开始,采用模拟策略,一直到最终状态,生成结果;最后将这个结果反向对此路径上的所有点更新信息,即完成一次完整的MCTS迭代。
在一般的MCTS算法中,扩展策略与模拟策略采用随机策略。对于选择策略,采取UCB(upper confidenece bound) 或称UCT(upper confidence bound for trees)
其中v'是v的某个子节点, N(v), N(v')分别表示访问节点v和其子节点v'的次数,Q(v') 表示v'获得的所有奖励。那么此公式的第一项表示子节点v'经访问获得的平均奖励。c是调和因子,常数,人工设定(比如1/\sqrt{2}),其作用是调节第二项所占比重。可见第二项随着子节点v'访问次数增加,其值会有所有降低,也可反过来讲,即访问少的子节点,此值会相对高些。综合两项可知,这一策略平衡了利用与探索(exploitatione and exploration),即有效利用之前经验倾向选择当前的高价值节点,也会兼顾探索,即(第二项)倾向于选择访问次数少的子节点,避免陷入局部最优。
[8]: A Survey ofMonte Carlo Tree Search Methods.
[9]: Świechowski, M., Godlewski, K., Sawicki, B., & Mańdziuk, J. (2021). Monte Carlo Tree Search: A Review of Recent Modifications and Applications.

 浙公网安备 33010602011771号
浙公网安备 33010602011771号