

Ceres学习-1.CostFunction
CostFunction的概念参考 https://www.cnblogs.com/vivian187/p/15398068.html
Ceres求解器,像所有基于梯度的优化算法一样,依赖于能够评估目标函数及其在其域内任意点的导数。实际上,定义目标函数及其雅可比矩阵是用户在使用Ceres求解器求解优化问题时需要执行的主要任务。正确、高效的雅可比矩阵计算是获得良好性能的关键
非线性优化涉及到对目标函数进行求导,从而迭代优化。
Ceres Solver提供了三种求导方式:
-
自动求导: 自动求导是通过定义一个仿函数,然后传给AutoDiffCostFunction/...,就可以让Ceres自己去求导。
-
数值求导: 有时,无法定义自动求导的模板仿函数,比如参数的估计调用了无法控制的库函数或外部函数。这种情况无法使用自动求导了,数值求导便可以派上用场了。
数值求导用法类似,先定义仿函数,然后传递给NumericDiffCostFunction/...,然后去构造问题求解。 -
解析求导: 有些情况,自己写求导解析式,计算效率会更高一些。
如果使用解析求导的方式,就要自行计算残差和雅克比。
1.自动求导
1.1 定义仿函数
仿函数,其实是一个类,只不过这个类的作用像函数,所以叫仿函数。原理就是类实现了operator()函数。
仿函数参考: https://www.cnblogs.com/vivian187/p/15329482.html
// 来自ceres-solver-1.14.0/examples/helloworld.cc
struct CostFunctor {
template <typename T> bool operator()(const T* const x, T* residual) const {
residual[0] = 10.0 - x[0];
return true;
}
};
要获得自动求导代价函数,必须定义一个带有模板化operator()(仿函数)的类,该操作符根据模板形参T计算代价函数。
operator()函数必须在最后一个实参(唯一的非const实参,即残差)中写入计算值,并返回true表示成功。
1.2 构造代价函数
// 来自ceres-solver-1.14.0/examples/helloworld.cc
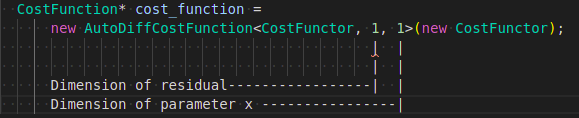
CostFunction* cost_function = new AutoDiffCostFunction<CostFunctor, 1, 1>(new CostFunctor);
AutoDiffCostFunction的模板参数说明:
第1个模板参数是仿函数CostFunctor
第2个模板参数是残差块中残差的数量
第3个模板参数是第一个参数块中参数的数量
如果有多个参数块,则第4/5...个模板参数: 依次写出各个参数块中参数的数量
1.3 Ceres提供的类
Ceres提供的自动求导仿函数:
AutoDiffCostFunction类(上面的例子)
DynamicAutoDiffCostFunction类
参考:
https://www.cnblogs.com/vivian187/p/15349110.html#3autodiffcostfunction

2.数值求导
2.1 定义仿函数
// 来自ceres-solver-1.14.0/examples/helloworld_numeric_diff.cc
struct CostFunctor {
bool operator()(const double* const x, double* residual) const {
residual[0] = 10.0 - x[0];
return true;
}
};
与自动求导的仿函数不同的是,数值求导的operator()函数不是模板函数,而是直接使用了double
2.2 构造代价函数
// 来自ceres-solver-1.14.0/examples/helloworld_numeric_diff.cc
CostFunction* cost_function =
new NumericDiffCostFunction<CostFunctor, CENTRAL, 1, 1> (new CostFunctor);
和自动求导方法相比,在用数值求导时需要额外给定一个参数ceres::CENTRAL 。这个参数告诉计算机如何计算导数。
NumericDiffCostFunction的模板参数说明:
第1个模板参数是仿函数CostFunctor
第2个模板参数是数值求导的方式。这里选用了CENTRAL,还有FORWARD、RIDDERS等
第3个模板参数是残差块中残差的数量
第4个模板参数是第一个参数块中参数的数量
如果有多个参数块,则第4/5...个模板参数: 依次写出各个参数块中参数的数量

2.3 Ceres提供的类
Ceres提供的数值求导仿函数:
NumericDiffCostFunction类(上面的例子)
DynamicNumericDiffCostFunction类
参考:
https://www.cnblogs.com/vivian187/p/15349110.html#3autodiffcostfunction

3.解析求导
3.1 定义代价函数类
// 来自ceres-solver-1.14.0/examples/helloworld_analytic_diff.cc
// A CostFunction implementing analytically derivatives for the
// function f(x) = 10 - x.
class QuadraticCostFunction
: public SizedCostFunction<1 /* number of residuals */,
1 /* size of first parameter */> {
public:
virtual ~QuadraticCostFunction() {}
virtual bool Evaluate(double const* const* parameters,
double* residuals,
double** jacobians) const {
double x = parameters[0][0];
// f(x) = 10 - x.
residuals[0] = 10 - x;
// f'(x) = -1. Since there's only 1 parameter and that parameter
// has 1 dimension, there is only 1 element to fill in the
// jacobians.
//
// Since the Evaluate function can be called with the jacobians
// pointer equal to NULL, the Evaluate function must check to see
// if jacobians need to be computed.
//
// For this simple problem it is overkill to check if jacobians[0]
// is NULL, but in general when writing more complex
// CostFunctions, it is possible that Ceres may only demand the
// derivatives w.r.t. a subset of the parameter blocks.
if (jacobians != NULL && jacobians[0] != NULL) {
jacobians[0][0] = -1;
}
return true;
}
};
自定义的代价函数类要继承自CostFunction或者SizedCostFunction。其实SizedCostFunction是继承自CostFunction的,只是确定了size(各个参数块的数量)。
Evaluate()函数中计算了残差和雅克比。
3.2 构造代价函数
// 来自ceres-solver-1.14.0/examples/helloworld_analytic_diff.cc
CostFunction* cost_function = new QuadraticCostFunction;
3.3 Ceres提供的类
Ceres提供的解析求导代价函数类:
CostFunction类
SizedCostFunction类(上面的例子)
参考:
https://www.cnblogs.com/vivian187/p/15349110.html#3autodiffcostfunction
3.4 什么情况下使用解析求导
按照官方说明,以下情况可以使用解析求导
函数式简单,便于求出导数解析式
能使用Matlab Maple Mathmatic SymPy等数学软件求出了导数的解析式
性能极致要求
没有其他好的方法去求导
喜欢手算导数
综上所述,建议优先使用自动求导和数值求导的方式,对雅克比计算擅长者和极致性能追求者可考虑使用解析求导的方式。
参考
https://www.jianshu.com/p/39d8e0f31bbf
https://blog.csdn.net/ktigerhero3/article/details/85062092

