



9.Ceres官方教程-On Derivatives~Analytic Derivatives
考虑以下曲线(Rat43 https://www.itl.nist.gov/div898/strd/nls/data/ratkowsky3.shtml)的拟合问题:

也就是说,给定一些数据 ,确定最适合该数据的参数
,确定最适合该数据的参数
我们面临的问题就是求解 使下列表达式的取值最小:
使下列表达式的取值最小:

最佳拟合的概念取决于用来衡量拟合质量的目标函数的选择,而该目标函数又取决于产生观测结果的潜在噪声过程。当噪声是高斯噪声时,将差的平方和最小化是正确的做法。在这种情况下,参数的最优值是最大似然估计
为了使用Ceres求解器来解决这个问题,我们需要定义一个CostFunction来计算给定x和y的残差f及其对b1,b2,b3和b4的导数。
根据高等数学中微积分的知识,我们可以算出f的一系列导数:

根据这些手动计算出的导数,我们现在可以实现CostFunction了:
class Rat43Analytic : public SizedCostFunction<1,4> {
public:
Rat43Analytic(const double x, const double y) : x_(x), y_(y) {}
virtual ~Rat43Analytic() {}
virtual bool Evaluate(double const* const* parameters,
double* residuals,
double** jacobians) const {
const double b1 = parameters[0][0];
const double b2 = parameters[0][1];
const double b3 = parameters[0][2];
const double b4 = parameters[0][3];
residuals[0] = b1 * pow(1 + exp(b2 - b3 * x_), -1.0 / b4) - y_;
if (!jacobians) return true;
double* jacobian = jacobians[0];
if (!jacobian) return true;
jacobian[0] = pow(1 + exp(b2 - b3 * x_), -1.0 / b4);
jacobian[1] = -b1 * exp(b2 - b3 * x_) *
pow(1 + exp(b2 - b3 * x_), -1.0 / b4 - 1) / b4;
jacobian[2] = x_ * b1 * exp(b2 - b3 * x_) *
pow(1 + exp(b2 - b3 * x_), -1.0 / b4 - 1) / b4;
jacobian[3] = b1 * log(1 + exp(b2 - b3 * x_)) *
pow(1 + exp(b2 - b3 * x_), -1.0 / b4) / (b4 * b4);
return true;
}
private:
const double x_;
const double y_;
};
这是一段冗长乏味的代码,难以阅读,并且有很多冗余。所以在实践中,我们会缓存一些子表达式来提高它的效率,这将会得到如下结果:
class Rat43AnalyticOptimized : public SizedCostFunction<1,4> {
public:
Rat43AnalyticOptimized(const double x, const double y) : x_(x), y_(y) {}
virtual ~Rat43AnalyticOptimized() {}
virtual bool Evaluate(double const* const* parameters,
double* residuals,
double** jacobians) const {
const double b1 = parameters[0][0];
const double b2 = parameters[0][1];
const double b3 = parameters[0][2];
const double b4 = parameters[0][3];
const double t1 = exp(b2 - b3 * x_);
const double t2 = 1 + t1;
const double t3 = pow(t2, -1.0 / b4);
residuals[0] = b1 * t3 - y_;
if (!jacobians) return true;
double* jacobian = jacobians[0];
if (!jacobian) return true;
const double t4 = pow(t2, -1.0 / b4 - 1);
jacobian[0] = t3;
jacobian[1] = -b1 * t1 * t4 / b4;
jacobian[2] = -x_ * jacobian[1];
jacobian[3] = b1 * log(t2) * t3 / (b4 * b4);
return true;
}
private:
const double x_;
const double y_;
};
这两种实现在性能上有什么不同?
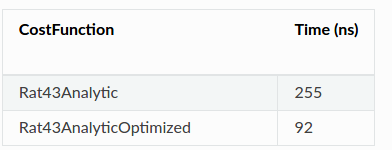
Rat43AnalyticOptimized比Rat43Analytic快2.8倍。这种运行时上的差异并不少见。为了从分析计算的导数中获得最佳性能,通常需要优化代码以考虑公共子表达式。
什么时候应该使用analytical derivatives?
1.表达式很简单,例如大部分是线性的
2.像Maple、Mathematica或symy这样的计算机代数系统可以用来符号化地区分目标函数,并生成c++来计算它们。
3.式子中有一些代数结构可以实现比自动微分有更好的性能。
也就是说, 获得在计算倒数之外的最大性能需要大量的工作.在沿着这条路径走下去之前,评估雅可比矩阵的计算花费是整个求解时间的一小部分是很有用的,,记住Amdahl法则是你的朋友。
4.没有其他方法来计算导数,例如你想要计算一个多项式的根的导数:

对于x,y,这就需要用到反函数定理
5.你喜欢链式法则也喜欢手动计算代数运算。

