机器视觉康耐视智能相机Insight-手眼标定详细步骤
In-Sight 智能相机包含标定手眼的工具 CalibrateGrid,用手动的标定方式,即将康耐视标定片固定在运动平台上,然后手动输入电机位置坐标,要保证电机在 X 方向移动一次,Y 方向移动一次,旋转两次角度,切旋转角度差不能低于 6°,共五次,详情如下:
1 .将 CalibrateGrid 工具打开弹出的对话框中进行如下设置:
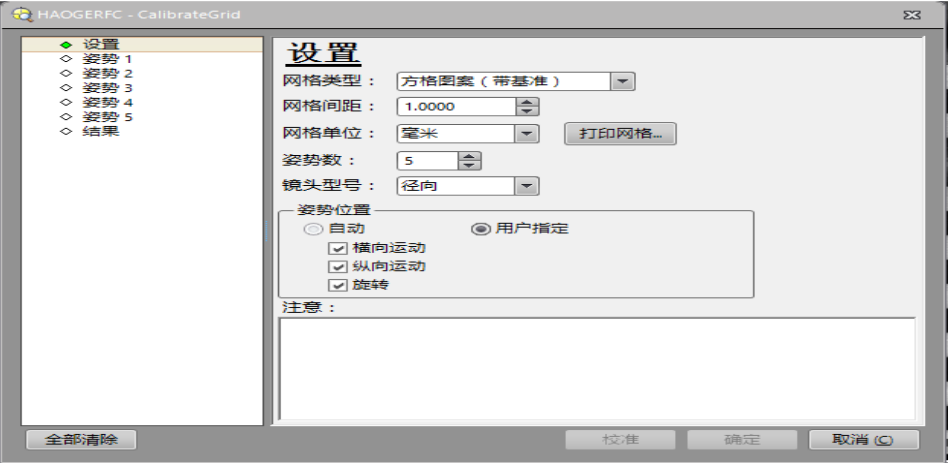
上图所示,网格类型选择带基准的方格图案,网格间距即为标定片单格尺寸,姿势数为要
移动和旋转的总次数,姿势位置选择用户指定,横向,纵向和旋转根据具体情况选择。
2 设置完成后点击姿势 1,进入如下界面:
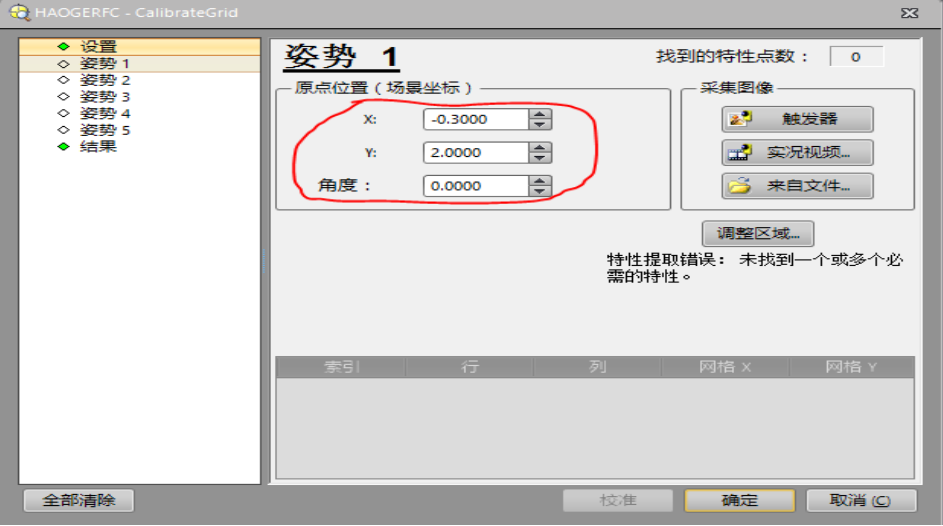
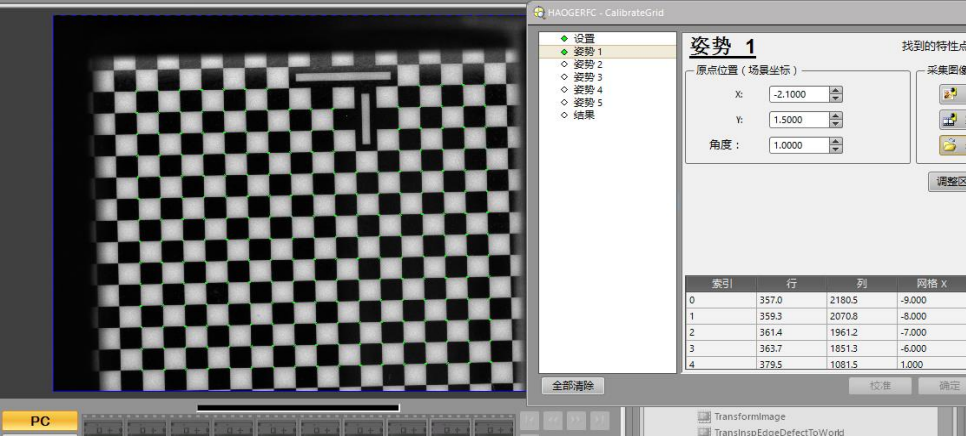
在上图红色标记处输入此时运动平台的坐标,同时点击触发器采集图像,采集后的结果如下图所示:
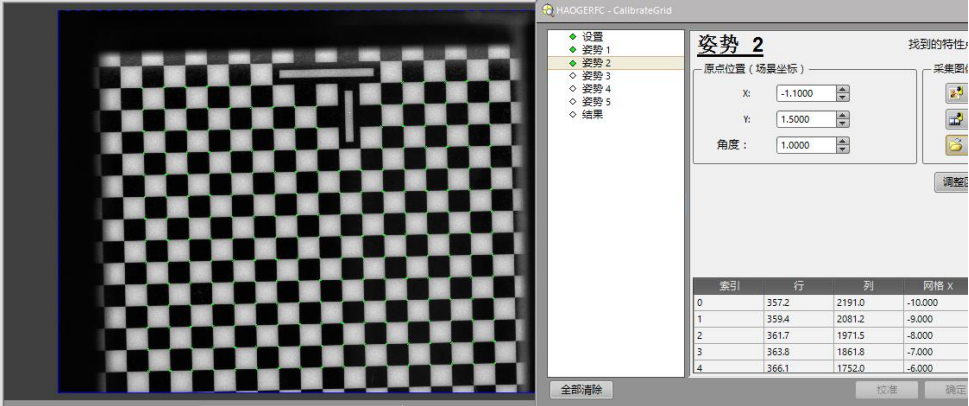
3 设置完成后点击姿势 2,并输入此时运动平台坐标并采集图片,结果如下图所示:
4 设置完成后点击姿势 3,并输入此时运动平台坐标并采集图片,结果如下图所示:

5 设置完成后点击姿势 4,并输入此时运动平台坐标并采集图片,结果如下图所示:

此时角度向正方向旋转了 3°。
6 设置完成后点击姿势 5,并输入此时运动平台坐标并采集图片,结果如下图所示:

此时角度向正方向旋转了-6°(要保证和上次角度之间的角度差大于 6°),校准按钮从禁用状态被激活,点击校准后等待界面,校准完成后出现如下界面:
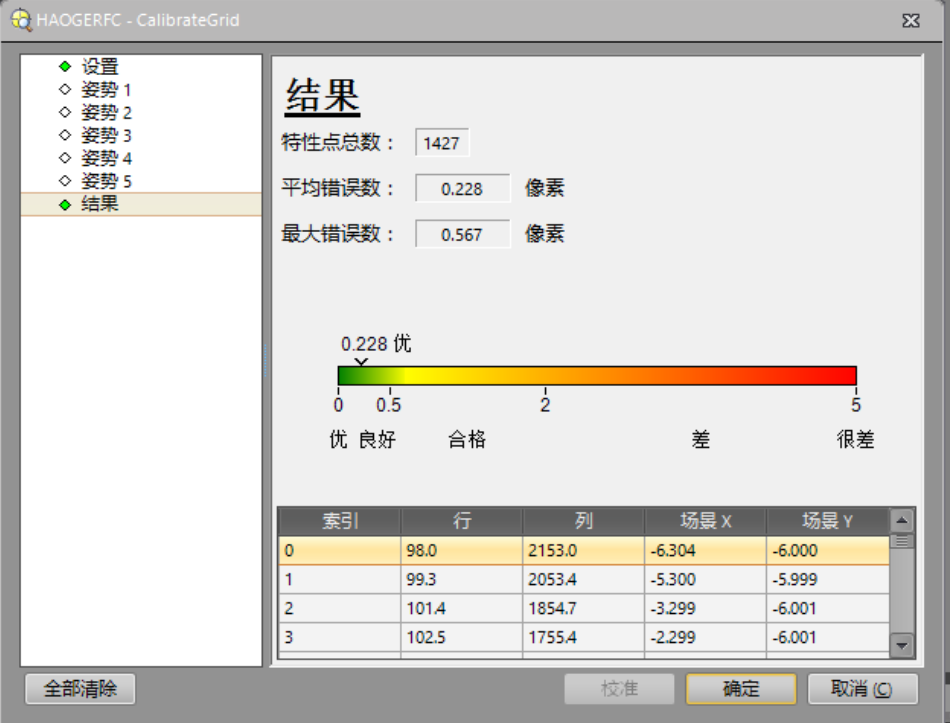
校准结果合格即可使用,然后点击确定完成标定。
本文来自博客园,作者:{视觉人机器视觉},转载请注明原文链接:https://www.cnblogs.com/visionman/p/17444965.html

 浙公网安备 33010602011771号
浙公网安备 33010602011771号