Halcon深度学习-重要知识点-前向传播(forward)和反向传播(backward)
Halcon深度学习前向传播–前向传播(forward)和反向传播(backward)
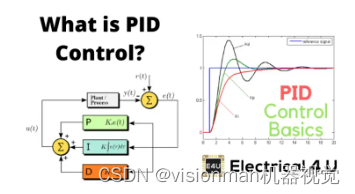
Halcon深度学习分为前向传播(forward)和反向传播(backward),其实两者关系更像PID控制,如果你在大学是自动化相关专业,对PID控制并不陌生。只要学过自动控制原理相关知识你肯定知道其中的奥秘。
传播(forward)对应下图的Plant/Process(开环计算),
作用于y(t)。
反向传播(backward),相当于上图中的PID(闭环计算)
反作用于输入u(t)。
PID控制为了整个系统的稳定性,自动对控制系统进行准确且迅速的校正。通过调整控制参数(比例增益、积分增益/时间、微分增益/时间)让系统达到最佳的控制效果。
前向传播(forward)和反向传播(backward)是为了在初始权重和偏置的情况下的损失函数,以及损失函数对每个要学习的参数(权重参数和偏置参数)的导数,之后即可按照选定的学习率更新参数,然后不断循环计算损失函数、更新参数直到达到
本文来自博客园,作者:{视觉人机器视觉},转载请注明原文链接:https://www.cnblogs.com/visionman/p/17405106.html

 浙公网安备 33010602011771号
浙公网安备 33010602011771号