
海康3D轮廓仪调试详细步骤
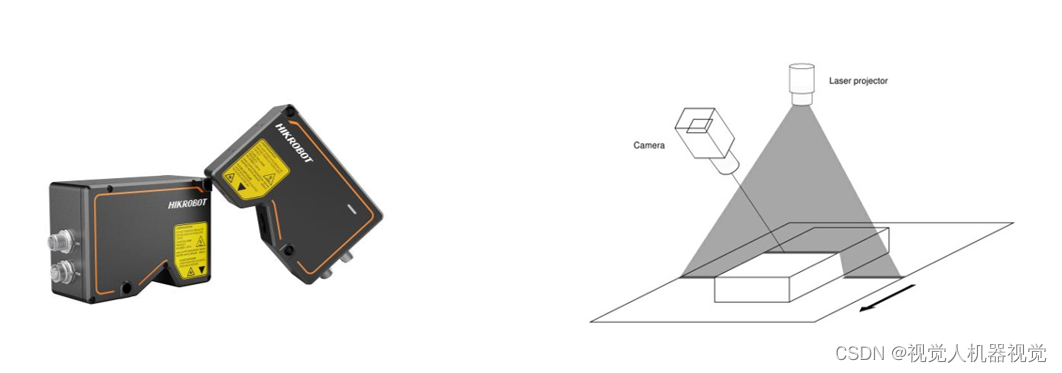
- 激光三角测量法
3D激光轮廓仪是基于激光三角测量法(laser triangulation)来重建三维场景。向被测物表面投射激光平面(光片,sheet of light) ,通过使用CMOS相机接收其反射光的变化,可以非接触方式测量高度、高度差、宽度等轮廓(截面形状)。通过被测物和轮廓仪之间的相对运动,对连续获取的轮廓数据进行图像处理重构获得被测物的3D形状,实现高精度测量及检测。
![在这里插入图片描述]()
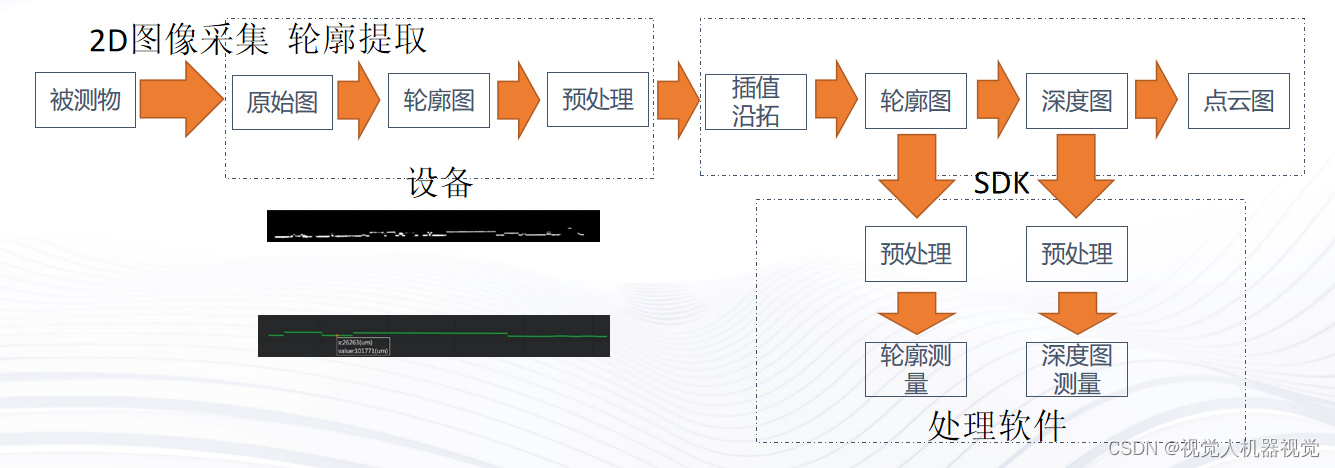
2.轮廓仪数据流向及成像过程
![在这里插入图片描述]()
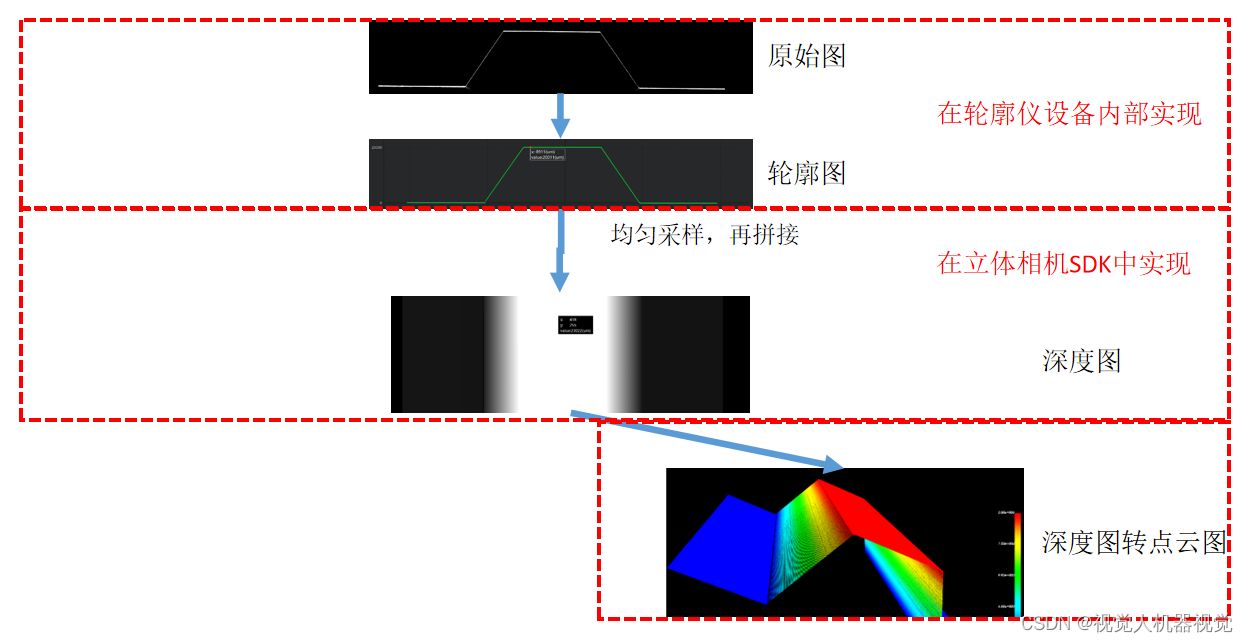
3.3D激光轮廓仪的成像过程
DP系列3D轮廓仪不依托于外部控制器,仅凭设备本身和配套SDK即可实现全部功能,设备支持原始图、轮廓图、深度图(点云图)、亮度图(chunk附加信息)的输出。
![在这里插入图片描述]()
![在这里插入图片描述]()
![在这里插入图片描述]()
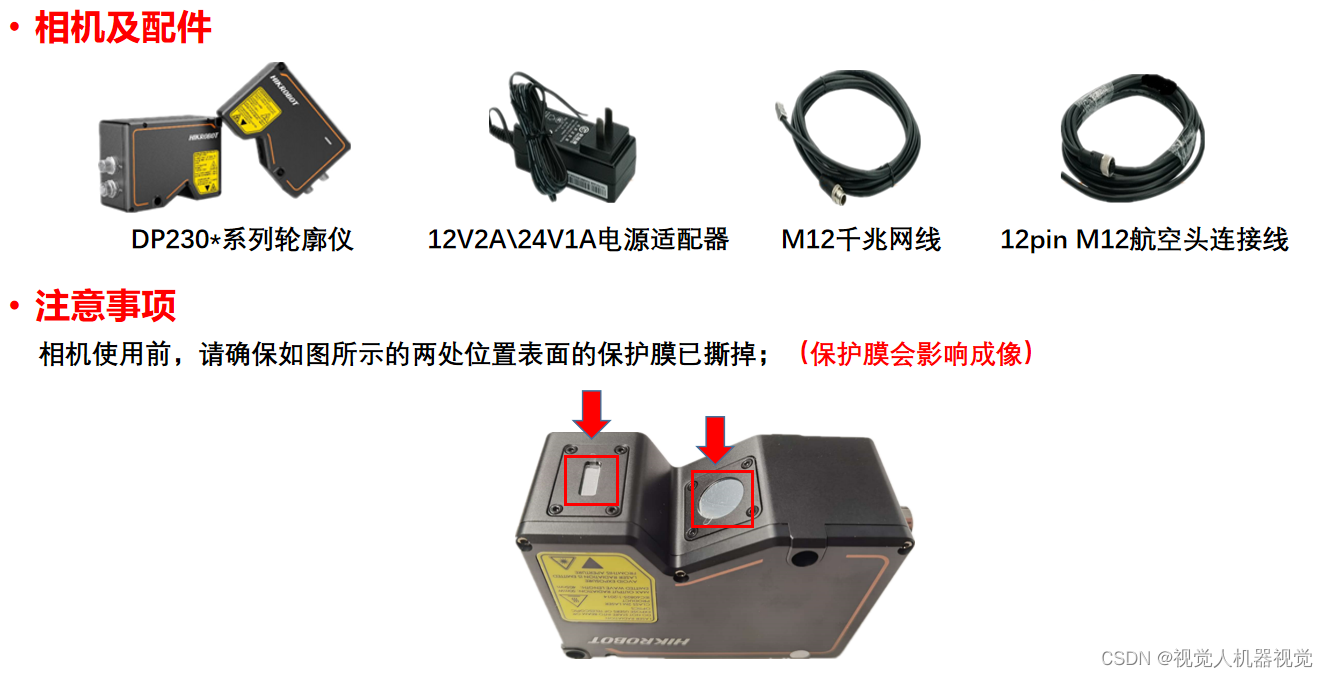
4.DP2305\07轮廓仪相机接线说明
本文来自博客园,作者:{视觉人机器视觉},转载请注明原文链接:https://www.cnblogs.com/visionman/p/17405090.html

 浙公网安备 33010602011771号
浙公网安备 33010602011771号