康耐视智能相机Insight与四轴,六轴工业机器人视觉引导定位配合详细方法与步骤
Insight相机; PCBased原理类似,可以参考本文的方法 。
视觉定位引导4轴或6轴机器人 相机固定安装在支架上,或者安装在机器人上
首先需要了解的……
- 是否是多相机引导的对位贴合类项目?
对位贴合类项目,不论采用机器人还是运动平台,考虑采用Alignplus TA; - 是否是单相机引导?还是多相机多工位组合装配?
多相机多工位组合装配引导,考虑采用Visionpro VGR; - 相机安装在固定支架上,还是安装在机器人上?固定支架
安装的相机是否下往上拍照,还是上往下拍照?
尽量采用本文档介绍的实物标定方法,以减少客户的工作量,视觉模块化,以缩 短调试时间 - 机器人治具的取放方式:夹爪还是吸盘?
夹爪式一般用于精度不高的系统,吸盘用于精度高的; - 确定系统技术指标:整体精度要求?视觉的像素分辨率?
机器人的精度?
由此确定对视觉系统的精度要求
调试方法:使用实物标定模板文件
文件名:Robot Guide.job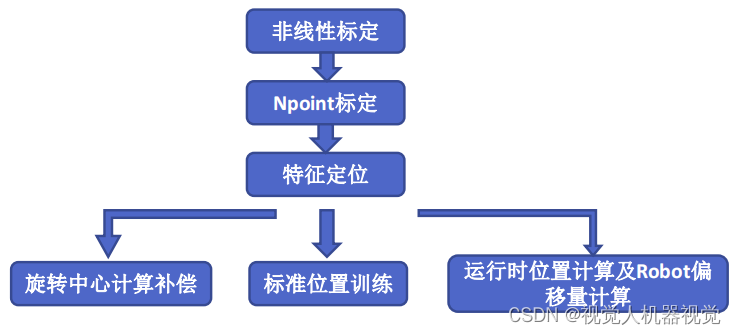
一. 确定是否需要做非线性标定(Camera Calibration)?
➢ 计算像素分辨率;确定系统精度要求;确定FOV;
➢ 确定产品在相机FOV内可能出现的位置范围;
➢ 查所使用镜头的光学畸变率/TV失真;
本文来自博客园,作者:{视觉人机器视觉},转载请注明原文链接:https://www.cnblogs.com/visionman/p/17405086.html

 浙公网安备 33010602011771号
浙公网安备 33010602011771号