康耐视visionpro-机器视觉定位引导-经验总结-来自视觉人粉丝分享
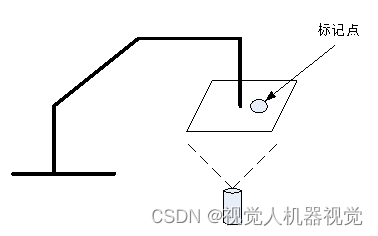
1、机器人吸取电路板,移动到拍照位置,并在电路板上找一个标记点,并且,通过机器人示教把当前电路板能够准确的放入到目标位置。
2、机器人吸取电路板吸取电路板,在x,y方向进行移动,总共移动4个位置,记录4个位置的机器人的坐标,以及拍摄图像
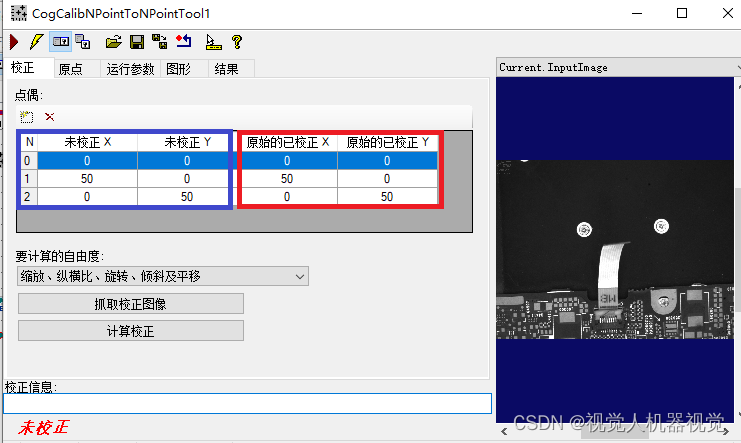
3、使用vp的CogCalibNpointToNpoint工具,并在蓝框填入标志点的像素坐标,红框填入对应的机器人坐标。
4.点运行完成标定功能。
5、完成标定后,整个流程如下
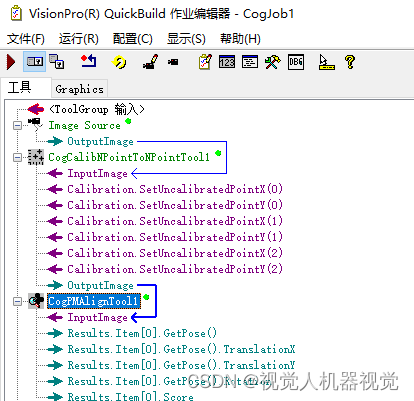
在模板匹配中把模板中心进行记录。然后,调整标定工具的校正原点
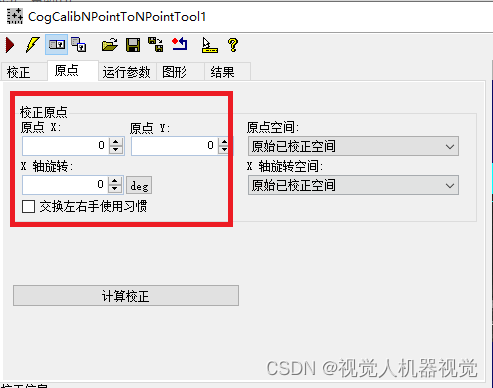
使得模板匹配的模板中心x,y坐标输出为0,0,表示当前吸取的电路板能够准确的放入模板位置
下次,再吸取电路板时,执行模板匹配后,输出的x,y坐标就是机器人应当移动的x,y的偏移量
这样x y 就计算完成了。
但往往,因为还有旋转。所以还要计算角度
机器人不用旋转中心进行标定
旋
本文来自博客园,作者:{视觉人机器视觉},转载请注明原文链接:https://www.cnblogs.com/visionman/p/17405049.html

 浙公网安备 33010602011771号
浙公网安备 33010602011771号