将来自信息序列\(\{a_n\}\)的两个分离的k比特符号同时加在两个正交载波\(\cos2\pi f_{c}t\)和\(\sin2\pi f_{c}t\)上。这就是正交幅度调制(Quadrature Amplitude Modulation,QAM)。信号波形可以表示为:
\[\begin{aligned}
s_{m}(t) &= \text{Re}[(A_{mi}+jA_{mq})g(t)e^{j2\pi f_{c}t}]\\
&=A_{mi}\color{red}{g(t)\cos(2\pi f_{c}t)}-A_{mq}\color{red}{g(t)\sin(2\pi f_{c}t)}\\
&=A_{mi}\color{red}{y_{1}(t)}-A_{mq}\color{red}{y_{2}(t)}
\end{aligned}\tag{1}\]
- \(A_{mi},A_{mq}\)是承载信息的正交载波的信号幅度;
- \(g(t)\)为实信号脉冲
1.正交展开
由(1)式最后两行可以看出,\(s_{m}(t)\)被表示成了两个基函数\(\color{blue}{y_{1}(t)=g(t)\cos(2\pi f_{c}t), y_{2}(t)=-g(t)\sin(2\pi f_{c}t)}\)的线性组合,其中的系数分别为\(\color{blue}{A_{mi},A_{mq}}\)。这两个基函数与相位调制中的两个基函数完全一样,因此可以得到完全一样的标准正交基如下:
\[\begin{aligned}
\phi_{1}(t) &= \sqrt{\frac{2}{\mathcal{E}_{g}}}g(t)\cos(2\pi f_{c}t)\\
\phi_{2}(t) &= -\sqrt{\frac{2}{\mathcal{E}_{g}}}g(t)\sin(2\pi f_{c}t)
\end{aligned}\tag{2}\]
将(1)式进行改写并将(2)式带入可以得到:
\[\begin{aligned}
s_{m}(t) &= A_{mi}\sqrt{\frac{\mathcal{E}_{g}}{2}}\color{red}{\sqrt{\frac{2}{\mathcal{E}_{g}}}g(t)\cos(2\pi f_{c}t)}+A_{mq}\sqrt{\frac{\mathcal{E}_{g}}{2}}\color{red}{\left(-\sqrt{\frac{2}{\mathcal{E}_{g}}}g(t)\sin(2\pi f_{c}t)\right)}\\
&=A_{mi}\sqrt{\frac{\mathcal{E}_{g}}{2}}\color{red}{\phi_{1}(t)}+A_{mq}\sqrt{\frac{\mathcal{E}_{g}}{2}}\color{red}{\phi_{2}(t)}
\end{aligned}\tag{3}\]
此即为QAM调制信号的正交展开式,相应的矢量表达式为:
\[\begin{aligned}
\bold{s_{m}}=\left[A_{mi}\sqrt{\frac{\mathcal{E}_{g}}{2}},A_{mq}\sqrt{\frac{\mathcal{E}_{g}}{2}}\right]
\end{aligned}\tag{4}
\]
2. 能量计算
信号\(s_{m}(t)\)的能量为
\[\begin{aligned}
\mathcal{E}_{m}=\Vert \bold{s_{m}} \Vert^{2}=\frac{\mathcal{E}_{g}}{2}(A_{mi}^{2}+A_{mq}^{2})
\end{aligned}
\tag{5}
\]
在矩形星座的特殊条件下,即\(M=4,16,64\cdots\)且在两个方向上的幅度为\(\pm1,\pm3,\cdots,\pm(\sqrt{M-1})\),平均信号能量为:
\[\begin{aligned}
\mathcal{E}_{avg}&=\frac{1}{M}\frac{\mathcal{E}_{g}}{2}\sum_{m=1}^{\sqrt{M}}\sum_{n=1}^{\sqrt{M}}(A_{m}^{2}+A_{n}^{2})\\
&=\frac{\mathcal{E}_{g}}{2M}\times\frac{2M(M-1)}{3}\\
&=\frac{M-1}{3}\mathcal{E}_{g}
\end{aligned}
\tag{6}
\]
平均比特信号能量为:
\[\mathcal{E}_{bavg} = \frac{M-1}{3\log_{2}{M}}\mathcal{E}_{g}\tag{7}
\]
3. 信号点距离
任意一对信号点之间的距离为
\[\begin{aligned}d_{mn}&=\sqrt{\Vert \bold{s_{m}-s_{n}}\Vert^{2}}\\
&=\sqrt{\frac{\mathcal{E}_{g}}{2}[(A_{mi}-A_{ni})^{2}+(A_{mq}-A_{nq})^{2}]}
\end{aligned}\tag{8}\]
当两个信号点相邻时,距离最短,可以得到:
\[d_{\min}=\sqrt{\frac{\mathcal{E}_{g}}{2}[(0)^{2}+(2)^{2}]}=\sqrt{2\mathcal{E}_{g}}\tag{9}
\]
由(7)式可以得到:
\[\mathcal{E}_{g}=\frac{3\log_{2}{M}}{M-1}\mathcal{E}_{bavg}
\]
将其带入(9)式可以得到最小距离与平均比特信号能量的关系:
\[d_{\min}=\sqrt{\frac{6\log_{2}M}{M-1}\mathcal{E}_{bavg}}\tag{10}
\]
4. QAM的另一种表示
对(1)式进行改写
\[\begin{aligned}
s_{m}(t) &= \text{Re}[(A_{mi}+jA_{mq})g(t)e^{j2\pi f_{c}t}]\\
&=\text{Re}[\color{red}{r_{m}e^{j\theta_{m}}}g(t)e^{j2\pi f_{c}t}]\\
&=\color{red}{r_{m}}g(t)\cos(2\pi f_{c}t+\color{red}{\theta_{m}})
\end{aligned}\tag{11}\]
- \(r_{m} = \sqrt{A_{mi}^{2}+A_{mq}^{2}}\)
- \(\theta_{m}=\tan^{-1}(A_{mq}/A_{mi})\)
从这个表达式可以看出,QAM信号波形可以看成组合幅度\(r_{m}\)和相位\(\theta_{m}\)的调制。可以选择\(M_{1}\)个电平的PAM和\(M_{2}\)个相位的PSK的任意组合来构成一个\(M=M_{1}M_{2}\)个星座点的PAM-PSK组合星座图。
5. PAM,PSK和QAM的通用形式
PAM信号的表达式为:
\[s_{m}(t)=\text{Re}[A_{m}g(t)e^{j2\pi f_{c}t}],\quad m=1,2,\cdots,M
\]
PSK信号的表达式为:
\[s_{m}(t) = \text{Re}\left[g(t)e^{j\frac{2\pi}{M}(m-1)}e^{j2\pi f_{c}t}\right]=\text{Re}[A_{m}g(t)e^{j2\pi f_{c}t}],\quad m=1,2,\cdots,M
\]
QAM信号的表达式为:
\[s_{m}(t)=\text{Re}[(A_{mi}+jA_{mq})g(t)e^{j2\pi f_{c}t}]=\text{Re}[A_{m}g(t)e^{j2\pi f_{c}t}], m=1,2,\cdots,M
\]
可见PAM,PSK和QAM信号的通用形式为:
\[s_{m}(t) = \text{Re}[A_{m}g(t)e^{j2\pi f_{c}t}], m=1,2,\cdots,M\tag{12}
\]
式中,\(A_{m}\)由信号传输方式确定
- PAM的\(A_{m}\)是实数,一般等于\(\pm1,\pm3,\cdots,\pm(M-1)\)
- M元PSK的\(A_{m}\)是复数,等于\(e^{j\frac{2\pi}{M}(m-1)}\)
- QAM的\(A_{m}\)也是复数,等于\(A_{m}=A_{mi}+A_{mq}\)
从这个意义上说,PAM,PSK和QAM属于同一种类型,PAM和PSK可认为QAM的特例。在QAM传输方式中,幅度和相位都携带信息,而PAM和PSK只是幅度或相位携带信息。
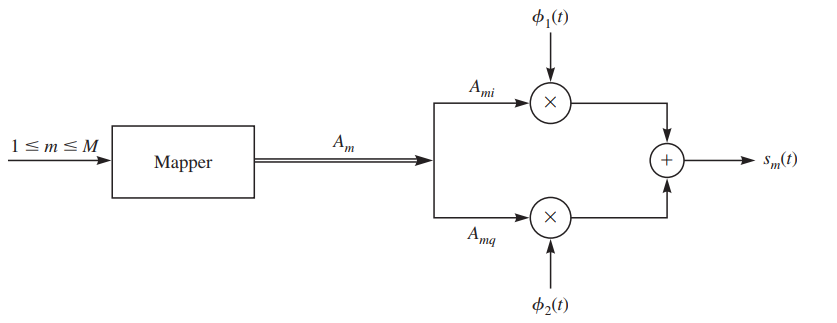
PAM,PSK和QAM信号的信号空间的维度是相当低的(PAM为一维,PSK和QAM为二维的),并且与星座的大小M无关。下图所示就是这种一般类型信号传输方式调制器的结构,其中\(\phi_{1}(t), \phi_{2}(t)\)由式(2)确定。
![一般QAM调制器]()

 浙公网安备 33010602011771号
浙公网安备 33010602011771号