连续相位调制(CPM)
1. CPFSK调制原理
先回顾FSK的调制的时域表达式为:
其中频移量\(\color{red}{m\Delta f,m=1,2,\cdots,M}\)映射所要发送的数字信息。FSK调制的实现方法为:使用\(M=2^{k}\)个调谐到期望频率的振荡器,根据时间间隔T内要发送的特定的k个比特,从M个频率中选择一个频率。然而这么做会导致一个频率到另一个频率的突发切换,工程上突变建模为\(\delta(\cdot)\)函数,由此可知FSK波形的相位是不连续的,这将导致调制信号频谱的旁瓣过大,导致频谱利用率降低。
为了改善这一现象,提出了连续相位频移键控(Continuous Phase Frequency Shift Keying, CPFSK)。
为了表示CPFSK信号,以PAM信号:
开始,式中\(I_{n}\)表示幅度序列,它是由信息序列\({a_{n}}\)来的\(k\)比特二进制数字组映射到幅度电平\(I_{n} = \pm 1, \pm 3, \cdots, \pm(M-1)\)得到的。而\(g(t)\)是一个幅度为 \(1/2T\) 且持续时间为\(T\)秒的矩形脉冲(面积为1/2)。信号\(d(t)\)用来对载波进行频率调制,从而等效低通波形可以表示为:
其中,\(f_{d}\)是峰值频率偏移(Peak Frequency Deviation),\(\phi_{0}\)表示载波的初始相位。相应的载波调制信号可以表示为:
式中,\(\phi(t;I)\)表示载波的时变相位,为
式中,\(d(t)\)信号是不连续的,但是其积分是连续的(注,式中的"\(4\)"单纯是为了后续的计算方便添加的,因为可以把矩形脉冲幅度里面的1/2抵消掉,然后恰好可以把"\(4\pi\)"变成"\(2\pi\)",使之能够满足角频率与频率的转换关系)。所以载波的相位变化是连续的,调制后载波信号的相位在时间区间\([nT,(n+1)T]\) 可以表示为:
式中,\(h\)表示调制指数,调制指数越大,调制后的两个载波频率差值越大;\(\theta_{n}\)是时间区间\([0,(n-1)T]\)内的累积相位,\(q(t)\)为相位响应函数,是频率成形滤波器\(g_{T}(t)\)的积分,它们可以表示为:
CPFSK调制是用将要发送的基带数据控制一个单一频率的载波,载波的相位变化是连续的,有效地抑制了频谱旁瓣,调制后信号的带宽变窄。
2. 连续相位调制
CPFSK实际上是一般类型连续相位调制(CPM)信号的一个特例,CPM的载波相位是:
式中,\(\{I_{k}\}\)是由符号表\(\pm1, \pm3, \cdots,\pm (M-1)\)中选出的M元信息符号序列,\(\{h_{k}\}\)表示调制指数序列,而\(q(t)\)是某个归一化波形。当对所有k有\(h_{k}=h\)时,调制指数对所有的符号都是固定的。当调制指数随着某一个符号到另一个符号而变化时,该信号称为多重 h CPM。在这种情况下,\(\{h_{k}\}\)以循环方式在调制指数集中变化。波形q(t)一般可以表示成某个脉冲\(g(t)\)的积分,即
如果对t>T有\(g(t)=0\),则CPM信号称为全响应CPM。如果t>T有\(g(t)\ne 0\),则已调信号称为部分响应CPM。
图2.1说明了g(t)的几种脉冲形状及其相应的q(t)。易见,通过选择不同的脉冲形状g(t)以及改变调制指数和符号数目M,就可以产生无穷多种CPM信号。注意,CPM信号的记忆性,是通过相位的连续性引入的。
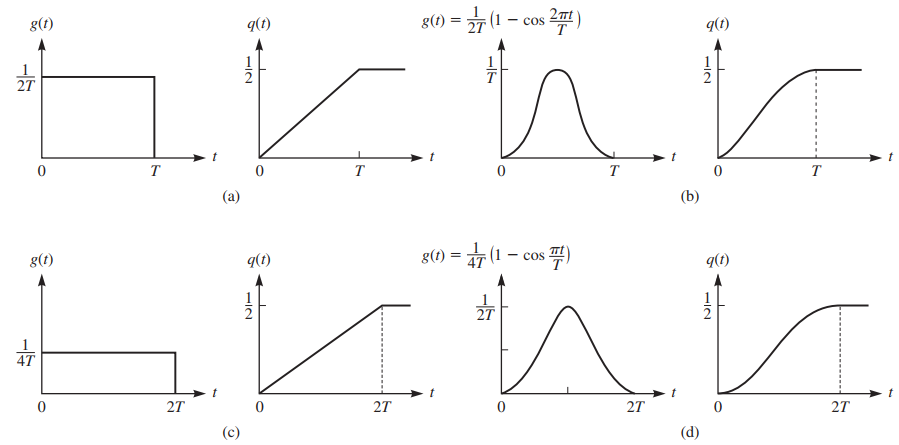
表2.1列出了三种常用的CPM脉冲形状。LREC表示持续时间为\(LT\)的矩形脉冲,这里\(L\)为整数,图2.1(a)所示为\(L=1\)的CPFSK脉冲。图2.1(c)所示为\(L=2\)的LREC脉冲,LRC表示持续时间为\(LT\)的升余弦脉冲,图2.1(b),(d)分别为\(L=1,L=2\)的LRC脉冲。
表2.1 某些常用的CPM脉冲形状
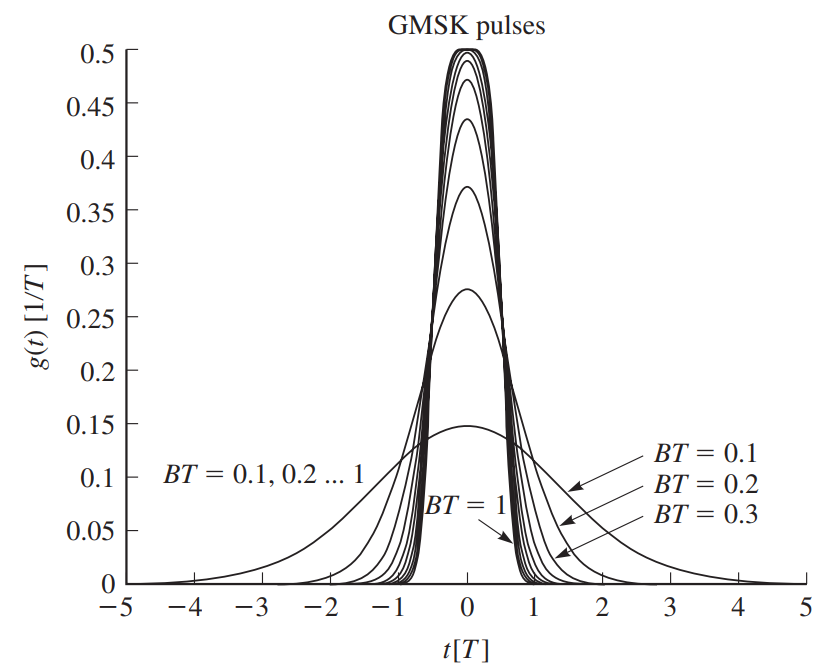
$$ \begin{array}{c|c} \hline \text{LREC} & g(t)=\left\{\begin{aligned}&\frac{1}{2LT},\quad &0\le t \le LT \\ &0, \quad &\text{otherwise} \end{aligned} \right.\\ \hline \text{LRC} & g(t)=\left\{\begin{aligned}&\frac{1}{2LT}(1-\text{cos}\frac{2\pi t}{LT}),\quad &0\le t \le LT \\ &0, \quad &\text{otherwise} \end{aligned} \right.\\ \hline \text{GMSK} & g(t)=\frac{Q(2\pi B(t-\frac{T}{2}))-Q(2\pi B(t+\frac{T}{2}))}{\sqrt{ln2}}\\ \hline \end{array} $$表2.1中的第3种脉冲称为具有带宽参数\(B\)的高斯最小移频键控(Gaussian Minimum-Shift Keying, GMSK)脉冲,B表示高斯脉冲的\(-3dB\)带宽。图2.2所示为时间-带宽乘积BT范围为0.1~1的一组GMSK脉冲。
3. 最小移频键控(MSK)
MSK是二进制CPFSK的一个特例,其调制指数\(h=1/2\),将其带入式(1.6),可以得到在\(nT\le t \le (n+1)T\)间隔中的载波相位是
带入式(1.4)可以得到相应的已调载波信号为
上式表明:二进制CPFSK信号可以表示成在\(nT\le t \le (n+1)T\)间隔中具有两个频率之一的正弦波。定义这两个频率分别为
那么式(3.2)可写为
可以看到 \(s_{1}(t),s_{2}(t)\) 的频率间隔为\(\Delta f=f_{2}-f_{1}=\frac{1}{2T}\)。这是确保在长度为T的信号传输间隔上信号\(s_{1}(t),s_{2}(t)\)正交的最小频率间隔。这就解释了为什么具有\(h=1/2\)的二进制CPFSK称为最小频移键控(MSK)。
3. GFSK的MATLAB代码实现
首先实现“经过高斯滤波的矩形脉冲”,也即是式\((2.5)\)中的\(g(t)\)。
function [Gaussian_filter_q] = Gaussian_filter(B, symb_rate, delay, ts)
% INPUTS:
% B : the 3dB bandwidth of Gaussian filter
% symb_rate : rate of the symbol, in ble it is 1e6 symbol/s
% delay : it controls how many symbols the Gaussian filter cover
% ts : the reciprocal of sample rate
symb_T = 1 / symb_rate;
Gau_t = -delay*symb_T:ts:delay*symb_T;
K = 2*pi*B / sqrt(log(2));
Gau_det = K.*(Gau_t - symb_T / 2);
Gau_sum = K.*(Gau_t + symb_T / 2);
Gaussian_filter_q = 1/(2*symb_T)*[qfunc(Gau_det)-qfunc(Gau_sum)];
end
然后设定参数进行测试:
clear
clc
h = 0.5 ; % the modulation index h = 2f_{d}T
sample_rate = 26e6; % the sample rate
sample_time = 1/sample_rate;
symbol_rate = 1e6;
oversample = sample_rate / symbol_rate;
B = 0.5e6; % the 3db bandwidth is 500Mhz
delay = 1.5 % the gaussian filter covers 3 symbol
tx_bits = [1,0,0,1,0,0,1,0,1,1,1,0,1,1,0,0,1]; % the transmit bits
Gaussian_filter_coeff = Gaussian_filter(B, symbol_rate, delay, sample_time);
tx_data = 2*tx_bits - 1; % NRZ code
tx_data_sample = upsample(tx_data, oversample);
tx_data_filtered = 2*pi*h*conv(Gaussian_filter_coeff,tx_data_sample);
tx_phase = sample_time*cumsum(tx_data_filterd);
tx_cos = cos(tx_phase);
tx_sin = sin(tx_phase);
tx_gfsk = complex(tx_cos,tx_sin);
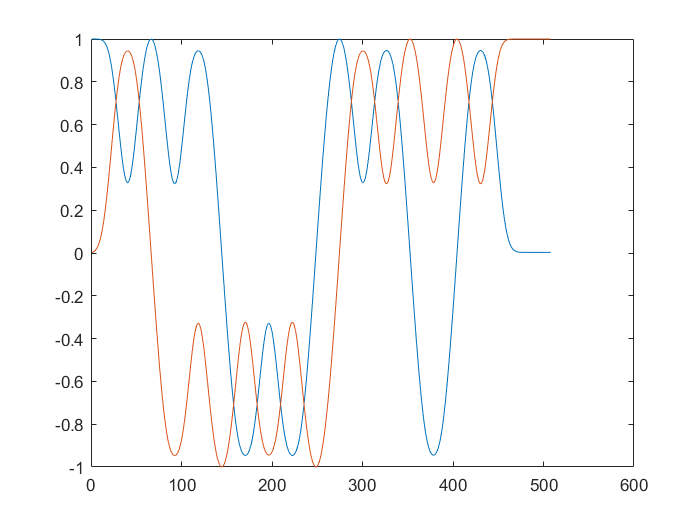
plot(tx_cos);
hold on
plot(tx_sin);
hold off
最终波形如下:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号