
ROS 与 OpenCv
ROS安装opencv
sudo apt-get install ros-kinetic-vision-opencv libopencv-dev python-opencv
功能包下载: https://gitee.com/victorywr/source/tree/master/code_learning/robot_vision
ROS 图像数据与OpenCV数据格式的桥梁:CvBridge
roslaunch robot_vision/launch/usb_cam.launch
可能报错 [ WARN] [1643215244.519801181]: sh: 1: v4l2-ctl: not found
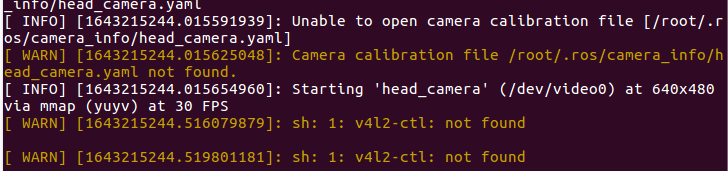
需要安装v4l2 sudo apt-get install v4l-utils
然后重新运行
roslaunch robot_vision/launch/usb_cam.launch
只是一些参数的配置声明

#usb_cam.launch
<launch> <node name="usb_cam" pkg="usb_cam" type="usb_cam_node" output="screen" > <param name="video_device" value="/dev/video0" /> <param name="image_width" value="640" /> <param name="image_height" value="480" /> <param name="pixel_format" value="yuyv" /> <param name="camera_frame_id" value="usb_cam" /> <param name="io_method" value="mmap"/> </node> </launch>
此时摄像头虽然亮着,但是是没有画面的,需要继续打开一个终端执行下面这个脚本
rosrun robot_vision cv_bridge_test.py
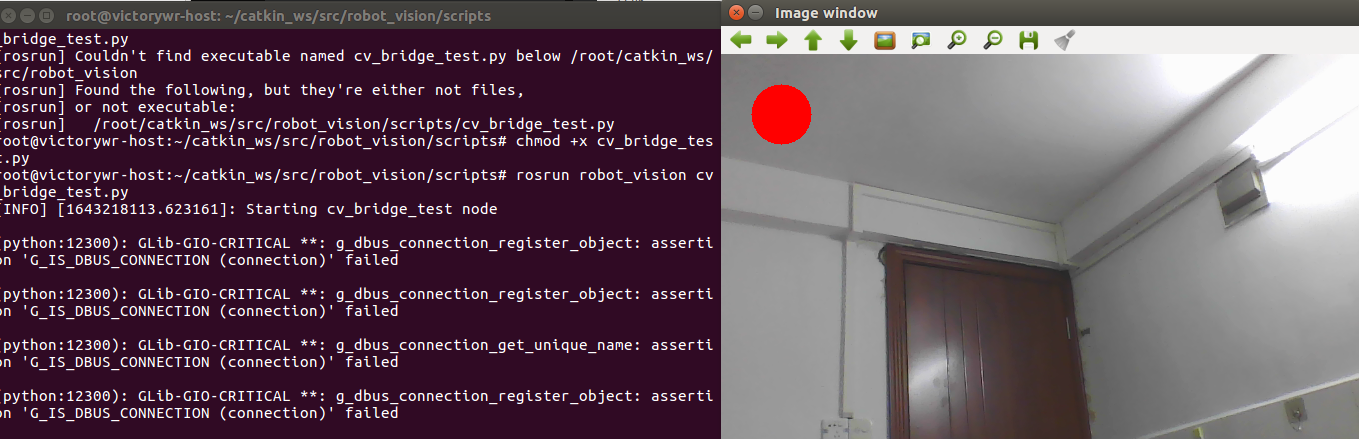
执行rosrun robot_vision cv_bridge_test.py可能遇到如下情况
提示没有执行权限或文件不存在,可此时文件是存在的,所以需要修改添加相关文件的可执行权限
输入如下指令:chmod +x cv_bridge_test.py

然后就能看到画面了
再输入如下指令
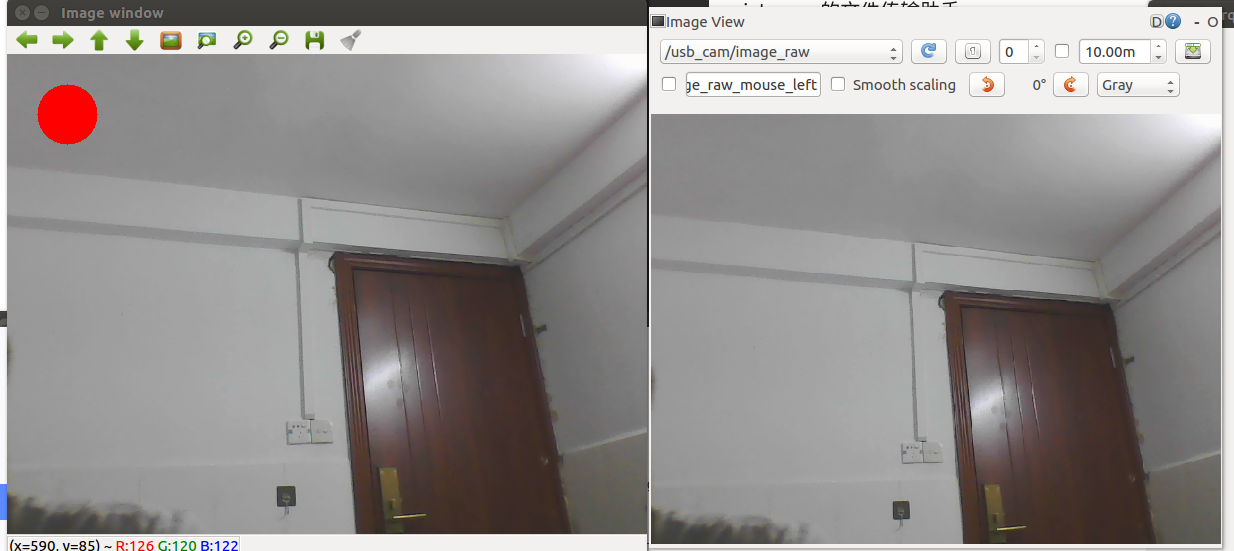
rqt_image_view
可以看到出现两个画面框,两者的关系是
左边是通过Cv_Bridge 将ROS图像转化成opencv图像数据后在图像左上角画了一个圆
右边是opencv将图像数据再次通过cv_bridge 转化成ROS图像数据的显示。
Code 实现原理
导入相关库

定义发布者与订阅者

订阅者订阅话题 /usb_cam/image_raw 的消息,消息类型是 Image (实际是from sensor_msgs.msg import Image) 关于image消息的类型定义可参考 ros调用摄像头
订阅者接受到消息数据后调用回调函数 callback
class image_converter:
def __init__(self):
# 创建cv_bridge,声明图像的发布者和订阅者
self.image_pub = rospy.Publisher("cv_bridge_image", Image, queue_size=1)
self.bridge = CvBridge()
self.image_sub = rospy.Subscriber("/usb_cam/image_raw", Image, self.callback)
def callback(self,data):
# 使用cv_bridge将ROS的图像数据转换成OpenCV的图像格式
try:
cv_image = self.bridge.imgmsg_to_cv2(data, "bgr8")
except CvBridgeError as e:
print e
# 在opencv的显示窗口中绘制一个圆,作为标记
(rows,cols,channels) = cv_image.shape
if cols > 60 and rows > 60 :
cv2.circle(cv_image, (60, 60), 30, (0,0,255), -1)
# 显示Opencv格式的图像
cv2.imshow("Image window", cv_image)
cv2.waitKey(3)
# 再将opencv格式额数据转换成ros image格式的数据发布
try:
self.image_pub.publish(self.bridge.cv2_to_imgmsg(cv_image, "bgr8"))
except CvBridgeError as e:
print e
if __name__ == '__main__':
try:
# 初始化ros节点
rospy.init_node("cv_bridge_test") # 节点
rospy.loginfo("Starting cv_bridge_test node")
image_converter()
rospy.spin()
except KeyboardInterrupt:
print "Shutting down cv_bridge_test node."
cv2.destroyAllWindows()
bridge.imgmsg_to_cv2 将ROS的图像数据格式转化成Opencv的图像数据格式
转化后调用Opencv的库在原图上画一个圆 cv2.circle(cv_image, (60, 60), 30, (0,0,255), -1)
最后通过发布者将处理过 bridge.cv2_to_imgmsg 接口函数 将Opencv数据图转化为ROS的图像数据格式再发布到系统中,如下可以看到发布者 发布的话题 cv_bridge_image



【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 地球OL攻略 —— 某应届生求职总结
· 周边上新:园子的第一款马克杯温暖上架
· Open-Sora 2.0 重磅开源!
· 提示词工程——AI应用必不可少的技术
· .NET周刊【3月第1期 2025-03-02】
2020-01-29 VS/C++/win10/opencv 神经网络数字识别