关于XACRO文件不能正常显示问题
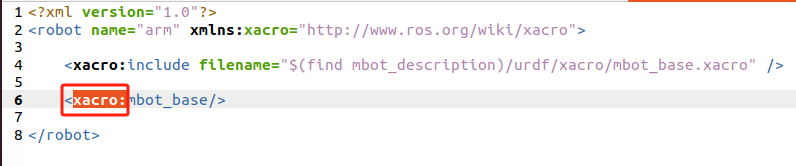
问题1:No link elements found in urdf file问题
在调用XACRO宏时需要加xacro:
缺少时不会报错,但是不能正常显示。
如:
若ROS 20.04版本(noetic 版本 ) 出现No link elements found in urdf file问题
则需要在调用位置加:
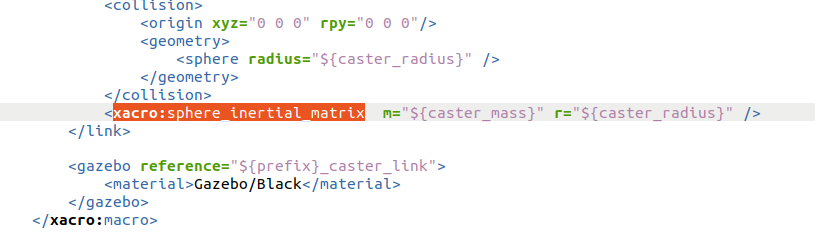
问题2:GAZEBO中不显示xacro模型,但是不报错
原因:ros-noetic和ros-melodic中的宏定义调用方法不同
使用了以前的宏定义,roslaunch就会无视这个宏定义的调用,就会出现模型不显示或者模型部分不显示。
修改为:
在具体的xacro文件中,将宏定义、调用宏定义、惯性矩阵调用宏前面都加上xacro: