LBP特征提取原理及代码实现
1 背景
LBP(Local Binary Pattern,局部二值模式)是一种用来描述图像局部纹理特征的算子,具有旋转不变形和灰度值不变形等显著优点。主要用于纹理特征提取,在人脸识别部分有较好的效果。
2 LBP特征原理
2.1概述
从94年T. Ojala, M.Pietikäinen, 和D. Harwood提出至今,LBP大致经历了三个版本。下面按照时间顺序进行介绍。(下面的First-LBP、Second-LBP..均为自己定义,只是为写技术文档方便,LBP作者并未定义。)
2.2First-LBP原理
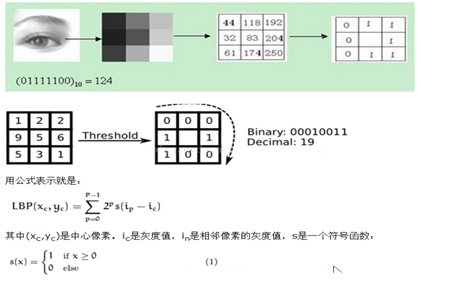
最初的LBP算子通过定义一个3x3的窗口,以窗口内中心点的像素值为标准,对比窗口内另8个点像素值的大小,大于为1,小于为0。8个点形成一个二进制数字(通常转换为十进制表示)即为中心点的LBP特征值。详细计算如下图:
通过上面得到的LBP算子具有很多缺点,后研究人员在LBP基础上进行不断改进。
2.3 Second-LBP原理
原始LBP算子计算区域为像素点的周围8个点,在图像尺寸发生改变时会出现很大的偏差,不能正确反映像素点周围的纹理信息。为适应不同尺寸纹理特征,LBP原作者将圆形邻域代替正方形邻域。同时增加了旋转不变的特性,在对LBP特征值的存储部分,也进行了改进。详细如下文。
2.3.1圆形LBP算子
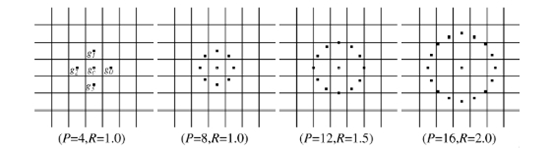
圆形LBP算子计算中,以像素点为圆心,R为半径,提取半径上P个采样点,根据2.2中像素值比较方法,进行像素值大小的比较,得到该点的LBP特征值。其中提取采样点的方法如下:
xt = xd + Rcos(2πp/P)
yt = yd - Rsin(2πp/P)
(xt,yt)为某个采样点,(xd,yd)为邻域中心点,p为第P个采样点,P为采样点的个数。得到采样点的坐标可能为小数,改进后的LBP采用双线性插值法进行计算该点的像素值:

几种不同半径不同采样点数量的LBP算子:
2.3.2旋转不变LBP特征:
上面通过采取圆形邻域的计算,一定程度上削弱了尺度改变的影响。研究人员在上面的基础上进一步扩展,使具备旋转不变的特征。
首先,在确定半径大小和采样点数目后,不断旋转圆形邻域内采样点的位置,得到一系列的LBP特征值,从这些LBP特征值中选择最小的值作为LBP中心像素点的LBP特征值,具体如下图:
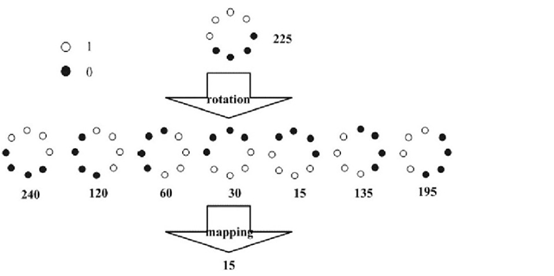
通过不断旋转,取最小值,使具备旋转不变特性。
2.3.3 Uniform Pattern LBP特征:
Uniform Pattern LBP特征也称为等价模式或均匀模式。对LBP特征值的存储方式上,进行了优化。详细如下。
假设对于半径为R的圆形邻域内提取P个采样点,会产生2p 种二进制表达方法,随着邻域内采样点数目的增加,二进制模式的种类以指数形式增加,不利于LBP特征值的存储、提取、分类和识别。LBP原作者提出一种“等价模式”对LBP算子进行降维。详细如下。
在实际图像中,绝大多数LBP模式只包括从0到1或从0到1的转变,LBP原作者将“等价模式”定义为当某个LBP特征值所对应的二进制数从0到1或从1到0的转变最多有两次时,该LBP所对应的二进制就称为一个等价模式。如00000000(0次跳变)、00000011(1次跳变)、10001111
(2次跳变)均为等价模式类。除等价模式类外均归为混合模式类。上述算法,使得模式数量由原来的2p种减少为P(P-1)+2+1种(P代表采样点的数量)。
实例介绍:
如采样点数为8,即256种LBP特征值,根据等价模式可分为59类:跳变0次——2个,跳变1次——0个,跳变2次——56个,跳变3….8次——1个。(跳变1次为0个是因为LBP作者把LBP二进制数字看做一个圆性的序列,故跳变1次为0个)
2.3.4 MB-LBP特征:
MB-LBP特征,全称为Multiscale Block LBP,由中科院的研究人员研究发表,原理与HOG特征提取有相似之处,接扫MB-LBP仅用于了解,下面是原理介绍。
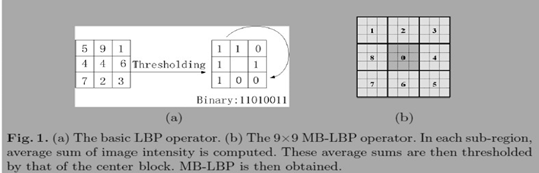
首先将图像分为分为多个块,再将每个小块分成多个区域,每个区域的灰度值为该区域内灰度值的平均值。在一个块内,将中心区域的灰度值大小与周围区域的灰度值大小进行比较形成LBP特征值。如下图:
作者对得到的MB-LBP特征值同样进行均值编码。首先,对得到的特征值采用直方图进行表示,计算每一种特征值的数量,进行排序,将排序在前63为的特征值看作是等价模式类,其他的为混合模式类,共64类。
2.4 Third-LBP原理
LBP的最后一步改进为LBPH即LBP特征统计直方图的使用,可用于机器学习特征的提取。这种表示方法由Ahonen等人提出,将LBP特征图像分成m个局部块,提取每个局部块的直方图,并依次连接在一起形成LBP特征的统计直方图。具体过程如下:
(1) 计算图像中每一像素点的LBP特征值。
(2) 图像进行分成多块。(Opencv中默认将LBP特征
图像分为8行8列64块区域。
(3) 计算每块区域的LBP特征值的直方图,并将直方图进行归一化。(横坐标为LBP特征值的表示方式,纵坐标为数量)
(4) 将上面计算的每块区域特征图像的直方图按顺序依次排列成一行,形成LBP特征向量。
(5) 用机器学习方法对LBP特征向量进行训练。
举例说明LBPH的维度:
采样点为8个,如果用的是原始的LBP或Extended LBP特征,其LBP特征值的模式为256种,则一幅图像的LBP特征向量维度为:64*256=16384维, 而如果使用的UniformPatternLBP特征,其LBP值的模式为59种,其特征向量维度为:64*59=3776维,可以看出,使用等价模式特征,其特征向量的维度大大减少, 这意味着使用机器学习方法进行学习的时间将大大减少,而性能上没有受到很大影响。
代码环节:
目前,Opencv内,暂无LBP简便的接口函数,如若使用,可观看下面源代码或使用下面代码。
LBP在人脸识别部分的应用:
#include<iostream>
#include<opencv2/opencv.hpp>
#include<opencv2/highgui/highgui.hpp>
#include<opencv2/imgproc/imgproc.hpp>
#include"opencv2/face.hpp"
using namespace std;
using namespace cv;
int main(int argc,char* argv[])
{
vector<Mat> images;
vector<int> labels;
char tdt[10];
for(int i=1;i<8;i++)
{
sprintf(tdt,"0%d.jpg",i);
Mat image = imread(tdt);
Mat grayImage;
cvtColor(image,grayImage,COLOR_BGR2GRAY);
images.push_back(grayImage);
labels.push_back(1);
}
for(int i=8;i<12;i++)
{
sprintf(tdt,"0%d.jpg",i);
Mat image = imread(tdt);
Mat grayImage;
cvtColor(image,grayImage,COLOR_BGR2GRAY);
images.push_back(grayImage);
labels.push_back(2);
}
Ptr<cv::face::FaceRecognizer> p ;
p->train(images,labels);
Mat test= imread("12.jpg");
Mat grayImage;
cvtColor(test,grayImage,COLOR_BGR2GRAY);
int result = p->predict(grayImage);
cout<<result<<endl;
system("pause");
return 0;
}
原始LBP特征计算代码:
template <typename _tp> void getOriginLBPFeature(InputArray _src,OutputArray _dst) { Mat src = _src.getMat(); _dst.create(src.rows-2,src.cols-2,CV_8UC1); Mat dst = _dst.getMat(); dst.setTo(0); for(int i=1;i<src.rows-1;i++) { for(int j=1;j<src.cols-1;j++) { _tp center = src.at<_tp>(i,j); unsigned char lbpCode = 0; lbpCode |= (src.at<_tp>(i-1,j-1) > center) << 7; lbpCode |= (src.at<_tp>(i-1,j ) > center) << 6; lbpCode |= (src.at<_tp>(i-1,j+1) > center) << 5; lbpCode |= (src.at<_tp>(i ,j+1) > center) << 4; lbpCode |= (src.at<_tp>(i+1,j+1) > center) << 3; lbpCode |= (src.at<_tp>(i+1,j ) > center) << 2; lbpCode |= (src.at<_tp>(i+1,j-1) > center) << 1; lbpCode |= (src.at<_tp>(i ,j-1) > center) << 0; dst.at<uchar>(i-1,j-1) = lbpCode; } } }
圆形LBP特征计算:
template <typename _tp> void getCircularLBPFeature(InputArray _src,OutputArray _dst,int radius,int neighbors) { Mat src = _src.getMat(); //LBP特征图像的行数和列数的计算要准确 _dst.create(src.rows-2*radius,src.cols-2*radius,CV_8UC1); Mat dst = _dst.getMat(); dst.setTo(0); //循环处理每个像素 for(int i=radius;i<src.rows-radius;i++) { for(int j=radius;j<src.cols-radius;j++) { //获得中心像素点的灰度值 _tp center = src.at<_tp>(i,j); unsigned char lbpCode = 0; for(int k=0;k<neighbors;k++) { //根据公式计算第k个采样点的坐标,这个地方可以优化,不必每次都进行计算radius*cos,radius*sin float x = i + static_cast<float>(radius * cos(2.0 * CV_PI * k / neighbors)); float y = j - static_cast<float>(radius * sin(2.0 * CV_PI * k / neighbors)); //根据取整结果进行双线性插值,得到第k个采样点的灰度值 //1.分别对x,y进行上下取整 int x1 = static_cast<int>(floor(x)); int x2 = static_cast<int>(ceil(x)); int y1 = static_cast<int>(floor(y)); int y2 = static_cast<int>(ceil(y)); //2.计算四个点(x1,y1),(x1,y2),(x2,y1),(x2,y2)的权重 //下面的权重计算方式有个问题,如果四个点都相等,则权重全为0,计算出来的插值为0 //float w1 = (x2-x)*(y2-y); //(x1,y1) //float w2 = (x2-x)*(y-y1); //(x1,y2) //float w3 = (x-x1)*(y2-y); //(x2,y1) //float w4 = (x-x1)*(y-y1); //(x2,y2) //将坐标映射到0-1之间 float tx = x - x1; float ty = y - y1; //根据0-1之间的x,y的权重计算公式计算权重 float w1 = (1-tx) * (1-ty); float w2 = tx * (1-ty); float w3 = (1-tx) * ty; float w4 = tx * ty; //3.根据双线性插值公式计算第k个采样点的灰度值 float neighbor = src.at<_tp>(x1,y1) * w1 + src.at<_tp>(x1,y2) *w2 + src.at<_tp>(x2,y1) * w3 +src.at<_tp>(x2,y2) *w4; //通过比较获得LBP值,并按顺序排列起来 lbpCode |= (neighbor>center) <<(neighbors-k-1); } dst.at<uchar>(i-radius,j-radius) = lbpCode; } } } //圆形LBP特征计算,效率优化版本,声明时默认neighbors=8 template <typename _tp> void getCircularLBPFeatureOptimization(InputArray _src,OutputArray _dst,int radius,int neighbors) { Mat src = _src.getMat(); //LBP特征图像的行数和列数的计算要准确 _dst.create(src.rows-2*radius,src.cols-2*radius,CV_8UC1); Mat dst = _dst.getMat(); dst.setTo(0); for(int k=0;k<neighbors;k++) { //计算采样点对于中心点坐标的偏移量rx,ry float rx = static_cast<float>(radius * cos(2.0 * CV_PI * k / neighbors)); float ry = -static_cast<float>(radius * sin(2.0 * CV_PI * k / neighbors)); //为双线性插值做准备 //对采样点偏移量分别进行上下取整 int x1 = static_cast<int>(floor(rx)); int x2 = static_cast<int>(ceil(rx)); int y1 = static_cast<int>(floor(ry)); int y2 = static_cast<int>(ceil(ry)); //将坐标偏移量映射到0-1之间 float tx = rx - x1; float ty = ry - y1; //根据0-1之间的x,y的权重计算公式计算权重,权重与坐标具体位置无关,与坐标间的差值有关 float w1 = (1-tx) * (1-ty); float w2 = tx * (1-ty); float w3 = (1-tx) * ty; float w4 = tx * ty; //循环处理每个像素 for(int i=radius;i<src.rows-radius;i++) { for(int j=radius;j<src.cols-radius;j++) { //获得中心像素点的灰度值 _tp center = src.at<_tp>(i,j); //根据双线性插值公式计算第k个采样点的灰度值 float neighbor = src.at<_tp>(i+x1,j+y1) * w1 + src.at<_tp>(i+x1,j+y2) *w2 + src.at<_tp>(i+x2,j+y1) * w3 +src.at<_tp>(i+x2,j+y2) *w4; //LBP特征图像的每个邻居的LBP值累加,累加通过与操作完成,对应的LBP值通过移位取得 dst.at<uchar>(i-radius,j-radius) |= (neighbor>center) <<(neighbors-k-1); } } } }
旋转不变圆形LBP特征计算:
template <typename _tp> void getRotationInvariantLBPFeature(InputArray _src,OutputArray _dst,int radius,int neighbors) { Mat src = _src.getMat(); //LBP特征图像的行数和列数的计算要准确 _dst.create(src.rows-2*radius,src.cols-2*radius,CV_8UC1); Mat dst = _dst.getMat(); dst.setTo(0); for(int k=0;k<neighbors;k++) { //计算采样点对于中心点坐标的偏移量rx,ry float rx = static_cast<float>(radius * cos(2.0 * CV_PI * k / neighbors)); float ry = -static_cast<float>(radius * sin(2.0 * CV_PI * k / neighbors)); //为双线性插值做准备 //对采样点偏移量分别进行上下取整 int x1 = static_cast<int>(floor(rx)); int x2 = static_cast<int>(ceil(rx)); int y1 = static_cast<int>(floor(ry)); int y2 = static_cast<int>(ceil(ry)); //将坐标偏移量映射到0-1之间 float tx = rx - x1; float ty = ry - y1; //根据0-1之间的x,y的权重计算公式计算权重,权重与坐标具体位置无关,与坐标间的差值有关 float w1 = (1-tx) * (1-ty); float w2 = tx * (1-ty); float w3 = (1-tx) * ty; float w4 = tx * ty; //循环处理每个像素 for(int i=radius;i<src.rows-radius;i++) { for(int j=radius;j<src.cols-radius;j++) { //获得中心像素点的灰度值 _tp center = src.at<_tp>(i,j); //根据双线性插值公式计算第k个采样点的灰度值 float neighbor = src.at<_tp>(i+x1,j+y1) * w1 + src.at<_tp>(i+x1,j+y2) *w2 + src.at<_tp>(i+x2,j+y1) * w3 +src.at<_tp>(i+x2,j+y2) *w4; //LBP特征图像的每个邻居的LBP值累加,累加通过与操作完成,对应的LBP值通过移位取得 dst.at<uchar>(i-radius,j-radius) |= (neighbor>center) <<(neighbors-k-1); } } } //进行旋转不变处理 for(int i=0;i<dst.rows;i++) { for(int j=0;j<dst.cols;j++) { unsigned char currentValue = dst.at<uchar>(i,j); unsigned char minValue = currentValue; for(int k=1;k<neighbors;k++) { //循环左移 unsigned char temp = (currentValue>>(neighbors-k)) | (currentValue<<k); if(temp < minValue) { minValue = temp; } } dst.at<uchar>(i,j) = minValue; } } }
均匀(等价)模式:
template <typename _tp> void getUniformPatternLBPFeature(InputArray _src,OutputArray _dst,int radius,int neighbors) { Mat src = _src.getMat(); //LBP特征图像的行数和列数的计算要准确 _dst.create(src.rows-2*radius,src.cols-2*radius,CV_8UC1); Mat dst = _dst.getMat(); dst.setTo(0); //LBP特征值对应图像灰度编码表,直接默认采样点为8位 uchar temp = 1; uchar table[256] = {0}; for(int i=0;i<256;i++) { if(getHopTimes(i)<3) { table[i] = temp; temp++; } } //是否进行UniformPattern编码的标志 bool flag = false; //计算LBP特征图 for(int k=0;k<neighbors;k++) { if(k==neighbors-1) { flag = true; } //计算采样点对于中心点坐标的偏移量rx,ry float rx = static_cast<float>(radius * cos(2.0 * CV_PI * k / neighbors)); float ry = -static_cast<float>(radius * sin(2.0 * CV_PI * k / neighbors)); //为双线性插值做准备 //对采样点偏移量分别进行上下取整 int x1 = static_cast<int>(floor(rx)); int x2 = static_cast<int>(ceil(rx)); int y1 = static_cast<int>(floor(ry)); int y2 = static_cast<int>(ceil(ry)); //将坐标偏移量映射到0-1之间 float tx = rx - x1; float ty = ry - y1; //根据0-1之间的x,y的权重计算公式计算权重,权重与坐标具体位置无关,与坐标间的差值有关 float w1 = (1-tx) * (1-ty); float w2 = tx * (1-ty); float w3 = (1-tx) * ty; float w4 = tx * ty; //循环处理每个像素 for(int i=radius;i<src.rows-radius;i++) { for(int j=radius;j<src.cols-radius;j++) { //获得中心像素点的灰度值 _tp center = src.at<_tp>(i,j); //根据双线性插值公式计算第k个采样点的灰度值 float neighbor = src.at<_tp>(i+x1,j+y1) * w1 + src.at<_tp>(i+x1,j+y2) *w2 + src.at<_tp>(i+x2,j+y1) * w3 +src.at<_tp>(i+x2,j+y2) *w4; //LBP特征图像的每个邻居的LBP值累加,累加通过与操作完成,对应的LBP值通过移位取得 dst.at<uchar>(i-radius,j-radius) |= (neighbor>center) <<(neighbors-k-1); //进行LBP特征的UniformPattern编码 if(flag) { dst.at<uchar>(i-radius,j-radius) = table[dst.at<uchar>(i-radius,j-radius)]; } } } } } //计算跳变次数 int getHopTimes(int n) { int count = 0; bitset<8> binaryCode = n; for(int i=0;i<8;i++) { if(binaryCode[i] != binaryCode[(i+1)%8]) { count++; } } return count; }
MB-LBP代码:
//MB-LBP特征的计算 void getMultiScaleBlockLBPFeature(InputArray _src,OutputArray _dst,int scale) { Mat src = _src.getMat(); Mat dst = _dst.getMat(); //定义并计算积分图像 int cellSize = scale / 3; int offset = cellSize / 2; Mat cellImage(src.rows-2*offset,src.cols-2*offset,CV_8UC1); for(int i=offset;i<src.rows-offset;i++) { for(int j=offset;j<src.cols-offset;j++) { int temp = 0; for(int m=-offset;m<offset+1;m++) { for(int n=-offset;n<offset+1;n++) { temp += src.at<uchar>(i+n,j+m); } } temp /= (cellSize*cellSize); cellImage.at<uchar>(i-cellSize/2,j-cellSize/2) = uchar(temp); } } getOriginLBPFeature<uchar>(cellImage,dst); }
MB-LBP编码的计算:
//求SEMB-LBP void SEMB_LBPFeature(InputArray _src,OutputArray _dst,int scale) { Mat dst=_dst.getMat(); Mat MB_LBPImage; getMultiScaleBlockLBPFeature(_src,MB_LBPImage,scale); //imshow("dst",dst); Mat histMat; int histSize = 256; float range[] = {float(0),float(255)}; const float* ranges = {range}; //计算LBP特征值0-255的直方图 calcHist(&MB_LBPImage,1,0,Mat(),histMat,1,&histSize,&ranges,true,false); histMat.reshape(1,1); vector<float> histVector(histMat.rows*histMat.cols); uchar table[256]; memset(table,64,256); if(histMat.isContinuous()) { //histVector = (int *)(histMat.data); //将直方图histMat变为vector向量histVector histVector.assign((float*)histMat.datastart,(float*)histMat.dataend); vector<float> histVectorCopy(histVector); //对histVector进行排序,即对LBP特征值的数量进行排序,降序排列 sort(histVector.begin(),histVector.end(),greater<float>()); for(int i=0;i<63;i++) { for(int j=0;j<histVectorCopy.size();j++) { if(histVectorCopy[j]==histVector[i]) { //得到类似于Uniform的编码表 table[j]=i; } } } } dst = MB_LBPImage; //根据编码表得到SEMB-LBP for(int i=0;i<dst.rows;i++) { for(int j=0;j<dst.cols;j++) { dst.at<uchar>(i,j) = table[dst.at<uchar>(i,j)]; } } }
LBPH特征图像的计算:
//计算LBP特征图像的直方图LBPH Mat getLBPH(InputArray _src,int numPatterns,int grid_x,int grid_y,bool normed) { Mat src = _src.getMat(); int width = src.cols / grid_x; int height = src.rows / grid_y; //定义LBPH的行和列,grid_x*grid_y表示将图像分割成这么些块,numPatterns表示LBP值的模式种类 Mat result = Mat::zeros(grid_x * grid_y,numPatterns,CV_32FC1); if(src.empty()) { return result.reshape(1,1); } int resultRowIndex = 0; //对图像进行分割,分割成grid_x*grid_y块,grid_x,grid_y默认为8 for(int i=0;i<grid_x;i++) { for(int j=0;j<grid_y;j++) { //图像分块 Mat src_cell = Mat(src,Range(i*height,(i+1)*height),Range(j*width,(j+1)*width)); //计算直方图 Mat hist_cell = getLocalRegionLBPH(src_cell,0,(numPattern-1),true); //将直方图放到result中 Mat rowResult = result.row(resultRowIndex); hist_cell.reshape(1,1).convertTo(rowResult,CV_32FC1); resultRowIndex++; } } return result.reshape(1,1); } //计算一个LBP特征图像块的直方图 Mat getLocalRegionLBPH(const Mat& src,int minValue,int maxValue,bool normed) { //定义存储直方图的矩阵 Mat result; //计算得到直方图bin的数目,直方图数组的大小 int histSize = maxValue - minValue + 1; //定义直方图每一维的bin的变化范围 float range[] = { static_cast<float>(minValue),static_cast<float>(maxValue + 1) }; //定义直方图所有bin的变化范围 const float* ranges = { range }; //计算直方图,src是要计算直方图的图像,1是要计算直方图的图像数目,0是计算直方图所用的图像的通道序号,从0索引 //Mat()是要用的掩模,result为输出的直方图,1为输出的直方图的维度,histSize直方图在每一维的变化范围 //ranges,所有直方图的变化范围(起点和终点) calcHist(&src,1,0,Mat(),result,1,&histSize,&ranges,true,false); //归一化 if(normed) { result /= (int)src.total(); } //结果表示成只有1行的矩阵 return result.reshape(1,1); }

 浙公网安备 33010602011771号
浙公网安备 33010602011771号