一文教你快速搞懂速度曲线规划之T形曲线(超详细+图文+推导+附件代码)
运动控制中常用的T速度曲线规划的原理和程序实现,最后给出了测试结果;
如果本文帮到了您,请帮忙点个赞 👍👍👍;
如果本文帮到了您,请帮忙点个赞 👍👍👍;
如果本文帮到了您,请帮忙点个赞 👍👍👍;
1 前言
在伺服系统以及控制系统的加减速动作中,为了让速度更加平滑,可以引入T型速度曲线规划(T-curve velocity profile),T曲线是工业界广泛采用的形式,它是一种时间最优的曲线。一般情况,曲线加速和减速的过程是对称的,设给定速度上限为vmaxv_{max}vmax。加速度上限为amaxa_{max}amax,被控对象从A点运动到B点,要求生成的轨迹在这些条件下时间最优1。
2 理论分析
在整体系统高速启动,制动的状态下,可以提高整体系统的性能。每当系统完成一个动作的时候,总共包括三个过程,匀加速,匀速,匀减速,具体如下图所示;

根据vvv是否到达vmaxv_{max}vmax,这里通常要分为两种情况来讨论;
- 第一种:速度到达vmaxv_{max}vmax,最终速度曲线为梯形;
- 第二种:速度没有到达vmaxv_{max}vmax,最终速度曲线为三角形;
下面仅讨论第一种情况;
这里时间使用ttt加脚标来表示,位置量使用ppp来表示,加速度使用aaa来表示
- 设加速时间长度为tat_ata:t0—t1t_0—t_1t0—t1;
- 因为加速和减速的过程是对称的,所以减速带的时间长度也为tat_ata:t2—t3t_2—t_3t2—t3;
- 最大速度vmaxv_{max}vmaxc持续的时间长度为tmt_mtm:t1—t2t_1—t_2t1—t2;
在实际的系统中,梯形曲线通常需要设置三个参数:
- 最大速度vmaxv_{max}vmax;
- 加速度amaxa_{max}amax;
- 最终位置值PfinalP_{final}Pfinal,下面简称为PfP_fPf;
所以这三个参数可以作为已知量来处理;
下面简单推到这三个参数之间的关系:
设加减速区域经过的位置量为PaP_aPa,则:
Pa=12amta2P_a = \cfrac{1}{2}a_mt_a^2Pa=21amta2
设最大区域经过的位置量为PmP_mPm,则:
{Pm=vmtm⋯①Pf=Pa+Pm+Pa⋯②ta=vmaxamax⋯③tm=(Pf−2Pa)vmax⋯④\begin{cases}P_m=v_mt_m \cdots ①\\
\\
P_f = P_a+P_m+P_a \cdots ②\\
\\
t_a = \cfrac{v_{max}}{a_{max}} \cdots ③\\
\\
t_m = \cfrac{(P_f - 2P_a)}{v_{max}} \cdots ④\end{cases}⎩⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎧Pm=vmtm⋯①Pf=Pa+Pm+Pa⋯②ta=amaxvmax⋯③tm=vmax(Pf−2Pa)⋯④
所以输出的位置量满足以下关系:
P(t)={12amt2,t0≤t≤t112amta2+vm(t−ta),t1<t≤t212amta2+vmtm+12am(t−tm−ta)2,t2<t≤t3P(t) = \begin{cases}\cfrac{1}{2}a_mt^2,t_0 \le t \le t_1 \\
\\
\cfrac{1}{2}a_mt_a^2 + v_m(t-t_a),t_1 < t \le t_2 \\
\\
\cfrac{1}{2}a_mt_a^2 + v_mt_m+\cfrac{1}{2}a_m(t-t_m-t_a)^2,t_2 < t \le t_3\\
\end{cases}P(t)=⎩⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎧21amt2,t0≤t≤t121amta2+vm(t−ta),t1<t≤t221amta2+vmtm+21am(t−tm−ta)2,t2<t≤t3
最终可以通过P(t)P(t)P(t)的关系以及①②③④式编写程序得到T型速度曲线规划。
3 matlab 实现
matlab的算法实现如下;
%% 梯形速度曲线
%% https://blog.csdn.net/u010632165
% Vm 最大熟读
% Am 最大加速度
% P 位置信号
%%
function t_curve(Vm,Am,P)
%设置初始条件
t0=0;
P0=0;
Pf=P; %最终位置
v_max=Vm; %最大速度
a_max=Am; %最大加速度
ta=v_max/a_max; %加速和减速需要的时间
Pa=0.5*a_max*ta^2; %加速或减速产生的位置量
t_m=(Pf-2*Pa)/v_max;%最大速度需要的时间
t_f=t_m+2*ta; %到达目标位置所需要的时间
t=t0:0.1:t_f;
n=size(t);
Pt=zeros(n(2),1);
i=1;
% 判断速度曲线规划属于哪一种情况
if t_f-2*ta>0
%达到最大速度,梯形
for t=t0:0.1:t_f
if t<=ta
Pt(i)=P0+0.5*a_max*t*t;
elseif ta<t && t<=t_f-ta
Pt(i)=P0+0.5*a_max*ta*ta+a_max*ta*(t-ta);
else
Pt(i)=Pf-0.5*a_max*(t_f-t)^2;
end
i=i+1;
end
else
% 未达到最大速度,速度曲线为三角形
ta=sqrt( (Pf-P0)/a_max);
t_f=2*ta;
for t=t0:0.1:t_f
if t<=ta
Pt(i)=P0+0.5*a_max*t*t;
else
Pt(i)=Pf-0.5*a_max*(t_f-t)^2;
end
i=i+1;
end
end
subplot(3,1,1);
plot(Pt);
legend('位置曲线')
subplot(3,1,2);
plot(diff(Pt))
legend('速度曲线')
subplot(3,1,3);
plot(diff(diff(Pt)))
legend('加速度曲线')
end
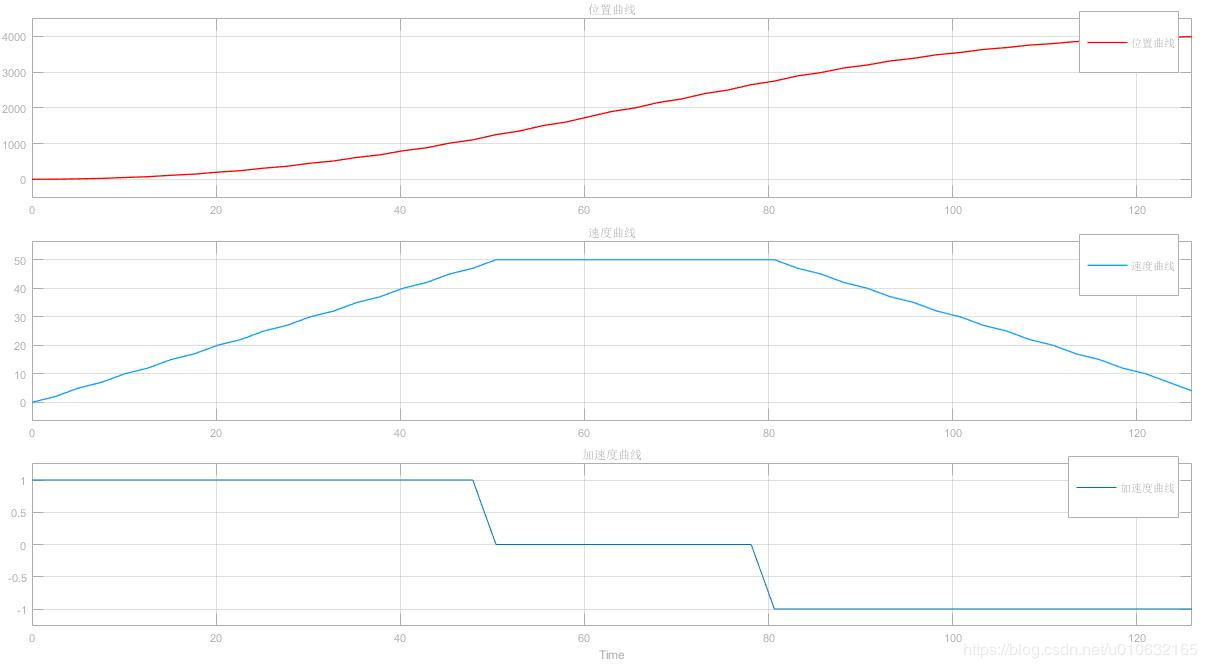
4 测试结果
在matlab的命令终端输入以下指令;
t_curve(3,1,20)
设置最大速度为3,加速度为1,最终位置为20;
仿真曲线如下所示;

5 c语言实现
在simulink中调用了c程序进行仿真测试,《一文教你快速学会在matlab的simulink中调用C语言进行仿真 》具体代码如下所示;
void sfun_myc_Outputs_wrapper(const real_T *u0,
const real_T *u1,
const real_T *u2,
const real_T *t,
real_T *y0,
real_T *y1,
real_T *y2)
{
/* %%%-SFUNWIZ_wrapper_Outputs_Changes_BEGIN --- EDIT HERE TO _END */
/* This sample sets the output equal to the input
y0[0] = u0[0];
For complex signals use: y0[0].re = u0[0].re;
y0[0].im = u0[0].im;
y1[0].re = u1[0].re;
y1[0].im = u1[0].im;
*/
/* %%%-SFUNWIZ_wrapper_Outputs_Changes_END --- EDIT HERE TO _BEGIN */
int Am = u0[0];
int Vm = u1[0];
int Pf = u2[0];
int T = t[0];
int Ta = Vm/Am;
int Tm = (Pf - Am*Ta*Ta)/Vm;
int Tf = 2*Ta+Tm;
printf("%d\r\n",Tf);
//梯形
if(Tm>0){
if(T <= Ta){
y0[0] = 0.5*Am*T*T;
y1[0] = Am*T;
y2[0] = Am;
}else if(T<=(Ta+Tm)){
y0[0] = 0.5*Am*Ta*Ta + Vm*(T-Ta);
y1[0] = Vm;
y2[0] = 0;
}else if(T<=(Ta+Tm+Ta)){
y0[0] = 0.5*Am*Ta*Ta + Vm*Tm + 0.5*Am*(T-Ta-Tm)*(T-Ta-Tm);
y1[0] = Vm-Am*(T-Ta-Tm);
y2[0] = -Am;
}
}else{
//三角形
Ta = sqrt(Pf/Am);
if(T<Ta){
y0[0] = 0.5*Am*T*T;
y1[0] = Am*T;
y2[0] = Am;
}else{
y0[0] = 0.5*Am*Ta*Ta + 0.5*Am*(T-Ta)*(T-Ta);
y1[0] = Am*Ta - Am*(T-Ta);
y2[0] = -Am;
}
}
}
仿真结果如下;

6 总结
T曲线是工业界广泛采用的形式,在运动控制上,相比较S曲线,它算法的复杂度更低,所占用的系统资源更少,但是在恒加速的拐点会出现过冲,这里S曲线就可以减少这种情况的发生。本文写的相对比较简单,笔者能力有限,难免出现错误和纰漏,希望大佬不吝赐教。
文中难免有错误和纰漏之处,请大佬们不吝赐教
创作不易,如果本文帮到了您;
请帮忙点个赞 👍👍👍;
请帮忙点个赞 👍👍👍;
请帮忙点个赞 👍👍👍;
-
《S/T曲线速度规划在定点DSP上的实现》 ↩︎

 浙公网安备 33010602011771号
浙公网安备 33010602011771号