ROS之RVIZ plugin
https://www.guyuehome.com/38534
0. 简介
之前尝试过使用plugin来实现功能的模块化.同时在ROS中,为了使核心的代码是只留下输入输出接口的,所以我们使用plugin来实现.so文件的封装以及动态调取.但是在近期接触后发现在RVIZ的插件开发中,其核心也是plugin插件性质,这里再开一篇文章来进行介绍.详细的配置可以在文章:ROS设置plugin插件中看到.
1. 内容介绍
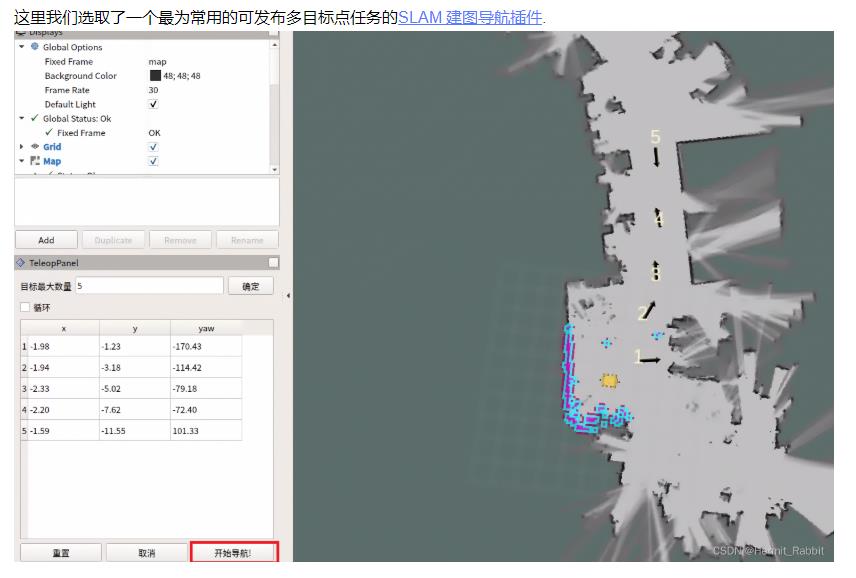
rviz是ROS官方提供的一款3D可视化工具,几乎我们需要用到的所有机器人相关数据都可以在rviz中展现。当然由于机器人系统的需求不同,很多时候rviz中已有的一些功能仍然无法满足我们的需求,这个时候rviz的plugin机制就派上用场了。rviz可以使用插件机制来扩展丰富的功能,我们完全可以在rviz的基础上,打造属于我们自己的机器人人机界面。
在ros的编程中,ROS中的可视化工具绝大部分都是基于Qt进行开发的,rviz的plugin也不例外。而且古月老师也向我们展示了一个最基础的plugin的开发过程.
欢迎讨论,相互学习。
cdtxw@foxmail.com

 浙公网安备 33010602011771号
浙公网安备 33010602011771号