
OpenCV26HoughCircles 霍夫圆变换原理及圆检测
HoughCircles 霍夫圆变换原理及圆检测
霍夫圆变换的基本原理与霍夫线变换大体类似
对直线来说,一条直线能由极径极角(r,θ)表示,而对于圆来说,我们需要三个参数:圆心(a,b),半径 r
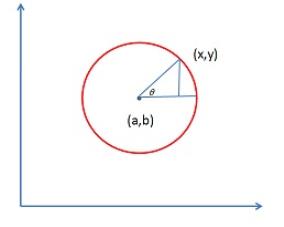
笛卡尔坐标系中圆的方程为:
(x-a)2 + (y-b)2 = r2
化简便可得到:
a = x - r·cosθ
b = y - r·sinθ
- 对于(x0,y0),我们可以将通过这一点的所有圆统一定义为:
a = x0 - r·cosθ
b = y0 - r·sinθ
这就意味着每一组(a,b,r)代表一个通过点(x0,y0)的圆。
-
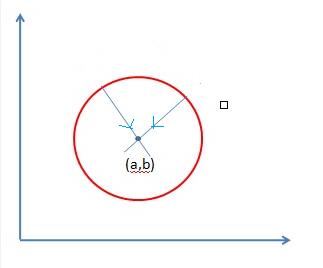
对于一个给定点(x0,y0),我们可以在三维直角坐标系中,绘出所有通过它的圆。最终我们将得到一条三维的曲线。
-
我们可以对图像中所有的点进行上述操作.。如果两个不同点进行上述操作后得到的曲线在空间 a - b - r 相交, 即它们有一组公共的(a,b,r),这就意味着它们在同一个圆上。
-
越多曲线交于一点,也就意味着这个交点表示的圆由更多的点组成。我们可以设置一个阈值,来决定多少条曲线交于一点我们才认为检测到了一个圆。
-
这就是霍夫圆变换要做的.。它追踪图像中每个点对应曲线间的交点.。如果交于一点的曲线的数量超过了阈值, 那么可以认为这个交点所代表的参数(a,b,r)在原图像中为一个圆。
以上是标准霍夫圆变换实现算法。问题是它的累加面(绘制三维曲线的空间)是一个三维的空间,意味着比霍夫线变换需要更多的计算消耗。OpenCV 霍夫圆变换对标准霍夫圆变换做了运算上的优化。它采用的是 “霍夫梯度法”。
霍夫梯度法的原理
- 估计圆心
1.把原图做一次 Canny 边缘检测,得到边缘检测的二值图。
2.对原始图像执行一次 Sobel 算子,计算出所有像素的邻域梯度值。
3.初始化圆心空间 N(a,b),令所有的 N(a,b)=0。
4.遍历 Canny 边缘二值图中的所有非零像素点,沿着梯度方向 ( 切线的垂直方向 )画线,将线段经过的所有累加器中的点 (a,b) 的 N(a,b)+=1。
5.统计排序 N(a,b),得到可能的圆心(N(a,b) 越大,越有可能是圆心)
- 估计半径(针对某一个圆心 (a,b))
1.计算 Canny 图中所有非 0 点距离圆心的距离。
2.距离从小到大排序,根据阈值,选取合适的可能半径(比如 3 和 3.5 都被划为半径值 3 中)。
3.初始化半径空间 r, N(r)=0。
4.遍历 Canny 图中的非 0 点,N( 距离 )+=1。
5.统计得到可能的半径值(N(r) 越大,说明这个距离值出现次数越多,越有可能是半径值)。
霍夫梯度法缺点
1.在霍夫梯度法中,我们使用 Sobel 导数来计算局部梯度,那么随之而来的假设是,其可以视作等同于一条局部切线,并这个不是一个数值稳定的做法。在大多数情况下,这样做会得到正确的结果,但或许会在输出中产生一些噪声。
2.在边缘图像中的整个非0像素集被看做每个中心的候选部分。因此,如果把累加器的阈值设置偏低,算法将要消耗比较长的时间。
3.因为每一个中心只选择一个圆,如果有同心圆,就只能选择其中的一个。
4.因为中心是按照其关联的累加器值的升序排列的,并且如果新的中心过于接近之前已经接受的中心的话,就不会被保留下来。且当有许多同心圆或者是近似的同心圆时,霍夫梯度法的倾向是保留最大的一个圆。可以说这是一种比较极端的做法,因为在这里默认Sobel导数会产生噪声,若是对于无穷分辨率的平滑图像而言的话,这才是必须的。
霍夫圆变换:HoughCircles 函数
HoughCircles 函数可以利用霍夫变换算法检测出灰度图中的圆。它相比之前的 HoughLines 和HoughLinesP,比较明显的一个区别是不需要源图像是二值的,而 HoughLines 和HoughLinesP 都需要源图像是二值图像。
void HoughCircles(InputArray image, OutputArray circles, int method, double dp, double minDist, double param1 = 100, double param2 = 100, int minRadius = 0, int maxRadius = 0);
- image,输入图像,即源图像,需要为 8 位的灰度单通道图像。
- circles,调用 HoughCircles 函数后此参数存储了检测到的圆的输出矢量,每个矢量由包含了 3 个元素的浮点矢量(x,y,radius)表示。
- method,使用的检测方法,目前 OpenCV 中就霍夫梯度法一种可以使用,标识符为 HOUGH_GRADIENT。
- dp,累加面分辨率(大小) = 原始图像分辨率(大小) × 1/dp。默认 dp = 1 时,两者分辨率相同。
- minDist,两个圆心之间的最小距离。若两圆心距离 < minDist,则认为是同一个圆。
- param1,Canny 边缘检测的高阈值,低阈值被自动置为高阈值的一半,默认为 100。
- param2,累加平面某点是否是圆心的判定阈值。它越大,能通过检测的圆就更接近完美的圆形,默认为 100。
- minRadius,圆半径的最小值。默认为 0。
- maxRadius,圆半径的最大值,默认为 0。
此函数可以很容易地检测出圆心,但是可能找不到合适地圆半径。我们可以通过 minRadius 和 maxRadius 两个参数指定最大和最小圆半径,来辅助圆检测的结果。或者可以直接忽略返回半径,让二者均为默认值,只用 HoughCircles 函数检测出圆心,用额外步骤进一步确定半径。
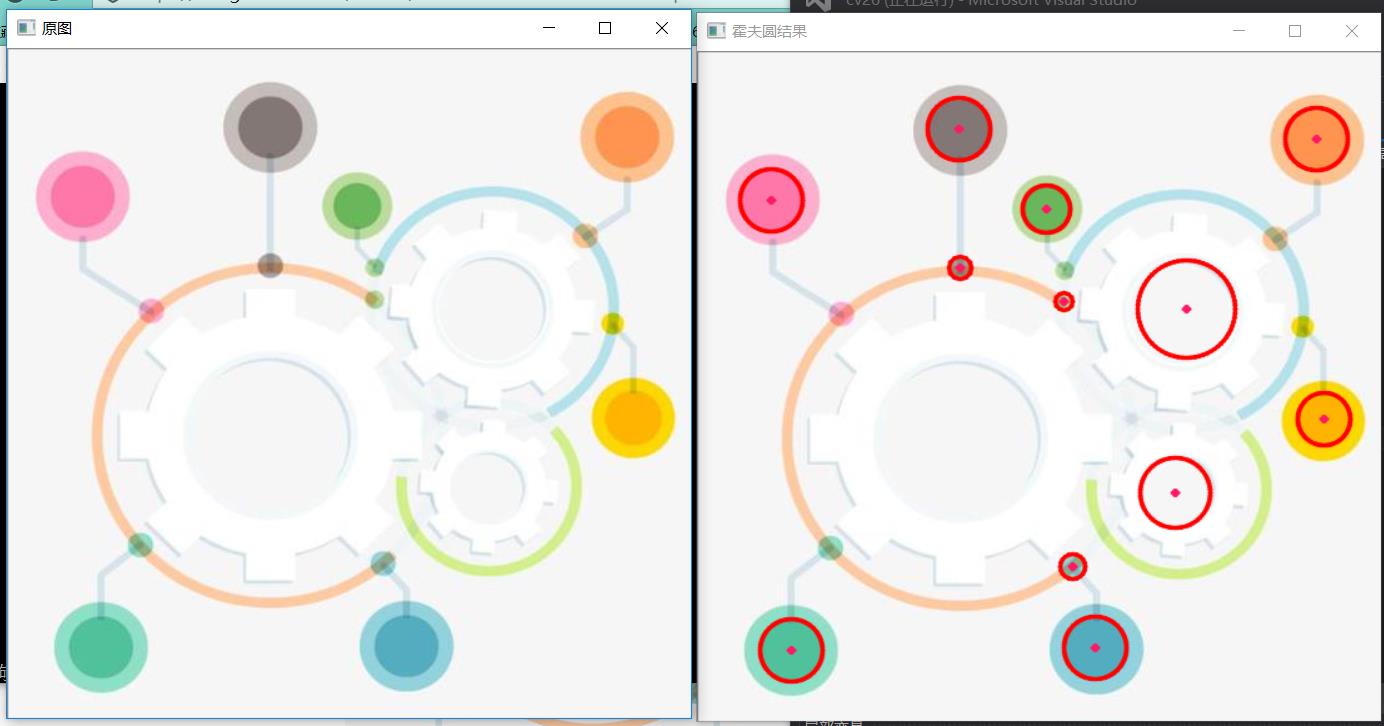
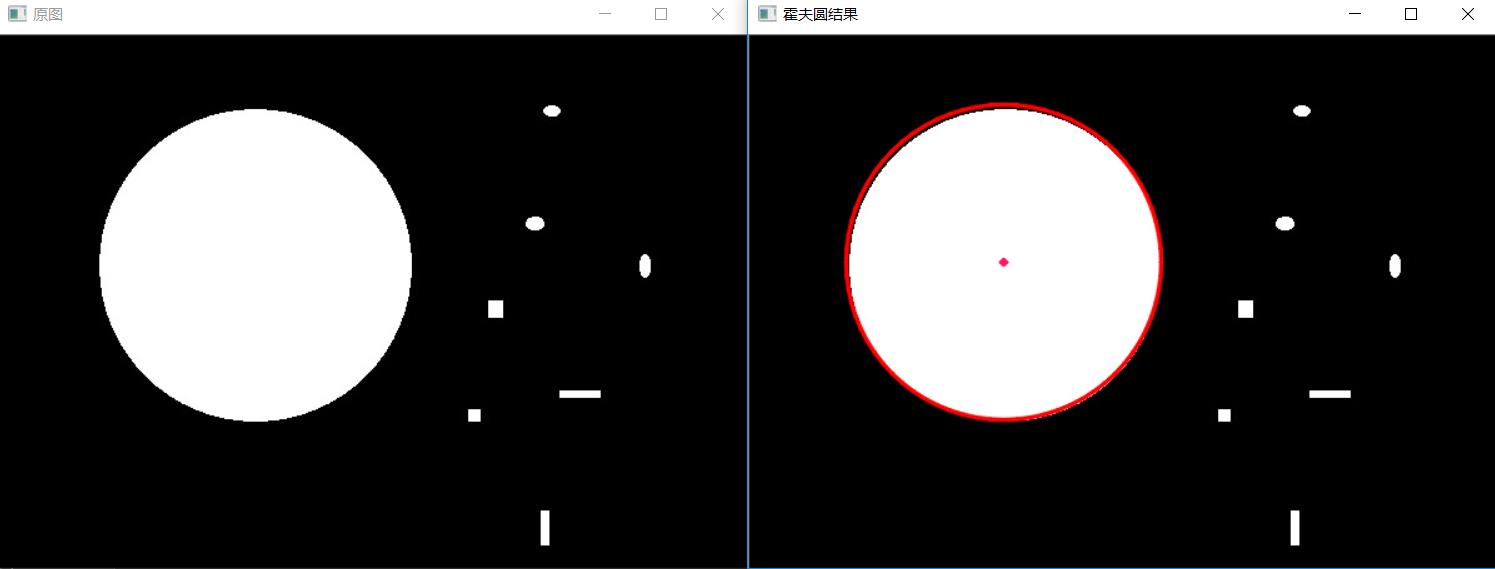
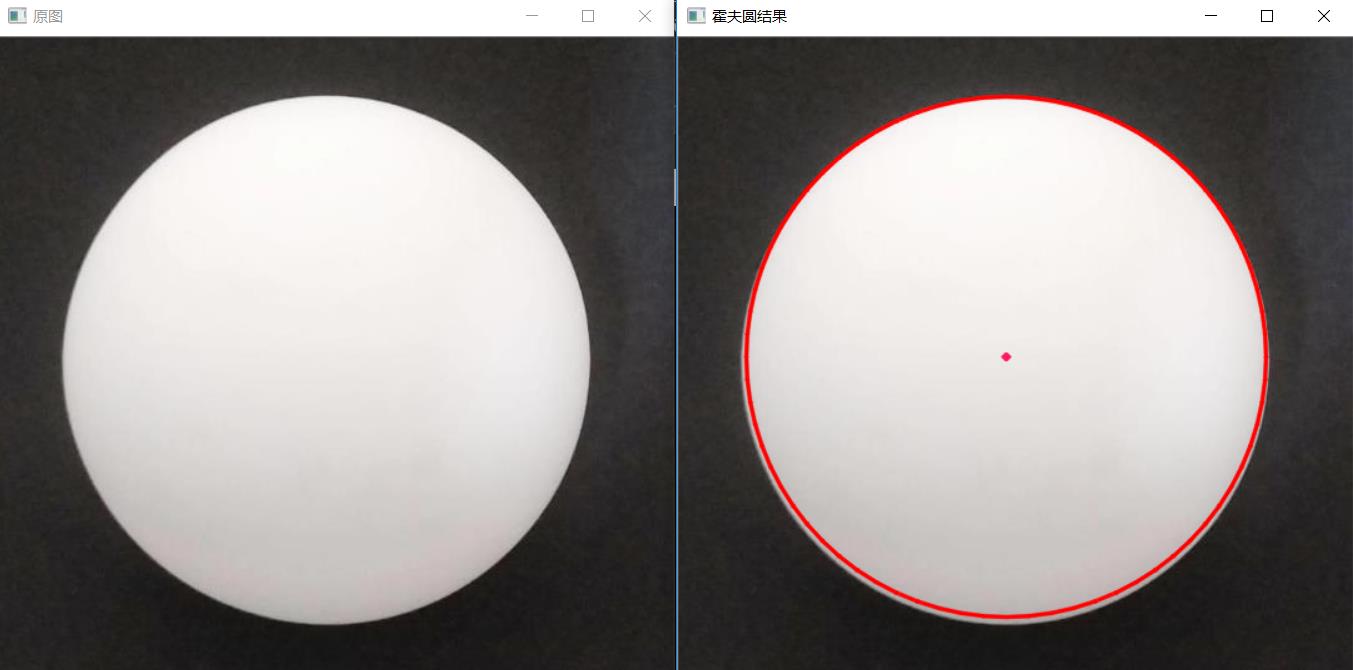
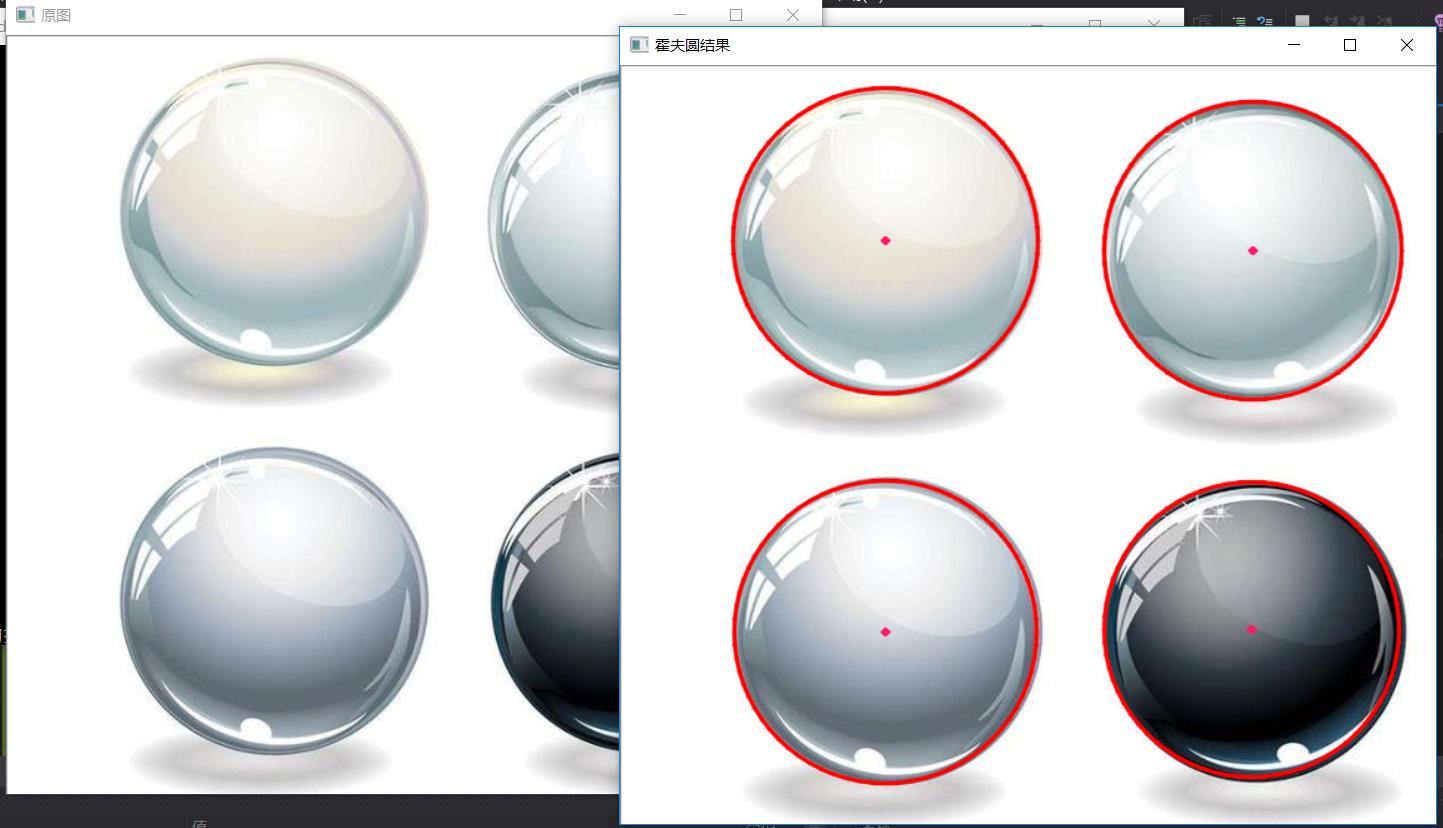
/*OpenCV26霍夫圆检测 */ #include <opencv2\opencv.hpp> #include <iostream> using namespace std; using namespace cv; Mat src; Mat src2; Mat dst; char *output_name = "霍夫圆结果"; int main(int argc, char *argv[]) { //src = imread("e:\\pictures\\梁平柚.jpg"); // src = imread("e:\\pictures\\多个圆.jpg"); src = imread("e:\\pictures\\blk_bg_sample.jpg"); //src = imread("e:\\pictures\\圆形.jpg"); //src = imread("e:\\pictures\\球形图.jpg"); if (!src.data) { printf("failed to load image"); return -1; } namedWindow("原图",CV_WINDOW_AUTOSIZE); namedWindow(output_name,CV_WINDOW_AUTOSIZE); imshow("原图",src); Mat m_output; //中值滤波,去噪声 medianBlur(src,m_output,3); //转灰度图像 cvtColor(m_output,m_output,CV_BGR2GRAY); //霍夫圆检测 vector<Vec3f> maybe_circles;//检测出有几个圆 //30表示,达到30,可能是圆 //HoughCircles(m_output,maybe_circles,CV_HOUGH_GRADIENT,1,10,100,30,5,50);//多个圆 // xx xx method dp,minDist,p1 ,param2, min,max(半径最大值,0是默认值) //minDist 和 param2 数值的设定是关键,第5,7个参数 //HoughCircles(m_output, maybe_circles, CV_HOUGH_GRADIENT, 1, 100, 100, 80 ,0, 0 );//圆形,球形图 HoughCircles(m_output, maybe_circles, CV_HOUGH_GRADIENT, 1, 100, 100, 28, 0, 0);//blk_bg_sample src.copyTo(dst); for (size_t i = 0; i < maybe_circles.size(); i++) { Vec3f cc = maybe_circles[i]; circle(dst,Point(cc[0],cc[1]),cc[2],Scalar(0,0,255),2,LINE_AA); circle(dst, Point(cc[0], cc[1]), 2, Scalar(99, 23, 255), 2, LINE_AA); } imshow(output_name,dst); waitKey(0); return 0; }

 浙公网安备 33010602011771号
浙公网安备 33010602011771号