麦克纳姆轮和连续切换轮
 一、wheel and infantry
二、麦克纳姆轮和连续切换轮
解算,图解
一、wheel and infantry
二、麦克纳姆轮和连续切换轮
解算,图解
一、wheel and infantry
见过最最普通的麦轮步兵,还有舵轮步兵,还有大轮毂和双足轮腿平衡步兵,然后貌似没了。哦对对对,还有万向轮车架。之前在放工具的B间还见到连续切换轮,只是没见过在车上的连续切换轮。
二、麦克纳姆轮和连续切换轮
一般情况下,在平面上移动的物体可以实现前后、 左右和自转 3 个自由度的运动。若具有完全的3个自由度,则称为全方位移动平台,这种平台非常适合工作在空间狭窄有限、对平台的机动性要求高的场合中。在竞赛机器人和特殊工种机器人中,全向移动经常是一个必需的功能。「全向移动」意味着可以在平面内做出任意方向平移同时自转的动作。为了实现全向移动,一般机器人会使用「全向轮」(Omni Wheel)或「麦克纳姆轮」(Mecanum Wheel)这两种特殊轮子。
连续切换轮与麦克纳姆轮的共同点在于他们都由两大部分组成:轮毂和辊子。轮毂是整个轮子的主体支架,辊子则是安装在轮毂上的鼓状物。连续切换轮的轮毂轴与辊子转轴相互垂直,而麦克纳姆轮的轮毂轴与辊子转轴呈 45° 角。连续切换轮与麦克纳姆轮在结构、力学特性、运动学特性上都有差异,其本质原因是轮毂轴与辊子转轴的角度不同。


1.连续切换轮
(1)整体介绍
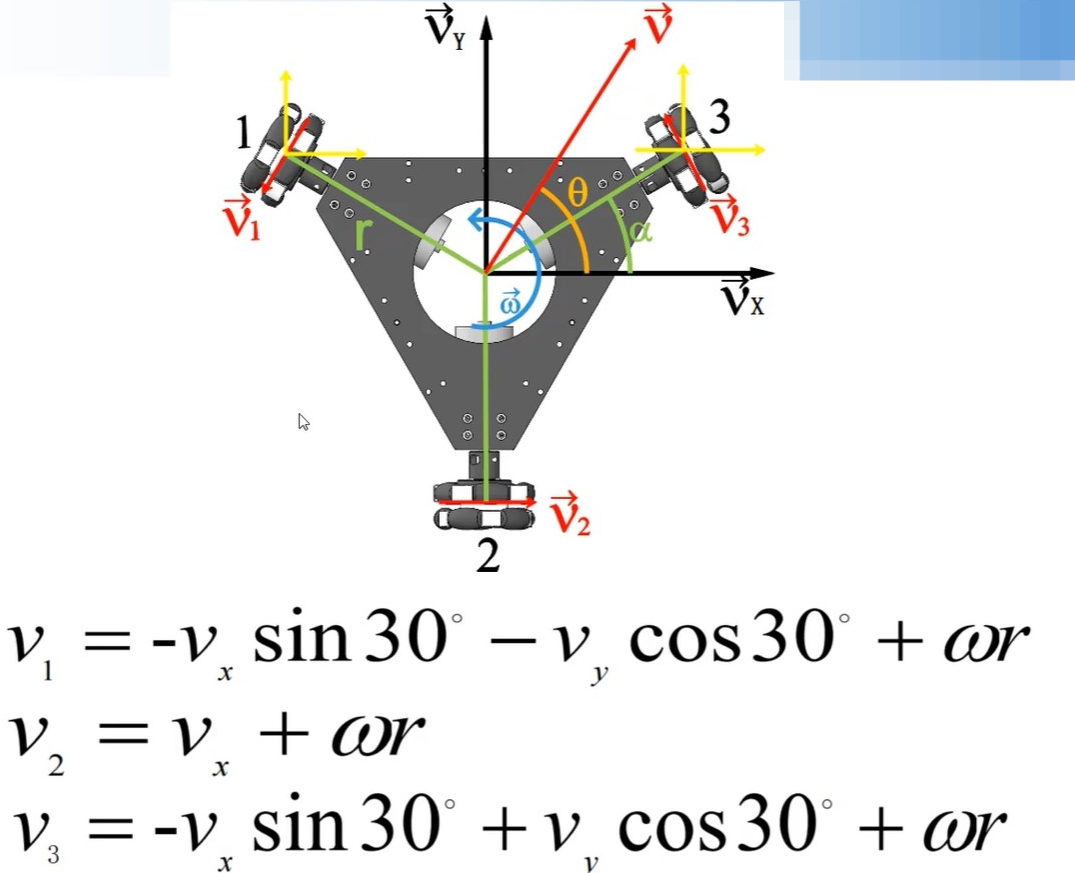
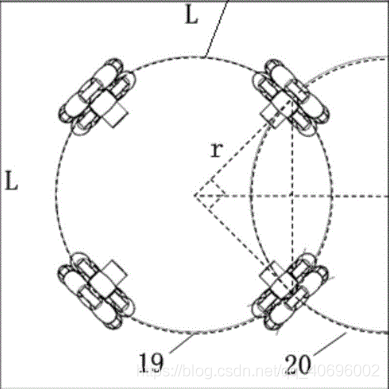
如图所示连续切换轮的轮辐上有两种滚子,分为内圈和外圈,可以绕与轮盘轴垂直的轴心转动,具有公共的切面方向,这样既保证了在轮盘滚动时同地面的接触点高度不变,避免机器人振动,也保证了在任意位置都可以实现沿与轮盘轴平行方向的自由滚动。但其结构复杂、装配难度大是显而易见的 。
(2)安装和解算
全向轮的安装只能在特定的角度30, 60 ,45。
2.麦克纳姆轮
(1)整体介绍
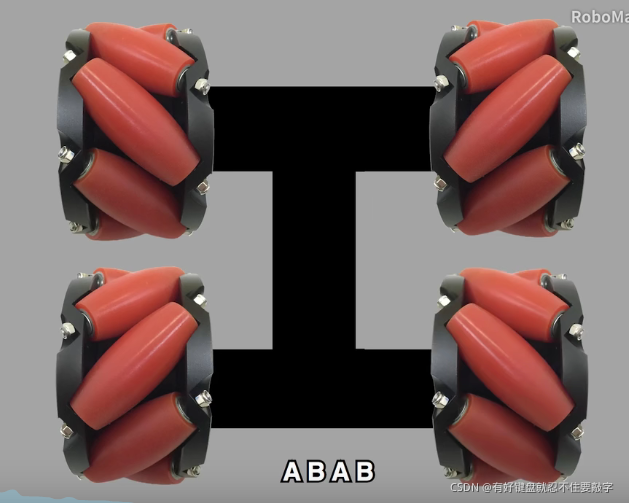
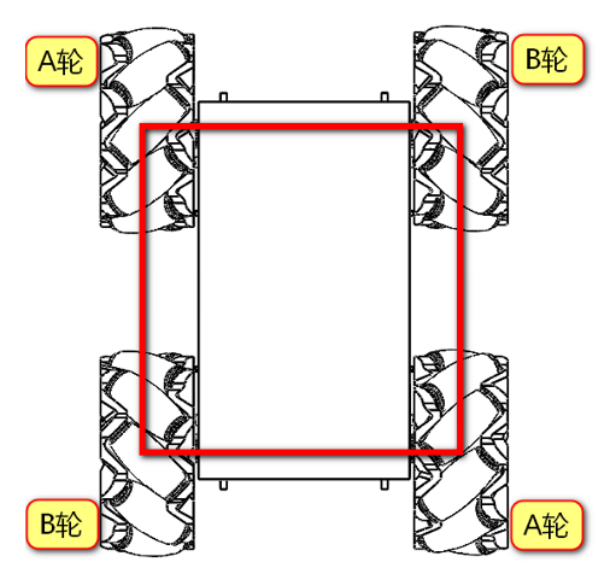
对于四轮小车来说,一套麦克纳姆轮至少应含有两种不同的轮子。
左轮:正转可以向左前方运动,反转向右后方的轮
右轮:正转向右前方运动,反转向左后方的轮
注意是运动方向,与给地面摩擦力的方向相反
(2)两种安装方式
"X"形: "O"形:
(3)麦轮的解算

rotate_speed_add是针对于小陀螺偏心问题的补偿系数。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号