

Abstract
提出一个轻量级定位方案, 基于便宜的相机和紧致的语义地图:
- lane line
- crosswalk
- ground sign
- stop line
语义地图的平均大小是: 36kb/km.
1. Introduction
量产车: production car
- 点云地图占太多memory了.
- HD map占用了太多人力, 很难保证及时的更新.
2. Literature Review
A. Traditional Visual SLAM
....
B. Road-based Localization
本文提出了在车建图, 在云端融合/更新.
3. System overview
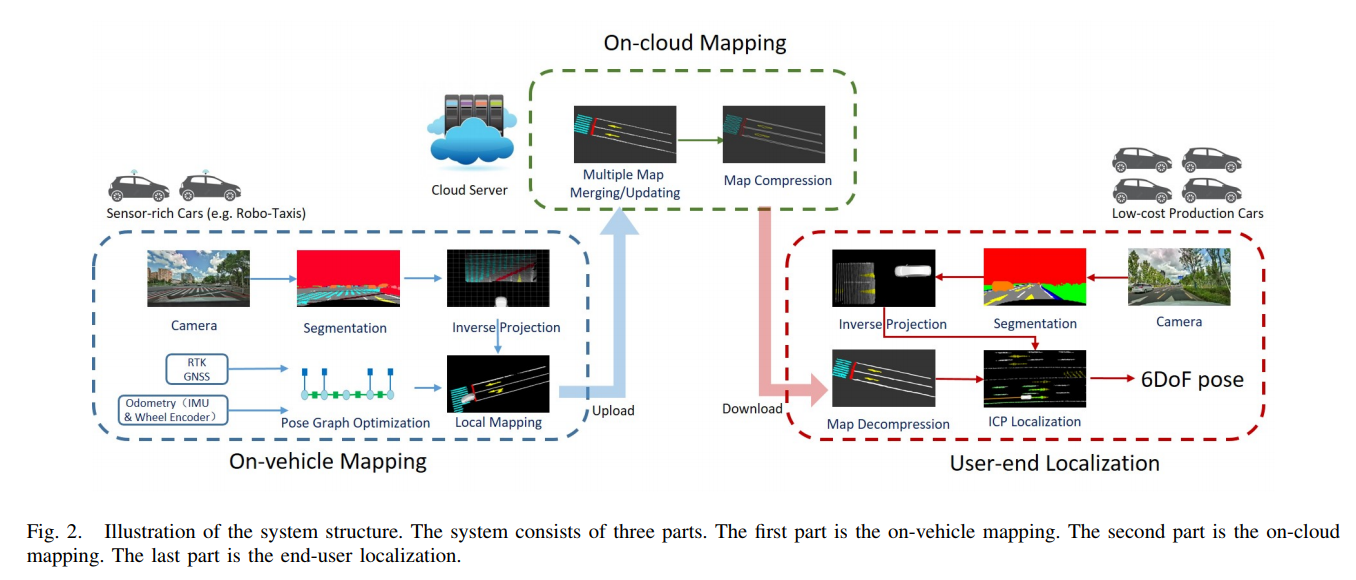
需要传感器:
- 前视相机,
- RTK-GPS
- IMU和轮速
车端建图:
语义图是在前视提取的, 建图, 然后上传云端.
云端建图:
融合多趟建图, 然后压缩成contour extraction.
4. On-Vehicle Mapping
A. Image Segmentation
用了CNN方法, 类似[23, 24, 25]. 多累检测, 地面, lane line, stop line, road marker, curb, vehicle, bike, human.
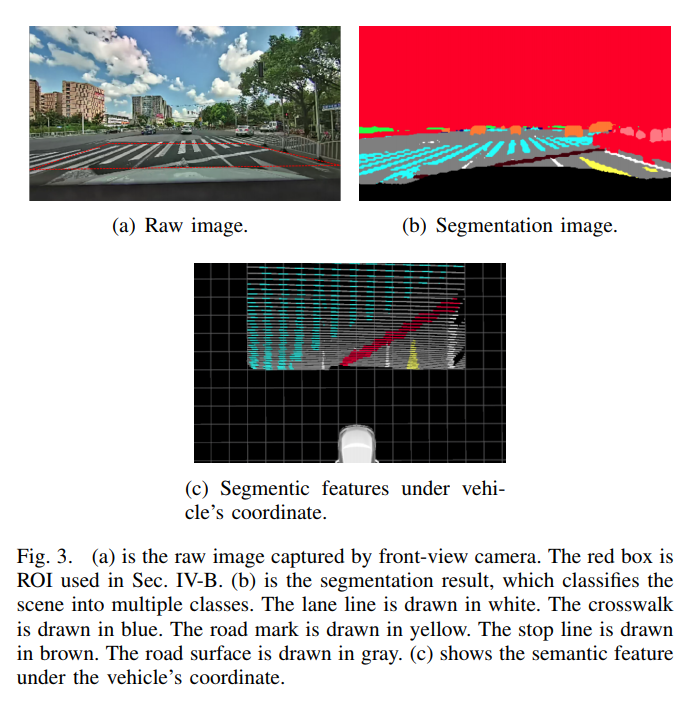
B. Inverse Perspective Transformation
因为透视的噪声, 越远的场景, 越大的误差. 我们只选择ROI, 接近相机中心的部分, 12mx8m.
假设地面是一个平面, 每个像素\([u, v]\)会被投影到地面(z=0):
\[\frac{1}{\lambda}\left[\begin{array}{c}
x^{v} \\
y^{v} \\
1
\end{array}\right]=\left[\mathbf{R}_{c} \mathbf{t}_{c}\right]_{\text {col }: 1,2,4}^{-1} \pi_{c}^{-1}\left(\left[\begin{array}{l}
u \\
v \\
1
\end{array}\right]\right)
\]
这里 \(\pi_c(.)^{-1}\)是反投影. R, t外参. 只用1, 2, 4因为z=0.
C. Pose Graph Optimization
及时用了RTK-GNSS, 也不能保证位姿是一直可靠的, 因为它只能在空旷区域提供厘米级别的位置.

用pose graph来align里程计和GNSS.

\[\min _{\mathbf{s}_{0} \ldots \mathbf{s}_{n}}\left\{\sum_{i \in[1, n]}\left\|\mathbf{r}_{o}\left(\mathbf{s}_{i-1}, \mathbf{s}_{i}, \hat{\mathbf{m}}_{i-1, i}^{o}\right)\right\|_{\boldsymbol{\sigma}}^{2}+\sum_{i \in \mathcal{G}}\left\|\mathbf{r}_{g}\left(\mathbf{s}_{\mathbf{i}}, \hat{\mathbf{m}}_{i}^{g}\right)\right\|_{\boldsymbol{\sigma}}^{2}\right\}
\]
D. Local Mapping
地图分成 \(0.1\times 0.1 \times 0.1m\) 的grid, 包含位置, 语义信息, 记录语义counter.

5. On-Cloud Mapping
A. Map Merging / Updating
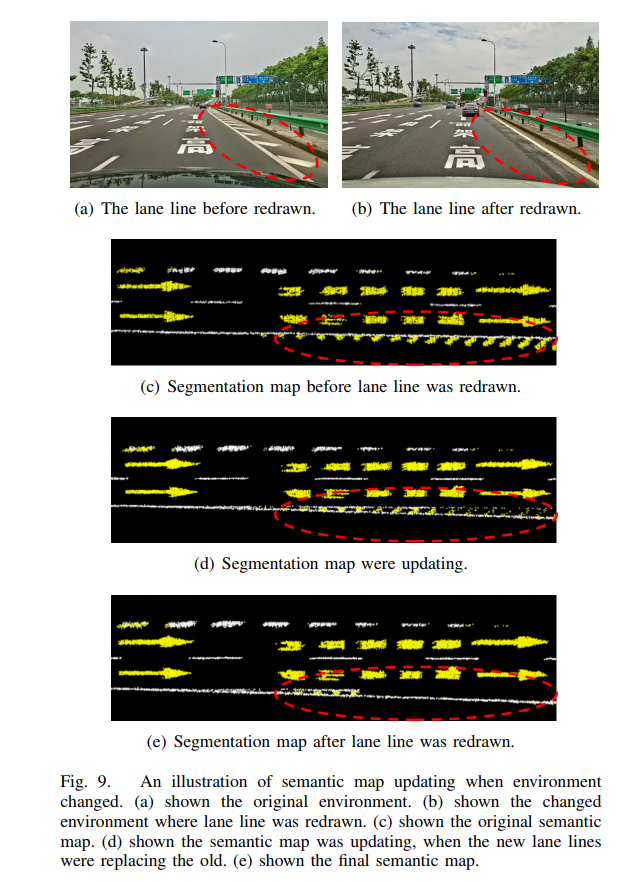
根据位置, local map会被加入到grid map里. 详见上图.
B. Map Compression

6. User-End Localization
A. Map Decompression
恢复稠密点云.
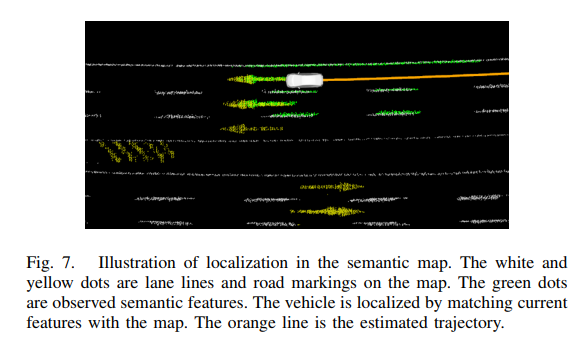
B. ICP Localization
\[\mathbf{q}^{*}, \mathbf{p}^{*}=\underset{\mathbf{q}, \mathbf{p}}{\arg \min } \sum_{k \in \mathcal{S}}\left\|\mathbf{R}(\mathbf{q})\left[\begin{array}{c}
x_{k}^{v} \\
y_{k}^{v} \\
0
\end{array}\right]+\mathbf{p}-\left[\begin{array}{c}
x_{k}^{w} \\
y_{k}^{w} \\
z_{k}^{w}
\end{array}\right]\right\|^{2}
\]
7. Experimental Results
A. Map Production
需要RTK-GPS, 前视相机, IMU和轮速编码器.
路算的总长是 22km, raw semantic map是16.7MB, 压缩的是0.786MB, 平均大小是36KB/KM.
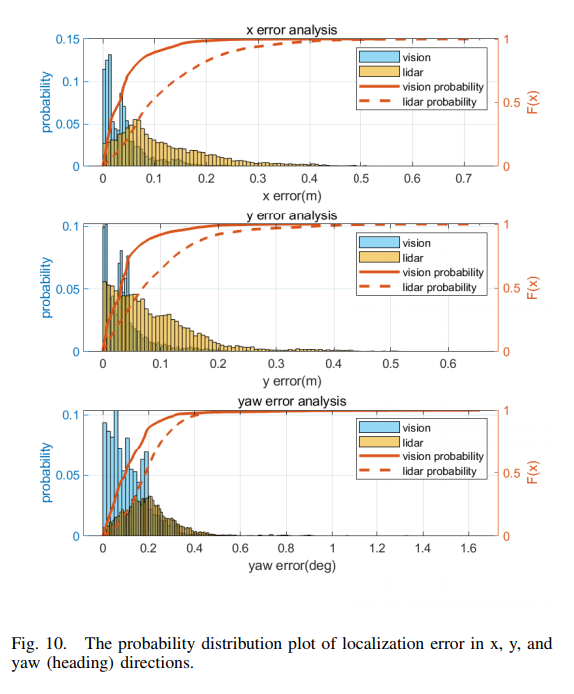
B. Localization Accuracy
我们用Lidar的方法来评测. 对于自动驾驶任务, 我们专注在x, y, yaw的精度.

8. Conclusion & Future Work
没啥.

 浙公网安备 33010602011771号
浙公网安备 33010602011771号