

Abstract
在这个文章里, 我们细致的比较了10种不同的3D LiDAR传感器, 用了一般的 Normal Distributions Transform (NDT) 算法.
我们按以下几个任务来分析表现和特性:
- 按照 mean map entropy 来衡量地图质量
- 6DOF 定位
1. Introduction
Operational design domain: ODD
有几个关键的指标:
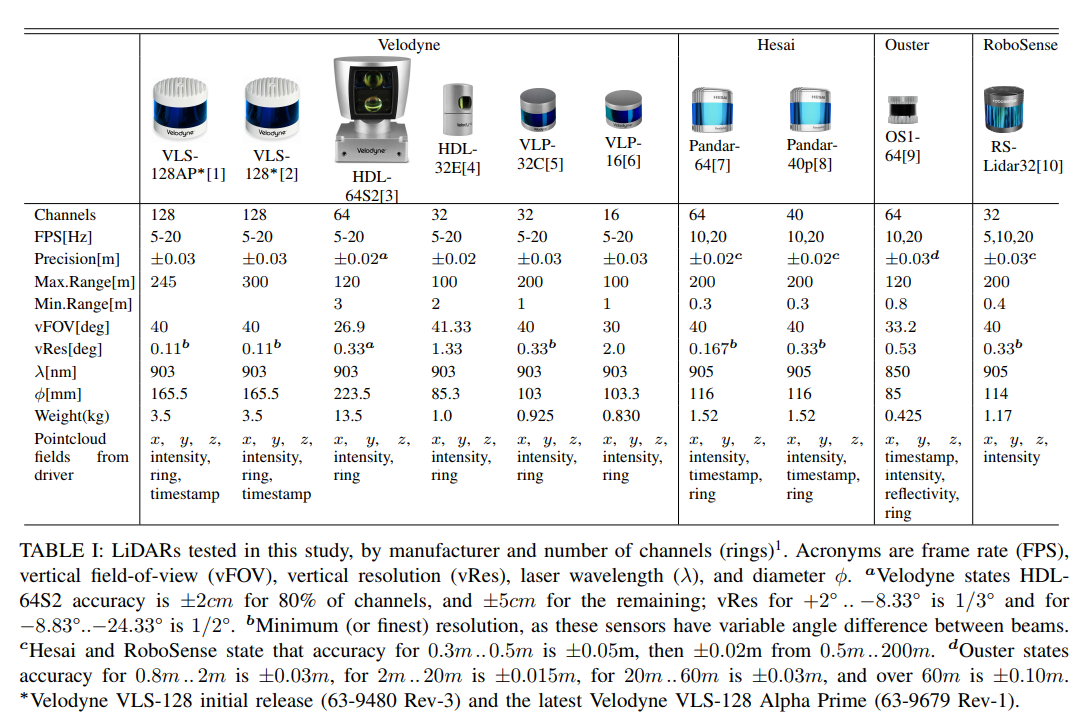
- 测量范围
- 测量精度
- 重复性? repeatablity
- point density
- scanning speed
- configurability
- wavelengths
- robustness对于环境变化, 不同的天气
我们用 NDT[16, 17, 18].
贡献如下:
- ..
- 3D地图的评估, 用了 mean map entropy (MME) 和 mean plane variance (MPV) 分数.
2. Normal Distributions Transform
A. NDT Scan Matching
在NDT里, scan (点云) 会被分为 归一的3D格中, 每个体素保留它的 平均和分布, 然后用 正态分布体素来表达正太分布.
按照[16] 的说法, 点云(地图或者是model) $\bold{M} 是 $$M$ 个点 \(x_i = <x_i, y_i, z_i>^T\) 的向量, \(i \in [1...M]\), \(x_k\) 是第k个 ND 体素.
\(t\) 的定义是6DoF的位姿.
当 \(E(X, t)\) 大的时候, 表示输入的点云和地图align的很好. 牛顿非线性函数优化会用于找到 \(t\) 使得 \(E(X, t)\) 最大化. 因此我们最小化函数 \(f(t) = -E(X, t)\). 参数向量 \(t\) 的更新如下:
这里 \(g\) 和 \(H\) 是 f 的偏微分 和 二阶偏微分.
B. NDT Evaluation Metrics
- 迭代:
- Fitness Score
- Transformation Probability
C. NDT Precision and Performance Factors
- 输入点云降采样:
- 参照地图的分辨率:
- VoxelGrid Filter: 跟地图分辨率类似, voxel grid filter 是降采样的方法
- LiDAR Beams 的数量:
- Matching Initialization
3. Multiple LiDAR Dynamic Traffic Data
A. 数据采集
- 三个时间段: 早中晚
B. Evaluation Routes
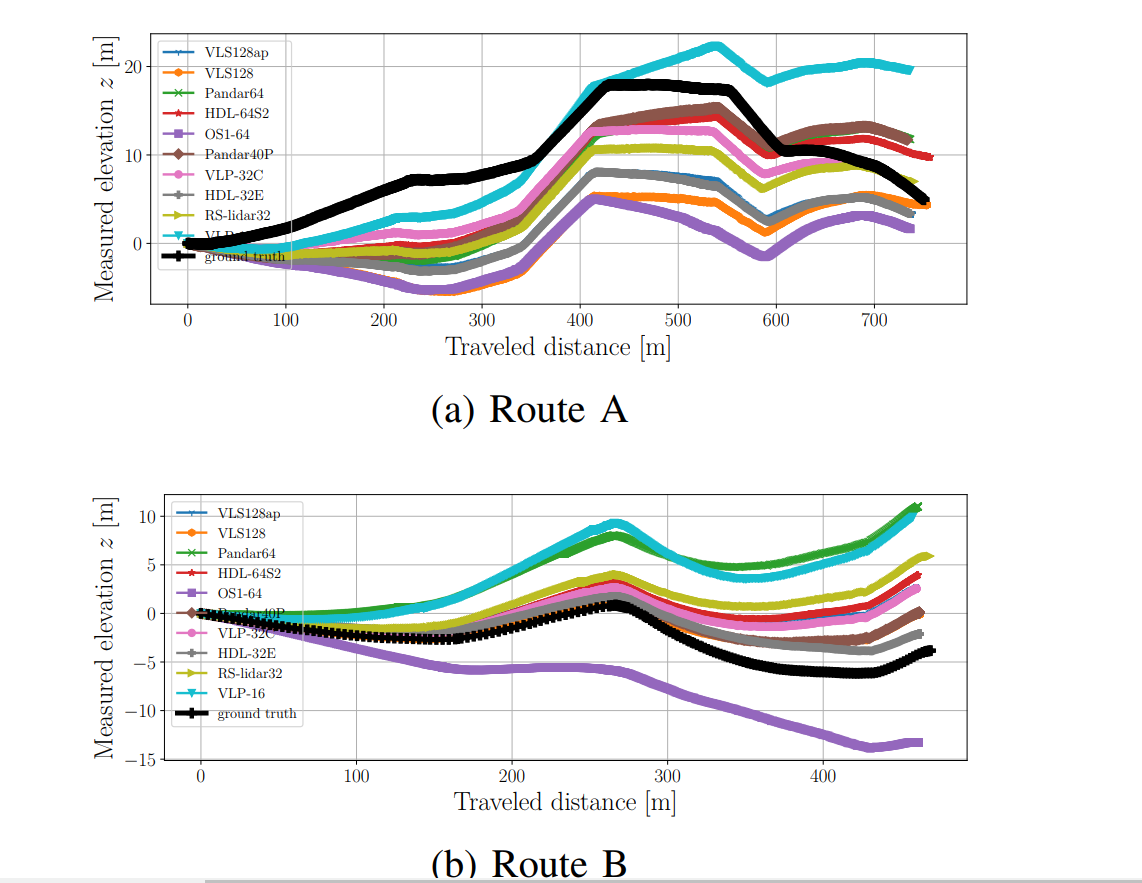
- 路线 A: 749m, 比较吓着, 有树, 建筑, 坡道; 最大速度在 30km/h
- 路线 B: 475m, 基本平, 最大速度在 40km/h - 50km/h
- 路线 C: 797m, 最大速度40km/h

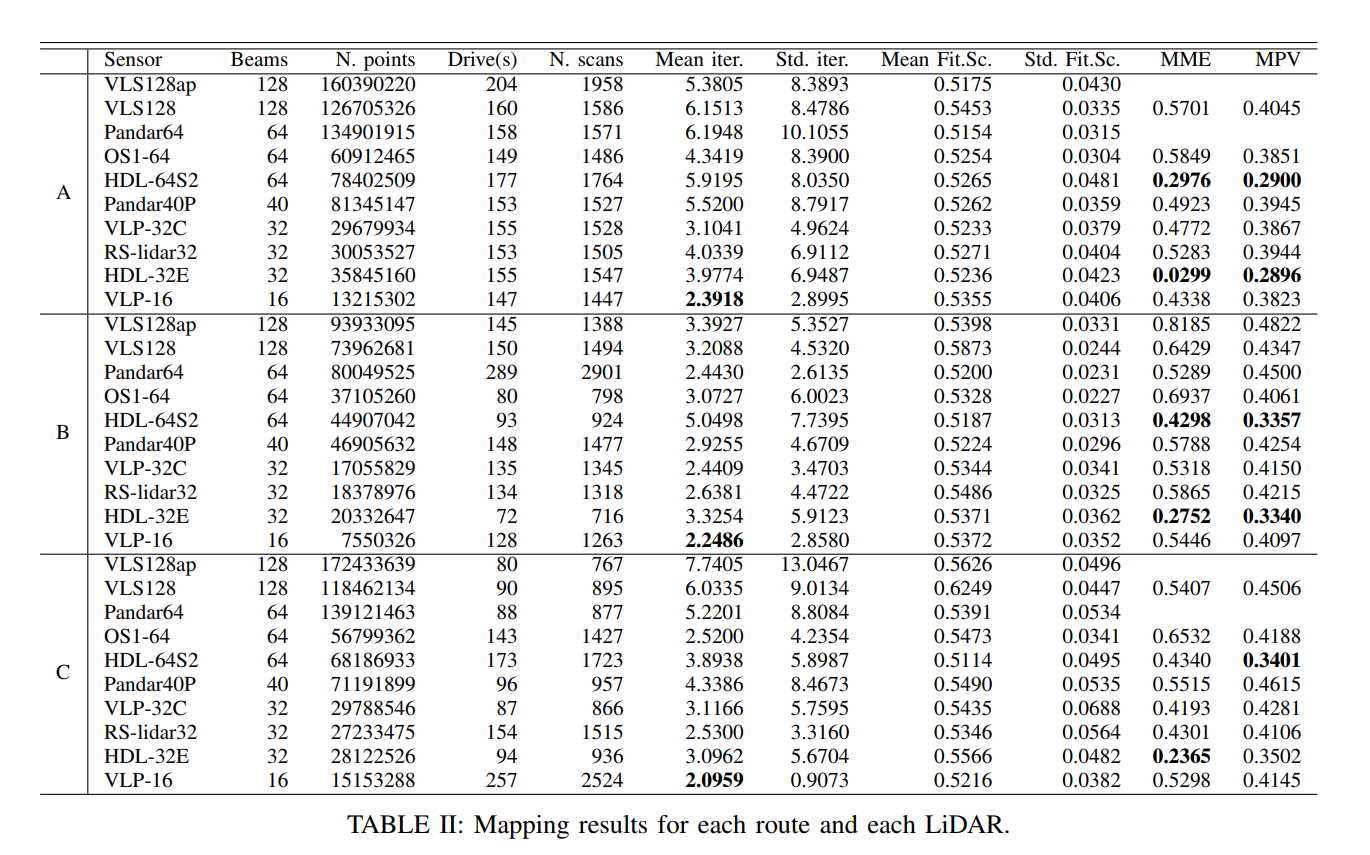
4. Mapping Evaluation
对于每个LiDAR和每条路线, 我们创造了一个3D地图. NDT的分辨率的定义是 1m, 最大迭代数量是50次, 最小范围是 3m, 最大范围是 200m. 最小shift 参数被设定为 1m.
VLP-16 有最低线束 和 OS1-64 有最大的纵向误差.
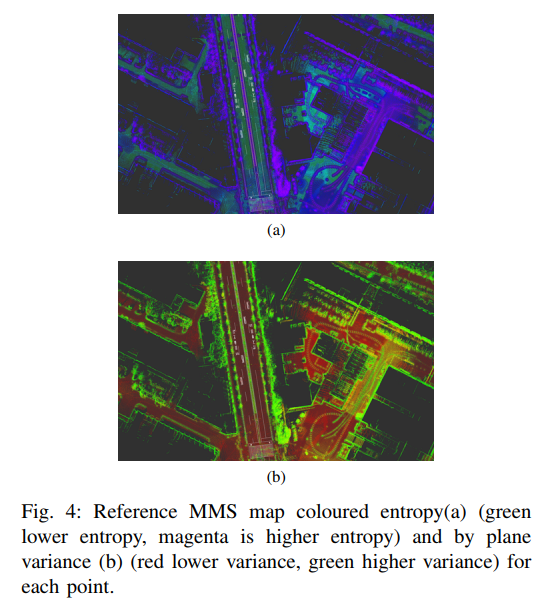
我们也考虑了别的维度来衡量地图质量, 平均地图熵 (mean map entropy MME) 和 mean plane variance (MPV) 在[25]中被讨论过. Mean map entropy 如下:
Mean plane variance (MPV) 分数如下:
5. Localization Evaluation
我们用了 体素大小是2m, 最大距离是200m.
跟NDT建图类似, NDT 分辨率是1m, 最大迭代数是50, 误差阈值是1m. 图5展示了不同LiDAR定位时的表现.

6. Conclusion
没啥

 浙公网安备 33010602011771号
浙公网安备 33010602011771号