[开源项目]蓝点无限TWR算法-多基站多标签固件
初衷:
随着UWB大力发展,国内实际应用逐步落地。 对于UWB的需求已经不是停留在实验测试阶段,
目前逐步进入商用大环境,很多厂商特殊需要一定要选用TWR,无法接收TDOA。
但是受限于目前大部分TWR方案一般只能支持3-4基站定位,很多厂商无法实现UWB项目快速落地。
基于以上,我们打算开源一套多基站多标签固件,方便高需求客户见解和二次开发。
同时,对于学习测试的客户,建议依然使用基本版本3-4基站定位,这种多基站多标签实现增加了更多逻辑部分的实现,不适合入门学习。
软件流程:
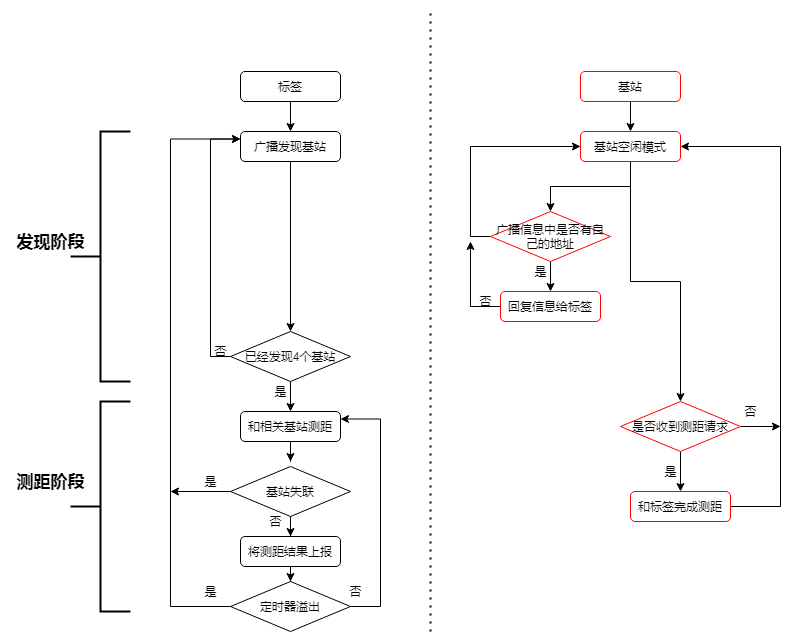
关键流程说明:
除了完成基本测距以外,这里主要需要完成动态识别功能,标签需要动态识别它周围的基站,时刻可以保持与周围3-4个基站进行测距。
固件Base:
这个固件依然基于我们的开源框架项目51uwb_base进行二次开发,
更多开源框架相关参见链接:http://51uwb.cn/forum.php?mod=viewthread&tid=165&extra=page%3D1
固件匹配Python开源上位机:
上位机使用我们目前已经开源的纯python版本上位机,相关链接:http://51uwb.cn/forum.php?mod=viewthread&tid=401&extra=page%3D1
固件重要问题说明:
1 串口输出,不同以往,这里用的是标签串口
2 上位机接口目前是TCP,需要使用串口转TCP工具:串口转TCP参见视频https://www.bilibili.com/video/BV1rv411p7Hj/
固件源码:
固件源码已经放到git上,V1.0 版本开发完成,请详细看下面的描述
https://tuzhuke@bitbucket.org/tuzhuke/bp30_multianthor.git
固件开发记录
Day1:
githash:a387f5cdbbff3b6b1c818eaf459b4ad2a6fe24c0
主要完成功能,标签发送广播信号,基站接收广播信号。标签发送的广播信号需要包含已经识别的基站地址。
Step1 在标签中定义一个存放基站的结构体数组
struct Anthor_Information
{
uint16 short_address;//基站16bit 短地址
uint16 distance;//距离信息,高8 低8bit
uint32 last_time;//上次通信时间
uint8 rssi_info;//上次通信RSSI值记录
unsigned char alive; //是否已经识别或者是否已经丢失
} anthor_info[MAX_ANTHORStep2 在标签中发送广播信号,广播信号包含了已经识别的基站,如果基站收到这个信息,发现数据包中已经有自己地址就无需反馈,否则反馈信息给标签。函数试下如下:
点击查看代码
/*******************************************************************************
* 函数名 : BPhero_TAG_Broadcast
* 描述 : 标签启动发送广播信息给各个基站,信息数据包包括了基站短地址
* 输入 : 无
* 输出 : 无
* 返回值 : 无
* 说明 : 发送broadcast信息(B信息)给所有基站
*******************************************************************************/
void BPhero_TAG_Broadcast(void)
{
uint8 index = 0 ;
uint8 strlen = 0;
msg_f_send.destAddr[0] = 0xFF;
msg_f_send.destAddr[1] = 0xFF;
msg_f_send.seqNum = distance_seqnum;
msg_f_send.messageData[0]='B';//broadcast message
strlen = strlen + 1;
uint8 *pAnthor_Str = &msg_f_send.messageData[1];
//后面跟基站信息
for(index = 0 ; index < MAX_ANTHOR; index++)
{
if(anthor_info[index].alive == 1)
{
sprintf(pAnthor_Str, "%04X:",anthor_info[index].short_address);
pAnthor_Str = pAnthor_Str + 5;
strlen = strlen + 5;
}
}
//GPIOB.5设定,兼容之前带PA的模块-->如需求请联系www.51uwb.cn
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_5, !GPIO_PIN_RESET);//PA node ,enable pa
//写入数据
dwt_writetxdata(11 + strlen,(uint8 *)&msg_f_send, 0) ; // write the frame data
dwt_writetxfctrl(11 + strlen, 0);
dwt_starttx(DWT_START_TX_IMMEDIATE); //启动发送
while (!(dwt_read32bitreg(SYS_STATUS_ID) & SYS_STATUS_TXFRS)) //等待发送完成
{ };
dwt_write32bitreg(SYS_STATUS_ID, SYS_STATUS_TXFRS);//清除发送完成标志
poll_tx_ts = get_tx_timestamp_u64();//读取发送时间戳
//清空接收缓存,待收到数据时使用
for (int i = 0 ; i < FRAME_LEN_MAX; i++ )
{
rx_buffer[i] = '\0';
}
dwt_enableframefilter(DWT_FF_DATA_EN); //启动帧过滤功能
dwt_setrxtimeout(RESP_RX_TIMEOUT_UUS*10);//设定接收延时函数
dwt_rxenable(0);//启动接收机
//sequence控制
if(++distance_seqnum == 255)
distance_seqnum = 0;
}Step3 在标签中调用上述函数广播发送,我们使用之前代码定时器回调函数,通过回调函数,可以周期性发送
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if (htim->Instance == htim3.Instance)
{
HAL_TIM_Base_Stop(&htim3);
{
dwt_forcetrxoff();
TAG_SendOut_Messge();
BPhero_TAG_Broadcast();
}
HAL_TIM_Base_Start(&htim3);
}
}Step4: 在基站接收broadcast “B”信号,在rx_main.c中收到“B信号”后打印一串字符。
case 'B':
printf("receive B message\n");
break;分别编译标签和基站的进行测试。串口数据如下图,表明数据可以正常收到。
Day2:
githash: e23e4e1e3bf681d1125036e5dbbf5a07fe363fdc
主要完成基站收到B信息后,以R信息回复给标签,标签收到信息提取短地址,并更新自己的结构体数组
Step1 修改标签广播格式,在数据包中增加已知基站的个数。
//后面跟基站信息
for(index = 0 ; index < MAX_ANTHOR; index++)
{
if(anthor_info[index].alive == 1)
{
sprintf(pAnthor_Str, "%04X:",anthor_info[index].short_address);
pAnthor_Str = pAnthor_Str + 5;
strlen = strlen + 5;
anthor_count++;
}
}
msg_f_send.messageData[1] = anthor_count;Step2: 修改基站接收处理,目前只简单反馈信息给标签,以“R”信息回复到标签,同时将标签数据包中的“现有基站个数”打印出来用于debug
case 'B':
printf("receive B anthor = %d\n",msg_f->messageData[1]);
{
msg_f_send.messageData[0]='R';//Poll message
//后面修改这个数据长度
dwt_writetxdata(11 + 1, (uint8 *)&msg_f_send, 0) ; // write the frame data
dwt_writetxfctrl(11 + 1, 0);
dwt_starttx(DWT_START_TX_IMMEDIATE);
while (!(dwt_read32bitreg(SYS_STATUS_ID) & SYS_STATUS_TXFRS))
{ };
}
break;Step3: 标签收到信息,提取基站信息中的地址
case 'R':
address = msg_f_recv->sourceAddr[1]<<8|msg_f_recv->sourceAddr[0];
printf("receive R message 0x%04X\n",address);
Update_Anthor_Info(address);
break; uint8 Update_Anthor_Info(uint32 shortaddress)
{
uint8 index = 0;
printf("shortaddress = 0x%04X\n",shortaddress);
//后面跟基站信息
for(index = 0 ; index < MAX_ANTHOR; index++)
{
if(anthor_info[index].alive == 0)
{
anthor_info[index].short_address = shortaddress;
anthor_info[index].alive = 1;
return 1;
}
}
return 0;
}Day3:
githash:4d1b64584706426c2a71174d7026cbe7696f2a4b
今天完成了基本功能开发,可以作为V1.0版本。
主要开发内容:基站解析标签发送的广播B信号,标签汇总R信号基站,如果收到R基站大于等于4个开始测距,如果测距的时候发现基站丢失,重新启动广播B信号。
1 基站解析标签广播B信号,匹配是否有自己的地址,有地址忽略,没有地址回复R信号
点击查看代码
case 'B':
printf("receive B anthor = %d\n",msg_f->messageData[1]);
Num_Anthor = msg_f->messageData[1];
Sourceaddress = msg_f->sourceAddr[1]<<8| msg_f->sourceAddr[0];
pAnthor_Str = &msg_f->messageData[2];
match_flag = 0;
for (Index = 0; Index < Num_Anthor; Index++)
{
printf("receive address = %04X\n",(pAnthor_Str[1]<<8|pAnthor_Str[0]));
if(SHORT_ADDR == (pAnthor_Str[1]<<8|pAnthor_Str[0])) //匹配成功
{
printf("match\n");
match_flag = 1;
}
pAnthor_Str = pAnthor_Str +3 ;
}
if(match_flag == 0)//没有匹配到,发送一个反馈信息
{
msg_f_send.messageData[0]='R';//Poll message
//后面修改这个数据长度
dwt_writetxdata(11 + 1, (uint8 *)&msg_f_send, 0) ; // write the frame data
dwt_writetxfctrl(11 + 1, 0);
dwt_starttx(DWT_START_TX_IMMEDIATE);
while (!(dwt_read32bitreg(SYS_STATUS_ID) & SYS_STATUS_TXFRS))
{ };
}
break;2 标签汇总基站反馈的R信号,其实这部分代码在day2 已经完成,无需修改。
3 判断收到R信号个数,这个在定时广播里判断的。如果小于4,持续执行广播收集。
HAL_TIM_Base_Stop(&htim3);
{
dwt_forcetrxoff();
if(Count_Anthor() < 4)
{
gProcess_Dis = 0;
BPhero_TAG_Broadcast();
gSend_index = 0;
}具体实现函数
uint8 Count_Anthor()
{
uint8 index = 0;
uint8 count = 0;
//后面跟基站信息
for(index = 0 ; index < MAX_ANTHOR; index++)
{
if(anthor_info[index].alive == 1)
{
count++;
}
}
return count;
}3 当R信号基站数量等于4个,开始启动测距
点击查看代码
if(Count_Anthor() < 4)
{
gProcess_Dis = 0;
BPhero_TAG_Broadcast();
gSend_index = 0;
}
else
{
if(gSend_index ==Count_Anthor())
{
gSend_index= 0;
Send_Dis_To_Anthor0();
} else
{
gProcess_Dis = 1;
BPhero_Distance_Measure_Specail_ANTHOR();// 从1 2 3 4发送
}
}这里的Send_Dis_To_Anthor0()是沿用之前的函数名,其实在这个里面实现了数据格式组装并在串口打印,以及调用函数在液晶显示。
BPhero_Distance_Measure_Specail_ANTHOR()主要功能就是启动测距,测距对象是收集到R信号的基站。
点击查看代码
void BPhero_Distance_Measure_Specail_ANTHOR(void)
{
uint16 destaddress = Find_Address();
// printf("Send Index = %d, Address = 0x%04X\n",gSend_index,destaddress);
msg_f_send.destAddr[0] =(destaddress) &0xFF;
msg_f_send.destAddr[1] = ((destaddress)>>8) &0xFF;
msg_f_send.seqNum = distance_seqnum;
msg_f_send.messageData[0]='P';//Poll message
//GPIOB.5设定,兼容之前带PA的模块-->如需求请联系www.51uwb.cn
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_5, !GPIO_PIN_RESET);//PA node ,enable pa
//写入数据
dwt_writetxdata(12,(uint8 *)&msg_f_send, 0) ; // write the frame data
dwt_writetxfctrl(12, 0);
dwt_starttx(DWT_START_TX_IMMEDIATE); //启动发送
while (!(dwt_read32bitreg(SYS_STATUS_ID) & SYS_STATUS_TXFRS)) //等待发送完成
{ };
dwt_write32bitreg(SYS_STATUS_ID, SYS_STATUS_TXFRS);//清除发送完成标志
poll_tx_ts = get_tx_timestamp_u64();//读取发送时间戳
//清空接收缓存,待收到数据时使用
for (int i = 0 ; i < FRAME_LEN_MAX; i++ )
{
rx_buffer[i] = '\0';
}
dwt_enableframefilter(DWT_FF_DATA_EN); //启动帧过滤功能
dwt_setrxtimeout(RESP_RX_TIMEOUT_UUS);//设定接收延时函数
dwt_rxenable(0);//启动接收机
//sequence控制
if(++distance_seqnum == 255)
distance_seqnum = 0;
}4 中断回调函数中处理timeout,如果测距对象基站没有反馈,标签发生timeout中断,则立即将该基站islive 设置为0,带下次统计,发现基站数量小于4,则标签重新发送广播信号收集基站
else
{
if(gProcess_Dis == 1)
{
printf("timeout address 0x%04X\n",Find_Address());
Delete_Anthor(Find_Address());
}其它更新:
git hash:4892896b3d09e6009dfbe3d537e866f2c94d2d36
修改了一个祖传代码bug,使用了野指针....
git hash:d2e01e118126c9ce9c84337126db3e92d23ed3ba
修改了UWB中断,让UWB中断只处理接收成功和timeout两种事件,其他事件均不处理
同时,调试的时候发现上位机当收到异常数据无法处理,导致异常退出
def twr_main(input_string):
print(input_string)
error_flag, result_dic = Process_String_Before_Udp(input_string)
if error_flag == 0:
[location_result, location_seq, location_addr, location_x, location_y] = Compute_Location(result_dic)
return location_result, location_seq, location_addr, location_x, location_y
return 0, 0, 0, 0, 0
当发生异常,增加return 0, 0, 0, 0, 0,代码同步更新到上位机部分链接。
自此,通过三天,零散的时间,开发出一套可以动态识别基站并完成测距的固件代码,代码编写时间和测试debug时间基本是1:5,更多的是细节考虑步骤导致异常.
开发过程中遇到一个很诡异的异常,当其中一个基站地址将短地址设置为0x0006后,标签识别成功但是无法完成测距,通过加debug信息最终发现是由于标签测距完成后有一个滤波器,滤波器设置的最大基站数目为5,导致数组越界访问。
三天零散的开发时间,可以说这次开发非常顺利,一是由于有一个比较完备的代码框架,基于之前的代码框架开发,可以减少对于底层的依赖,只需要实现逻辑部分即可。而逻辑部分其实在很早之前就有想法,通过想法落实到流程图,规划每一步要做什么。目前的代码还没有切合到流程图上,流程图中,我的想法是即便有4个基站可以定位,依然周期性的发送广播,发现更多的基站,选取附近的基站做参考。 由于时间关系,这个部分可能留给各位看官了。
关于硬件,目前我们的代码,基于硬件是我们自研的BP30,使用主控是F4。同时可以无缝在BP400 上使用。 如果没有我们的硬件,可以适当进行移植,匹配主控。
最后,欢迎交流分享!

 浙公网安备 33010602011771号
浙公网安备 33010602011771号