
摘要: 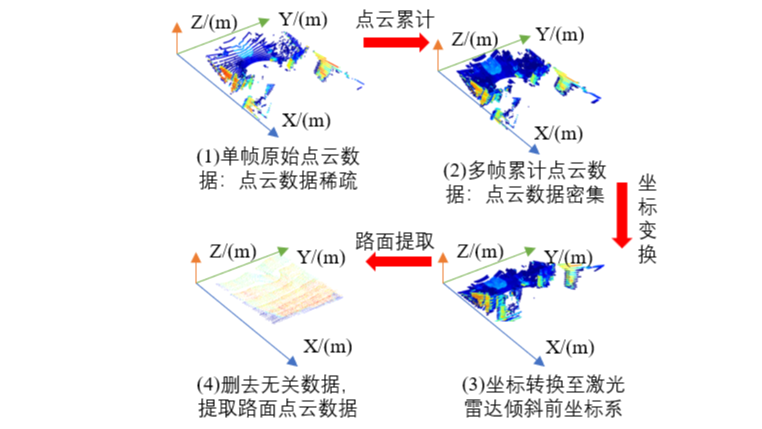 主要流程介绍:由于单帧点云数据稀疏,通过点云累计方法,可将多帧点云数据配准为一帧;由于在本次实验时将激光雷达倾斜安装,激光雷达坐标系发生变化,为将其转换至倾斜前坐标,需进行坐标系的转换;最后将感兴趣区域内数据进行提取。 点云累计 原始pcap点云数据: 本次实验读取文件为VLP-16激光雷达采集的p 阅读全文
主要流程介绍:由于单帧点云数据稀疏,通过点云累计方法,可将多帧点云数据配准为一帧;由于在本次实验时将激光雷达倾斜安装,激光雷达坐标系发生变化,为将其转换至倾斜前坐标,需进行坐标系的转换;最后将感兴趣区域内数据进行提取。 点云累计 原始pcap点云数据: 本次实验读取文件为VLP-16激光雷达采集的p 阅读全文
主要流程介绍:由于单帧点云数据稀疏,通过点云累计方法,可将多帧点云数据配准为一帧;由于在本次实验时将激光雷达倾斜安装,激光雷达坐标系发生变化,为将其转换至倾斜前坐标,需进行坐标系的转换;最后将感兴趣区域内数据进行提取。 点云累计 原始pcap点云数据: 本次实验读取文件为VLP-16激光雷达采集的p 阅读全文