
文献综述--路面识别(加速度、视觉、激光雷达)
- Vehicle parameter identification and road roughness estimation using vehicle responses measured in field tests(使用在现场测试中测量的车辆响应进行车辆参数识别和道路粗糙度估计)
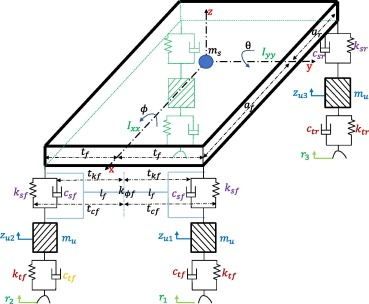
开发了一种利用现场测试中测量的车辆响应来估计车辆参数和道路粗糙度的方法。首先,引入了整车模型。然后,使用车辆经过颠簸的随之而来的自由响应来识别车辆模态参数。其次,从车辆运动方程导出车辆频率响应函数(FRF)相对于车轮接触点的表达式,并开发了一种基于车辆FRF的路面不平度估计方法。最后,进行车辆通过颠簸的现场测试以识别车辆模型
- Estimation of road surface type from brake pressure pulses of ABS(从 ABS 的制动压力脉冲估计路面类型)湿路、湿滑路面
通过根据车轮加速度和 ABS 激活时施加的制动压力脉冲之间的机器学习方法来预测路面类型。对于路面类型估计,首先在不同的速度和路况下进行ABS测试,测量制动压力和车轮加速度的变化。然后,将测量的制动压力和车轮加速度数据应用于机器学习方法。
- Estimation of tire-road peak adhesion coefficient for intelligent electric vehicles based on camera and tire dynamics information fusion(基于摄像头与轮胎动力学信息融合的智能电动汽车胎路峰值附着系数估计)
基于图像信息的道路识别
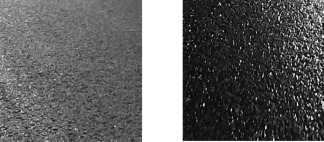
将路面分为正常干沥青路面与湿沥青路面,两种类型的区别主要体现在颜色和纹理结构上。湿沥青呈深灰色,比干沥青具有更高的质地清晰度。采用颜色矩法和灰度共生矩阵法提取道路图像的颜色特征和纹理特征。
- 道路图像颜色特征提取
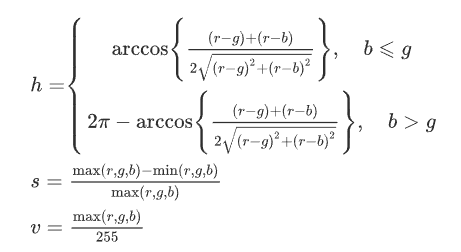
相机获取的图像的原始格式通常是RGB,表示红、绿、蓝三个颜色通道上的亮度值。 如果将原始图像中某个像素的值表示为(r,g,b),则可以通过下式将其转换为HSV颜色空间(h,s,v)(HSV的三个元素H、S和V 分别代表色相、饱和度和亮度)
考虑到特征提取的有效性和计算复杂度,采用颜色矩法提取图像的颜色特征。 图像的颜色信息主要集中在低阶矩[23]。因此使用图像的一阶、二阶和三阶矩来提取颜色特征,计算公式如下
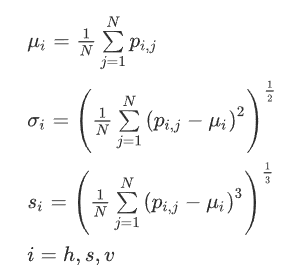
其中,\(p_{i,j}\)是通道\(i\)处第\(j\)个像素的值;\(N\)是图像中的像素数;\(u_i\),\(s_i\)和\(\sigma_i\)分别是图像在\(i\)通道的一阶、二阶和三阶色矩,对于一张道路图像,三个通道的前三阶颜色矩可以描述为一个 9 维颜色特征向量

- 道路图像纹理特征提取
图像的纹理特征对应于物体表面或结构的属性。在宏观层面上,纹理表现出图像在方向、密度和周期性方面的变化。 作为经典的纹理统计分析方法,灰度共生矩阵通过计算不同距离像素灰度值的联合条件概率密度,提取14 s阶统计量来描述纹理特征。提取由能量、熵、对比度和相关性组成的 4 维向量来描述图像纹理特征。

其中,\(ASM\)为能量值,反映了纹理的粗细,能量值大表示图像不同区域存在较大差异;\(ENT\)是图像纹理的对比度,用来描述纹理的清晰程度,纹理沟越深,\(ENT\)值越高;\(CON\)是图像纹理的相关性,反映图像灰度的水平或垂直相似度;\(COR\)是图像纹理的熵,反映了图像纹理的细腻程度,熵值大意味着图像中的纹理密集。结合上述方程可以得到一个13维的特征向量:

