摘要: 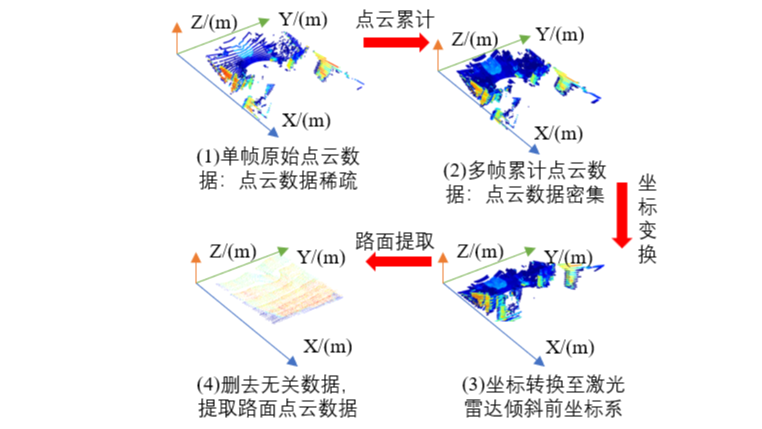 主要流程介绍:由于单帧点云数据稀疏,通过点云累计方法,可将多帧点云数据配准为一帧;由于在本次实验时将激光雷达倾斜安装,激光雷达坐标系发生变化,为将其转换至倾斜前坐标,需进行坐标系的转换;最后将感兴趣区域内数据进行提取。 点云累计 原始pcap点云数据: 本次实验读取文件为VLP-16激光雷达采集的p 阅读全文
主要流程介绍:由于单帧点云数据稀疏,通过点云累计方法,可将多帧点云数据配准为一帧;由于在本次实验时将激光雷达倾斜安装,激光雷达坐标系发生变化,为将其转换至倾斜前坐标,需进行坐标系的转换;最后将感兴趣区域内数据进行提取。 点云累计 原始pcap点云数据: 本次实验读取文件为VLP-16激光雷达采集的p 阅读全文
主要流程介绍:由于单帧点云数据稀疏,通过点云累计方法,可将多帧点云数据配准为一帧;由于在本次实验时将激光雷达倾斜安装,激光雷达坐标系发生变化,为将其转换至倾斜前坐标,需进行坐标系的转换;最后将感兴趣区域内数据进行提取。 点云累计 原始pcap点云数据: 本次实验读取文件为VLP-16激光雷达采集的p 阅读全文
posted @ 2023-02-09 21:27
嶽过山丘
阅读(926)
评论(0)
推荐(0)
 ==Vehicle parameter identification and road roughness estimation using vehicle responses measured in field tests==(使用在现场测试中测量的车辆响应进行车辆参数识别和道路粗糙度估计) 开发
==Vehicle parameter identification and road roughness estimation using vehicle responses measured in field tests==(使用在现场测试中测量的车辆响应进行车辆参数识别和道路粗糙度估计) 开发 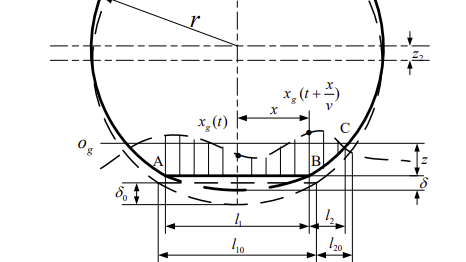 弹性路面 在师弟帮助下,查找了轮胎部分参数,对于查找不到参考数据的先进行假设 参数设定 %% 轮胎参数 pi = 0.58e6; % 额定充气压力pi pc = 79e6; % 胎体刚度pc B = 1.097; % 轮胎宽度B Wf = 52940; % 前轮满载载荷Wf Wr = 71706;
弹性路面 在师弟帮助下,查找了轮胎部分参数,对于查找不到参考数据的先进行假设 参数设定 %% 轮胎参数 pi = 0.58e6; % 额定充气压力pi pc = 79e6; % 胎体刚度pc B = 1.097; % 轮胎宽度B Wf = 52940; % 前轮满载载荷Wf Wr = 71706; 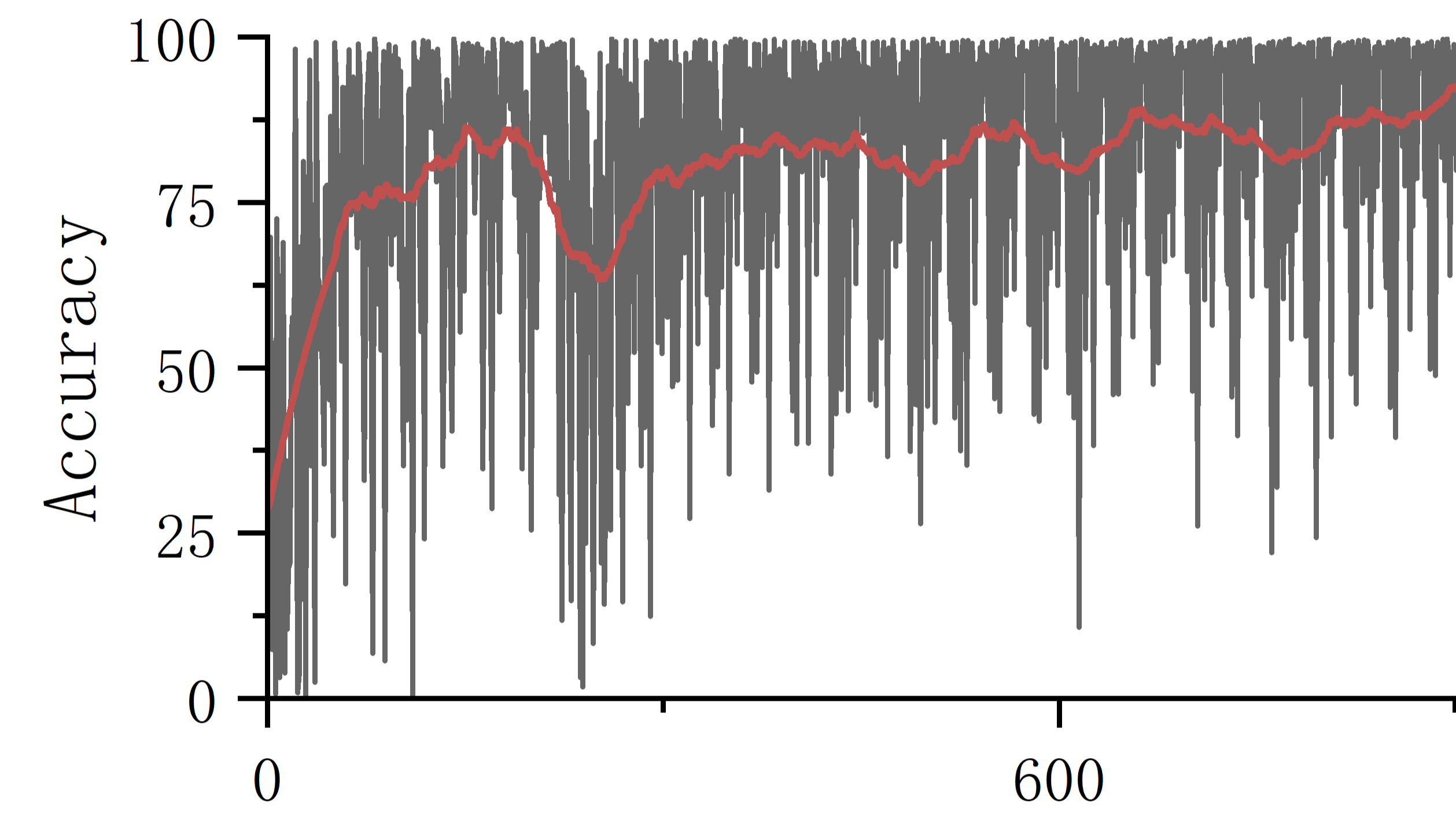 通过matlab验证基于TCN的路面等级分类 运行simulink仿真模型得到簧下质量加速度(暂未加入弹性路面) 得到的数据如图所示: 训练TCN模型 clc clear %% 加载数据 load X_train load Y_train load X_test load Y_test len=le
通过matlab验证基于TCN的路面等级分类 运行simulink仿真模型得到簧下质量加速度(暂未加入弹性路面) 得到的数据如图所示: 训练TCN模型 clc clear %% 加载数据 load X_train load Y_train load X_test load Y_test len=le 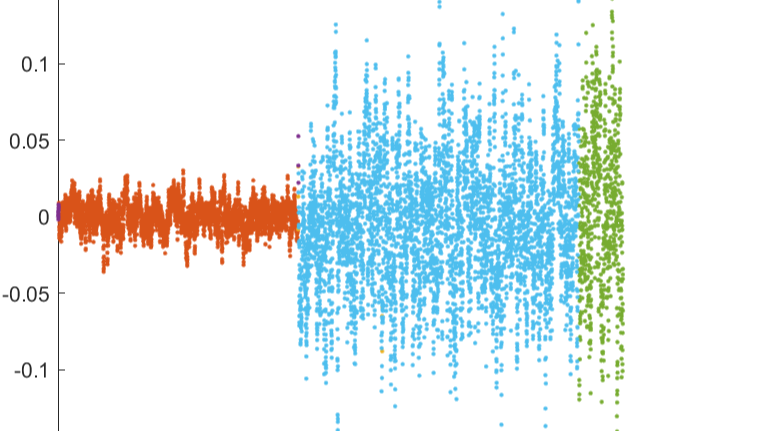 Lstm 路面等级识别 路面等级分类 一般将路面等级分为A-H8个等级,车辆在不同路面等级下的路面响应不同,如车辆垂直加速度。 建立路面模型以及车辆1/4悬架模型,得到不同路面等级下的车辆簧下质量加速度输出。 数据集制作 随机截取某一路面等级下的加速度数据,记录该数据对应的路面等级, clear c
Lstm 路面等级识别 路面等级分类 一般将路面等级分为A-H8个等级,车辆在不同路面等级下的路面响应不同,如车辆垂直加速度。 建立路面模型以及车辆1/4悬架模型,得到不同路面等级下的车辆簧下质量加速度输出。 数据集制作 随机截取某一路面等级下的加速度数据,记录该数据对应的路面等级, clear c 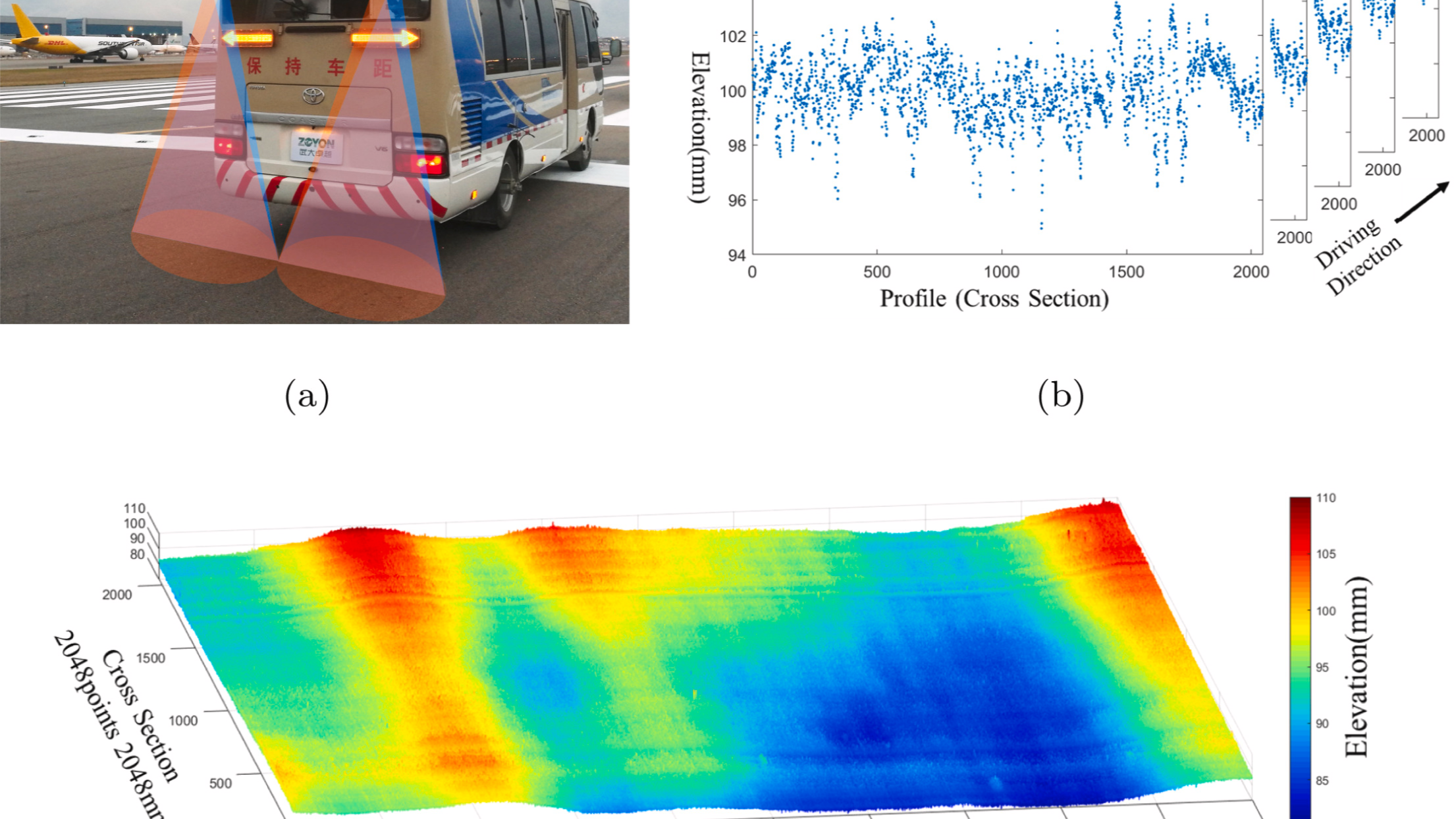 3D pavement data decomposition and texture level evaluation based on step extraction and Pavement-Transformer 主要工作 1 提出了一种高精度、高稳定性的3D路面数据分解方法 2 本文对 Tr
3D pavement data decomposition and texture level evaluation based on step extraction and Pavement-Transformer 主要工作 1 提出了一种高精度、高稳定性的3D路面数据分解方法 2 本文对 Tr  文献阅读 文献1 一. Deep learning-based dynamic object classification using LiDAR point cloud augmented by layer-based accumulation for intelligent vehicles 基
文献阅读 文献1 一. Deep learning-based dynamic object classification using LiDAR point cloud augmented by layer-based accumulation for intelligent vehicles 基 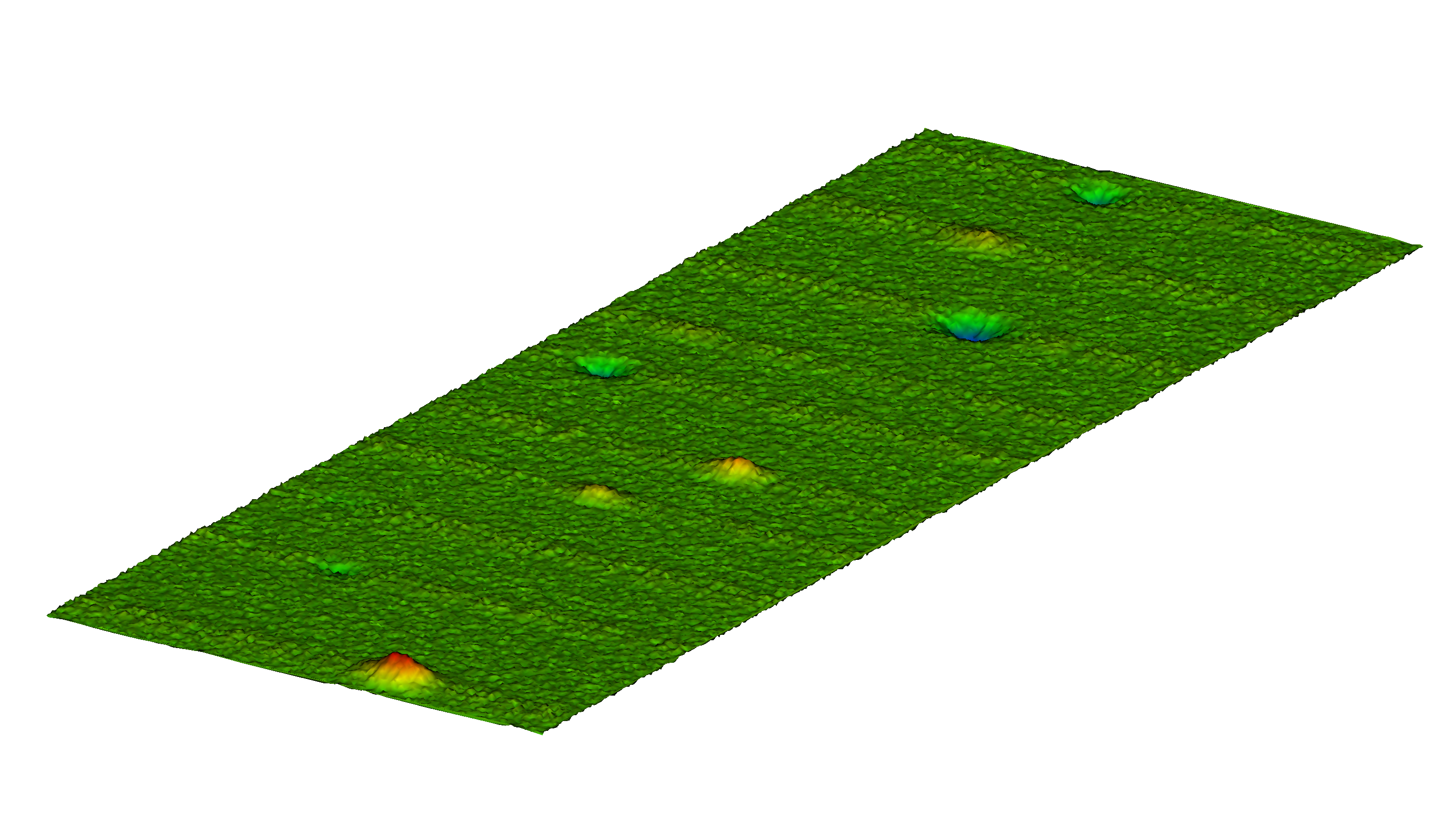 基本原理 非铺装路面点云往往十分粗糙,及时是较为平坦的路面,由于沙砾等,点云存在较多噪声,因此在仿真生成非铺装路面点云时,以随机噪声来表达路面的粗糙。 通过在点云的Z,Y方向上添加一个随机白噪声,来表示较平坦路面 rand_y{i}=0.05*rand(length(x),1); rand_z{i}
基本原理 非铺装路面点云往往十分粗糙,及时是较为平坦的路面,由于沙砾等,点云存在较多噪声,因此在仿真生成非铺装路面点云时,以随机噪声来表达路面的粗糙。 通过在点云的Z,Y方向上添加一个随机白噪声,来表示较平坦路面 rand_y{i}=0.05*rand(length(x),1); rand_z{i}  正态分布函数(高斯函数) 概率密度函数:\(f(x)=\frac{1}{\sqrt{2\cdot\pi}} \cdot e^{-{\frac{x-\mu}{2\sigma}}}\) 图像关于$x=\mu$对称 在$x=\mu$处有最大值 在$x= \mu \pm \sigma$为拐点 固定$\sig
正态分布函数(高斯函数) 概率密度函数:\(f(x)=\frac{1}{\sqrt{2\cdot\pi}} \cdot e^{-{\frac{x-\mu}{2\sigma}}}\) 图像关于$x=\mu$对称 在$x=\mu$处有最大值 在$x= \mu \pm \sigma$为拐点 固定$\sig  浙公网安备 33010602011771号
浙公网安备 33010602011771号