『笔记』秋招知识库清单
『笔记』秋招知识库清单
这里是为了把秋招总体包括的硬知识做个总览清单,从而有个high-level的感觉,而且可以不时复习的时候比对着看。注意,这里不包括属于自己的项目内容和细节,而是所有的知识
Part 1:项目相关
3D object detection
voxel-based的single-stage方法: VoxelNet,SECOND,PointPillars,CenterPoint, CBGS
point-based的two-stage方法:PointNet,PointNet++;PointRCNN,Fast Point-RCNN,Part-A^2,PV-RCNN
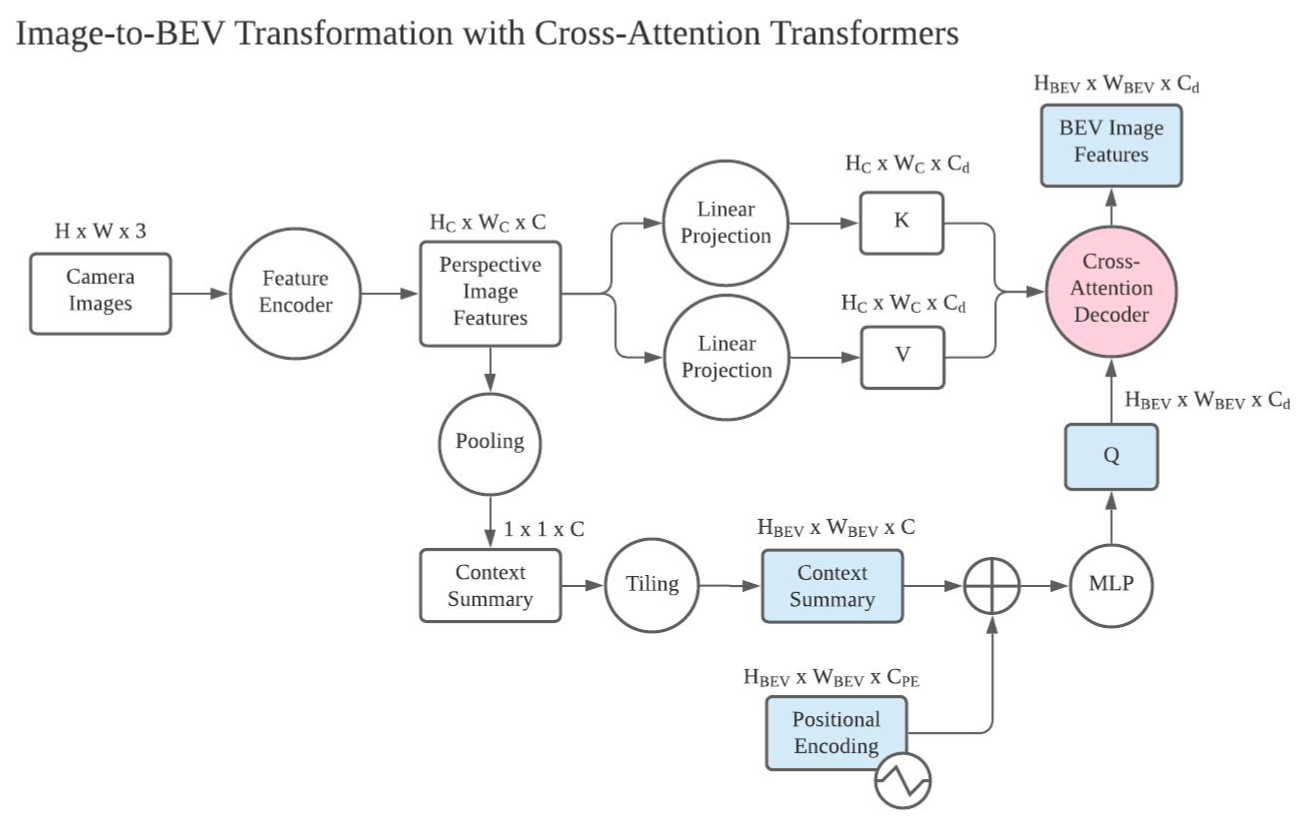
camera-only的方法:1. Directly in perspective view:FCOS3D,2. Query-based:DETR3D,PETR,PETRv2,3. Explicitly convert persepective-view to bev:LSS,OFT;BEVDet,M^2BEV,BEVDet4D;BEVFormer,CVT
- Note: use temporal cues:BEVDet4D,BEVFormer,PETRv2
point-level的fusion方法:PointPainting,PointAugmenting,FusionPainting,DeepFusion
proposal-level (camera到lidar)的fusion方法:F-PointNet
bev的fusion方法:1. 逆透视变换(Inverse Perspective Mapping,IPM):VectorMapNet (2022/06, Arxiv),2. LSS-based:(BEVDet,M^2BEV),BEVFusion-MIT,BEVFusion-PKU,BEVDepth (2022/06, Arxiv),TransFusion,3. MLP系列:VPN (RAL 2020),PON (CVPR 2020 oral),4. Transformer-based:DETR3D,CVT,Translating Images into Maps(ICRA 2022 best paper),特斯拉方案(AI Day 2021),BEVFormer
KITTI及其benchmark
NuScenes及其benchmark
关于三维目标检测的面试问题收集
2D object detection / image segmentation
YOLO series(v1/2/3, x)
R-CNN series(R-CNN/Fast R-CNN/Faster R-CNN/Mask R-CNN)
SSD,RetinaNet,FCOS
DETR
Deformable DETR
deeplabv3+:https://zhuanlan.zhihu.com/p/62261970
MoCo,SimCLR,MoCov2,BYOL,SimSiam;MAE
介绍sparse convolution的原理
LSS中的cumsum
voxelization的方式
static voxelization和dynamic voxelizaiton
目标检测相关基础知识(检测逻辑,anchor相关,mAP的计算方式等)
相机相关知识,变换矩阵,雷达和相机的外参标定
tensorrt布署网络方法,fp16和fp8
点云upsample方式(bilinear,pcn)
关于三维目标检测相关可能问的思考性问题(搜索面经和总结)
transformer基础知识
cam,grad-cam,grad-cam++:
RANSAC,高斯牛顿法
ROS知识(基础知识,action文件使用)
openpcdet + pointpillars调试记录
bevfusion + centerpoint调试记录
mmdet3d主要流程调试记录
transfusion调试记录
手写一个pytorch分类网络
手写一个resnet
手写2d iou的计算,介绍3d iou的计算逻辑
手写transformer
手写nms
手写点云voxelization
手写RANSAC
手写conv2d
手写maxpooling
Part 2:基础知识
课程知识
SC42056:introduction,linear, quadratic, nonlinear unconstrained, nonlinear contrained, convex;思维导图
RO47001:homogeneous matrix, quaternion
RO47003:linux, ROS, C++
RO47002:机器学习知识(SVM, bias/variation, PCA, SVD, boosting/bagging, ...)
RO47004:相机相关知识,KF/PF,lidar的ego-compensation
CS4240:深度学习知识
CS4245:...
其它重要知识
深度学习基础知识和面试题
pytorch基础知识和面试题
python基础知识和面试题
c++基础知识和面试题
自己的笔经和面经回顾
Part 3:算法题
所做过的题目
自己的approx. 250道题的回顾
牛客做的华为机试
在牛客做更多真题,以及搜索笔经面经
常用算法回顾
quick/heap/merge sort
背包/打家劫舍/编辑距离的dp问题
通用知识回顾
常用时间复杂度总结
c++常用函数,库名
c++ acm模式的输入方式

 浙公网安备 33010602011771号
浙公网安备 33010602011771号