
Arduino理论
项目结构
(1)setup():
Arduino控制器通电或复位后,即会开始执行setup() 函数中的程序,该部分只会执行一次。
通常我们会在setup() 函数中完成Arduino的初始化设置,如配置I/O口状态,初始化串口等操作。
(2)loop():
在setup() 函数中的程序执行完后,Arduino会接着执行loop() 函数中的程序。而loop()函数是一个死循环,其中的程序会不断的重复运行。通常我们会在loop() 函数中完成程序的主要功能,如驱动各种模块,采集数据等。
输入和输出
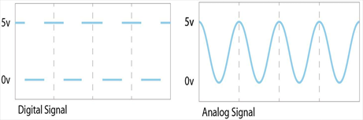
(1)数字信号与模拟信号的区别
(2) 区分电路板子中的“数字”与“模拟”接口
板子上会印有“D”或者“A”的字样:
“D”代表“数字”
“A”代表“模拟”
数字口输入输出函数
(1)pinMode(pin, mode):
Arduino控制器在使用输入或输出功能前,你需要先通过pinMode() 函数配置引脚的模式为输入模式或输出模式。
函数参数
参数pin为指定配置的引脚编号:0~13
参数mode为指定的配置模式:
INPUT 输入模式
OUTPUT 输出模式
INPUT_PULLUP 输入上拉模式
(2) digitalWrite(pin, value):
Arduino控制器使用到了pinMode(),引脚配置为输出模式。
配置成输出模式后,还需要使用digitalWrite() 让其输出高电平或者是低电平
函数参数
参数pin为指定输出的引脚编号(0~13);
参数value为你要指定输出的电平
使用HIGH指定输出高电平,或是使用LOW指定输出低电平
(3)digitalRead(pin):
Arduino控制器使用到了pinMode(),引脚配置为输入模式。
配置成输入模式后,还需要使用digitalRead() 读取端口状态
函数参数
参数pin为指定输出的引脚编号;
参数返回值为获取到的信号状态,1为高电平,0为低电平
延时函数
(1) delay( ms):
Arduino提供了毫秒级和微秒级两种延时函数。运行延时函数时,会等待指定的时间,再运行此后的程序。你可以通过参数设定延时时间。
此函数为毫秒级延时。
参数为时长,类型unsigned long。
(2) delayMicroseconds( us ):
此函数为毫秒级延时。
参数为时长,类型unsigned long。
注: Arduino Uno上的延时操作精度为+-0.5 微秒
数字口输出案例
/*
**功能:I3和I2口闪烁
*/
//两者定义方式选一
//int led1 = 3; //全局变量定义,存储于RAM
//int led2 = 2; //全局变量定义,存储于RAM
#define led1 3 //宏定义,预处理,存储于FLASH
#define led2 2 //宏定义,预处理,存储于FLASH
void setup() {
pinMode(led1, OUTPUT); //设定数字端口模式为输出
pinMode(led2, OUTPUT); //设定数字端口模式为输出
}
void loop(){
digitalWrite(led1, HIGH); // 点亮LED
digitalWrite(led2, LOW); // 点亮LED
delay(1000); // 等待一秒钟
digitalWrite(led1, LOW); // 通过将引脚电平拉低,关闭LED
digitalWrite(led2, HIGH); // 点亮LED
delay(1000); // 等待一秒钟
}
数字口输入案例
/*
**功能:I4口输入,确定I3口输出灯
*/
#define Key1 4 //宏定义,预处理,存储于FLASH
#define led1 3 //宏定义,预处理,存储于FLASH
int val; //定义变量val
void setup(){
pinMode(led1,OUTPUT); //定义小灯接口为输出接口
pinMode(Key1,INPUT); //定义按键接口为输入接口
}
void loop(){
val=digitalRead(Key1); //读取数字4口电平值赋给val
if(val==LOW){ //检测按键是否按下,按键按下时小灯亮起
digitalWrite(led1,LOW);
}
else{
digitalWrite(led1,HIGH);
}
}
串口输出”Hello world ”案例的函数
(1)Serial.begin(speed):
参数speed是指串口通信波特率:300、600、1200、2400、4800、9600、14400、19200、28800、38400、57600、115200
(2)Serial.begin(speed,config):
初始化串口,可配置串口的各项参数。
参数speed是指串口通信波特率。
参数config是指串口通讯的数据位、校验位、停止位配置。
(3)Serial.available():
函数功能:获取串口接收到的数据个数,即获取串口接收缓冲区中的字节数。接受缓冲区最多可保存64 bytes的数据。
函数返回值:可读取的数据字节数。
配置成输入模式后,还需要使用digitalRead() 读取端口状态
函数功能:判断缓冲器状态,如果对法发送来数据过来,这个状态会变成 1,如果没有收到数据,就是 0。当数据被读取完,也会重新变成 0
(4)Serial.read() :
函数功能:调用该语句,每次都会返回一个字节的数据,这个返回值便是当前串口读取到的数据获取。
(5)Serial.print(val) :
函数功能:将数据输出到串口,数据会以ASCII形式输出。如果要以字节形式输出数据,你需要使用write() 函数。
函数参数val: 需要输出的数据,各种类型数据均可。
函数返回值:输出的字节数。
(6)Serial.println(val) :
与Serial.print相比就是,将数据输出到串口后,回车换行。
串口输出”Hello word ”案例的代码
int val; //定义变量val
int ledpin=2; //定义数字接口2
void setup(){
Serial.begin(9600); //设置波特率为9600,这里要跟软件设置相一致。
pinMode(ledpin,OUTPUT); //设置数字2 口为输出接。
}
void loop(){
val=Serial.read(); //读取PC 机发送给Arduino 的指令或字符,并将该指令或字符赋给val
if (val=='R'){ //判断接收到的指令或字符是否是“R”。
//如果接收到的是“R”字符
digitalWrite(ledpin,HIGH); //点亮数字13 口LED。
delay(500);
digitalWrite(ledpin,LOW); //熄灭数字13 口LED
delay(500);
Serial.println("Hello World!"); //显示“Hello World!”字符串
}
}
模拟口输入函数
analogRead(pin):
参数pin为指定模拟值输入的引脚编号:A0~A5
参数返回值:
Arduino Uno模拟输入功能有10位精度,即可以将0~5V的电压信号转换为0~1023的整数形式表示。
注意:
analogRead() 函数内部,已经完成了引脚的初始化。
模拟量输入案例的代码
int potpin=0; //定义模拟接口0
int ledpin=13; //定义数字接口13
int val=0; //将定义变量val,并赋初值0
void setup(){
pinMode(ledpin,OUTPUT); //定义数字接口为输出接口
Serial.begin(9600); //设置波特率为9600
}
void loop(){
digitalWrite(ledpin,HIGH); //点亮数字接口13 的LED
delay(50); //延时0.05 秒
digitalWrite(ledpin,LOW); //熄灭数字接口13 的LED
delay(50); //延时0.05 秒
val=analogRead(potpin); //读取模拟接口0的值,并将其赋给val
Serial.println(val); //显示出val的值
}
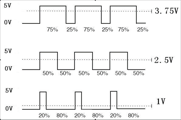
PWM的介绍
PWM为脉冲宽度调制,简称脉宽调制。脉冲宽度调制(PWM)是一种对模拟信号电平进行数字编码的方法,由于计算机不能输出模拟电压,只能输出0或5V的数字电压值,我们就通过使用高分辨率计数器,利用方波的占空比被调制的方法来对一个具体模拟信号的电平进行编码。PWM 信号仍然是数字的,因为在给定的任何时刻,满幅值的直流供电要么是5V(ON),要么是0V(OFF)。
电压或电流源是以一种通(ON)或断(OFF)的重复脉冲序列被加到模拟负载上去的。通的时候即是直流供电被加到负载上的时候,断的时候即是供电被断开的时候。只要带宽足够,任何模拟值都可以使用PWM 进行编码。输出的电压值是通过通和断的时间进行计算的。
输出电压=(接通时间/脉冲时间)*最大电压值
PWM被用在许多地方,调光灯具、电机调速、声音的制作等等。
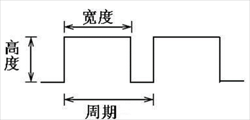
下面介绍一下PWM的三个基本参数:脉冲宽度、脉冲周期(1秒内脉冲频率个数的倒数)、电压高度(例如:0V-5V)
PWM输出函数
analogWrite(pin,value):
参数pin为指定模拟值输入的引脚编号:3、5、6、9、10、11
参数value指定是PWM的脉冲宽度,范围为0~255。
注意:
analogWrite() 函数内部,已经完成了引脚的初始化。
PWM调控灯光案例源代码
int potpin=0; //定义模拟接口0
int ledpin=3; //定义数字接口3(PWM 输出)
int val=0; // 暂存来自传感器的变量数值
void setup(){
pinMode(ledpin,OUTPUT); //定义数字接口3 为输出
Serial.begin(9600); //设置波特率为9600
}
void loop(){
val=analogRead(potpin); // 读取传感器的模拟值并赋值给val
Serial.println(val); // 显示val 变量
analogWrite(ledpin,val/4); // 打开LED 并设置亮度(PWM 输出最大值255)
delay(10); //延时10ms
}
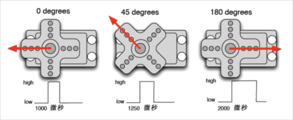
舵机的介绍
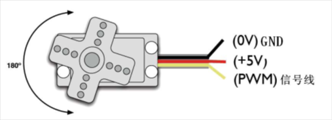
舵机是一种位置伺服的驱动器,主要是由外壳、电路板、无核心马达、齿轮与位置检测器所构成。其工作原理是由接收机或者单片机发出信号给舵机,其内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。经由电路板上的IC判断转动方向,再驱动无核心马达开始转动,透过减速齿轮将动力传至摆臂,同时由位置检测器送回信号,判断是否已经到达定位。适用于那些需要角度不断变化并可以保持的控制系统。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。一般舵机旋转的角度范围是0度到180度。
舵机有很多规格,但所有的舵机都有外接三根线,分别用棕、红、橙三种颜色进行区分,由于舵机品牌不同,颜色也会有所差异,棕色为接地线,红色为电源正极线,橙色为信号线。
舵机的控制
舵机的转动的角度是通过调节PWM(脉冲宽度调制)信号的占空比来实现的,标准PWM(脉冲宽度调制)信号的周期固定为20ms(50Hz),理论上脉宽分布应在1ms到2ms 之间,但是,事实上脉宽可由0.5ms 到2.5ms 之间,脉宽和舵机的转角0°~180°相对应。有一点值得注意的地方,由于舵机牌子不同,对于同一信号,不同牌子的舵机旋转的角度也会有所不同。
用Arduino 控制舵机的方法有两种:
第一种是通过Arduino 的普通数字传感器接口产生占空比不同的方波,模拟产生PWM 信号进行舵机定位。
第二种是直接利用Arduino自带的Servo函数进行舵机的控制,这种控制方法的优点在于程序编写,缺点是只能控制2 路舵机,因为Arduino 自带函数只能利用数字9、10 接口。
Arduino 的驱动能力有限,所以当需要控制1 个以上的舵机时需要外接电源。
第一种舵机控制的案例代码
int servopin=9; //设置舵机驱动脚到数字口9
int myangle; //定义角度变量
int pulsewidth; //定义脉宽变量
int val;
void servopulse(int servopin,int myangle){ //构建函数
pulsewidth=(myangle*11)+500; //将角度转化为500-2480 的脉宽值
digitalWrite(servopin,HIGH); //将舵机接口电平置高
delayMicroseconds(pulsewidth); //延时脉宽值的微秒数
digitalWrite(servopin,LOW); //将舵机接口电平置低
delay(20-pulsewidth/1000); //延时周期内剩余时间
}
void setup(){
pinMode(servopin,OUTPUT); //设定舵机接口为输出接口
Serial.begin(9600); //设置波特率为9600
Serial.println("servo=o_seral_simple ready" ) ;
}
void loop(){ //将0到9的数转化为0到180角度,并让
val=Serial.read(); //读取串口收到的数据
if(val>'0'&&val<='9'){ //判断收到数据值是否符合范围
val=val-'0'; //将ASCII码转换成数值,例'9'-'0'=0x39-0x30=9
val=val*(180/9); //将数字转化为角度,例9*(180/9)=180
Serial.print("moving servo to ");
Serial.print(val,DEC);
Serial.println();
for(int i=0;i<=50;i++){ //给予舵机足够的时间让它转到指定角度
servopulse(servopin,val); //引用脉冲函数
}
}
}
Servo库函数
(1)attach(pin):
参数pin为指定模拟值输入的引脚编号:9和10
作用:将Servo变量附加到引脚, Servo库仅支持将舵机连接至第9和第10脚上。
函数形式:
servo.attach(pin)
servo.attach(pin, min, max)
函数参数:
servo,一个类型为servo的变量
pin,连接至舵机的引脚编号
min(可选),舵机为最小角度(0度)时的脉冲宽度,单位为微秒,默认为544 max(可选),舵机为最大角度(180度时)的脉冲宽度,单位为微秒,默认为2400
(2)write(angle):
作用:向舵机写入一个数值,来直接控制舵机的轴。在一个标准的舵机中,这将设定齿轮的角度,将齿轮转到对应的位置。在一个连续旋转的舵机中,这将设置一个舵机的角度(0作为全速向一边,180为全速向另一边,在90附近的值为停止)。
函数形式:
servo.write(angle)
函数参数:
servo,一个类型为servo的变量
angle,写向舵机的角度,从0到180之间
(3)read():
作用:读取舵机当前的角度(最后一次用write()函数写入的值)。
函数形式:
servo.read()
函数参数:
servo,一个类型为servo的变量
返回值:舵机的角度,从0至180度
(4)writeMicroseconds():
作用:向舵机写入一个微秒的值来控制舵机的轴。在一个标准舵机中,这将设置舵机齿轮的角度。在标准舵机中,参数设置为1000为完全逆时针方向,2000完全顺时针方向,1500为在中间。
函数形式:
servo.writeMicroseconds(uS)
函数参数:
servo,一个类型为servo的变量
uS,一个代表微秒值的整数参数
注意:
一些生产厂商没有按照这个标准,以至于,舵机通常响应在700到2300之间的值。自由地增加终点值直到舵机不再增加它的范围。注意,让舵机旋转超过它的终点(通常会发出异常声响)是一个高电流状态,应该被避免。
连续旋转舵机对该函数的响应类似于write()函数
(5)attached():
作用:检查一个servo变量是否被附加到一个引脚。
函数形式:
servo.attached()
函数参数:
servo,一个类型为servo的变量
返回值:返回true,如果被附加到一个引脚,反之返回false
(6)detach():
作用:将servo变量与引脚脱离,如果所有servo变量均被脱离,第9和第10教将可以用analogWrite()函数进行PWM输出。
函数形式:
servo.detach()
函数参数:
servo,一个类型为servo的变量
第二种舵机控制的案例代码
#include <Servo.h>
Servo myservo; //先定义自己的舵机的名称
void setup() {
myservo.attach(9); //舵机控制脚的定义
}
void loop() {
myservo.write(0); //舵机转到0度位
delay(2000);
myservo.write(180); //舵机转到180度位
delay(2000);
}
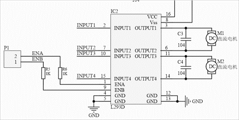
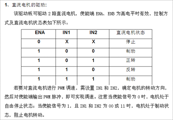
直流电机(行走电机)的介绍

直流电机控制的案例代码(不用PWM)
#include <Servo.h>
int motor1_1 =10; //直流电机接口(IN1)
int motor1_2 =11; //直流电机接口(IN2)
void setup(){
pinMode(motor1_1 ,OUTPUT); // PIN 10
pinMode(motor1_2,OUTPUT); // PIN 11
}
void run(int time){ // 前进
digitalWrite(motor1_1 ,HIGH); // 右电机前进
digitalWrite(motor1_2,LOW);
//digitalWrite(motor1_1 , LOW); // 右电机后进
//digitalWrite(motor1_2, HIGH);
}
void loop(){
run(10);
}
直流电机控制的案例代码(用PWM)
int motor1_1 =10; //直流电机接口(IN1)
int motor1_2 =11; //直流电机接口(IN2)
void setup(){
pinMode(motor1_1,OUTPUT); // PIN 10
pinMode(motor1_2,OUTPUT); // PIN 11
}
void run(int time){ // 前进
analogWrite(motor1_1 ,130); //PWM比例0~255调速,左右轮差异略增减
analogWrite(motor1_2,0);
}
void loop(){
run(10); //前进
}

