【翻译】Kinect v1和Kinect v2的彻底比较
本连载主要是比较Kinect for Windows的现行版(v1)和次世代型的开发者预览版(v2),以C++开发者为背景介绍进化的硬件和软件。本文主要是对传感的配置和运行条件进行彻底的比较。
本连载介绍的Kinect for Windows Developer Preview是暂定的,软件、硬件以及API有可能因为最终的产品版发生变更,还请谅解。
关于本连载
本连载主要是比较次世代型的Kinect for Windows(后面称作Kinect v2预览版)和现行型的Kinect for Windows(后面称作Kinect v1)的同时,介绍面向c++开发者而进化的硬件和软件。(本网站也发布了对应C#/Visual Basic开发者的内容,.NET开发者可以同时参考[新型Kinect for Windows v2 Developer Preview programing入门])
次世代型的Kinect for Windows
2012年美国微软发售的Kinect v1,因为可以很方便就能取得Depth(深度)和 skeleton(人物姿势)等信息,被全世界的开发者和研究人员关注。
2014年预定发售的Kinect v2,预测在硬件和软件上会做很大的进化,在销售前,开发者向的预览版的Kinect v2(传感器)和SDK v2(软件开发套件)很早就发布了出来。
还有,因为这个开发者向的早期提供程序是必须签订NDA(密码保持契约),本稿有不能公布的事项也事先请各位谅解。
Kinect v1和Kinect v2预览版的外观比较
Kinect v1(图1)和Kinect v2 预览版(图2)的外观的照片。

图1 Kinect for Windows v1(现行型)
Kinect v1的Depth传感器,采用了「Light Coding」的方式,读取投射的红外线pattern,通过pattern的变形来取得Depth的信息。为此,Depth传感器分为投射红外线pattern的IR Projector(左)和读取的这个的IR Camera(右)。还有Depth传感器中间还搭载了Color Camera。
Light Coding是以色列的PrimeSense公司的Depth传感器技术,于2013年被美国苹果公司收购。

图2 Kinect for Windows v2(次世代型)预览版
Kinect V2预览版的Depth传感器,采用的是「Time of Flight(TOF)」的方式,通过从投射的红外线反射后返回的时间来取得Depth信息。Depth传感器看不到外观,不过Color Camera旁边是红外线Camera(左)和投射脉冲变调红外线的Porjector(右)。
微软过去收购过使用TOF方式处理Depth传感器技术的公司(注:应该是指的3DV),已经在使用这个技术,不过没有详细的公布。
Kinect v1和Kinect v2预览版的配置比较
Kinect v1和Kinect v2预览版的传感器的配置比较在表1显示。
| Kinect v1 | Kinect v2预览版 | ||
|---|---|---|---|
| 颜色(Color) | 分辨率(Resolution) | 640×480 | 1920×1080 |
| fps | 30fps | 30fps | |
| 深度(Depth) | 分辨率(Resolution) | 320×240 | 512×424 |
| fps | 30fps | 30fps | |
| 人物数量(Player) | 6人 | 6人 | |
| 人物姿势(Skeleton) | 2人 | 6人 | |
| 関節(Joint) | 20関節/人 | 25関節/人 | |
| 手的開閉状態(Hand State) | △(Developer Toolkit) | ○(SDK) | |
| 检测範囲(Range of Detection) | 0.8~4.0m | 0.5~4.5m | |
| 角度(Angle)(Depth) | 水平(Horizontal) | 57度 | 70度 |
| 垂直(Vertical) | 43度 | 60度 | |
| (Tilt Motor) | ○ | ×(手動) | |
| 複数的App | ×(単一的App) | ○ | |
表1是Kinect v1和Kinect v2预览版的传感器的配置比较
Kinect v1的Color Camera的分辨率是640x480较低,不能取得非常漂亮的图像,Kinect v2预览版的分辨率大幅提高,能取得1920×1080非常漂亮的图像(图3)。
(注:v1的要求是USB2.0理论传输速率是60MB/s,v2是USB3.0理论传输速率是500MB/s。可以计算一下,以XRGB Color为例,30fps,那么每秒所需传输的数据大小为640 x 480 x 4 x 30约为35M;再加上USHORT格式的Depth Color,30fps,大小为320 x 240 x 2 x 30约为4M。总计约为40MB/s,因为带宽有限,所以在保证画面帧率稳定的情况下,分辨率只能如此,而且基本上必须独占一个USB Controller。再算算v2的情况,Color = 1920 x 1080 x 4 x 30 约为237M,Depth = 512 x 424 x 2 x 30约为12M,总计约为250M/s。所以非USB3.0不可,否则传输不了这么大的数据量。显而易见,Color Map是最占带宽的,其实可以通过一些其他格式,比如I420或MJPG来减少数据量,然后通过CPU或GPU来进行解压和回放。)
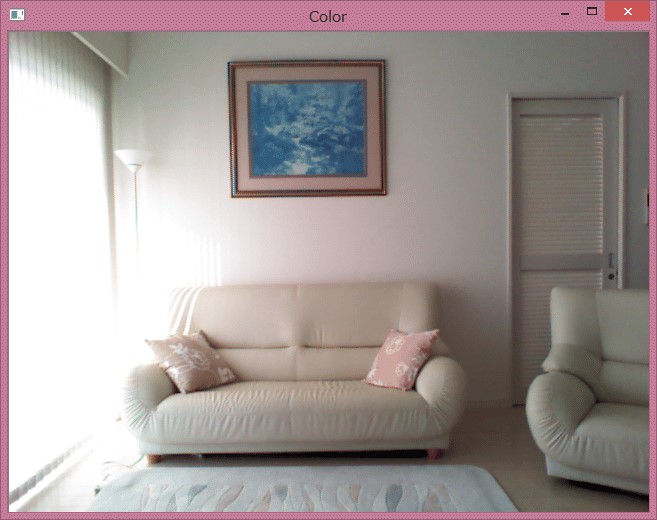

图3 Kinect v1和Kinect v2预览版的Color
Kinect v2预览版的Depth传感器的分辨率也提高到512×424,而Kinect v1是可以取640×480分辨率的Depth数据,乍一看规格好像下降了,其实Kinect v1的Depth传感器的物理分辨率是320x240,Up Sacling到640x480而已(注:猜测是Runtime处理的)。另外,Depth传感器的方式也是从Light Coding变更为Time of Flight(TOF)。
不能详细叙述,不过Kinect V2预览版Depth数据的精度也提高了(图4),关于精度还敬请等待产品版。

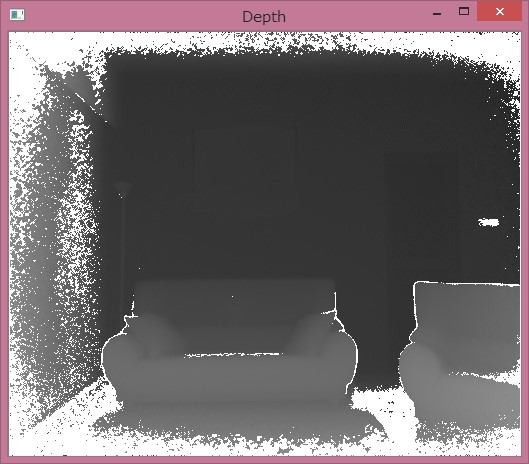
图4 Kinect v1和Kinect v2预览版的Depth
Kinect v1,v2预览版可以取得Player(可识别的人体)数量都是6人。Kinect v2预览版因为Depth传感器的分辨率提高了,用Player数据只需要简单的剪切就可以很漂亮得把背景和人物分离。
Kinect v1可以取得全部关节(Joint)的skeleton的数量是2人,随着Depth传感器的分辨率上升和视角的宽广,Kinect v2预览版变得能取得6人。
还有,Kinect v1能取得的Joint是20个Joint每人,Kinect v2预览版变为能取得25个Joint。具体的如图5所示,头(Neck),指尖(HAND_TIP_LEFT,HAND_TIP_RIGHT),大拇指(THUMB_LEFT,THUMB_RIGHT),增加了这5个Joint。不仅仅是手的位置,大拇指和指尖的细小信息也可以获取到。
Hand State(手的开闭状态)的识别,Kinect v1是靠Developer Toolkit里的「Kinect Interaction」库来支持,不过在Kinect V2预览版SDK里是标准支持。

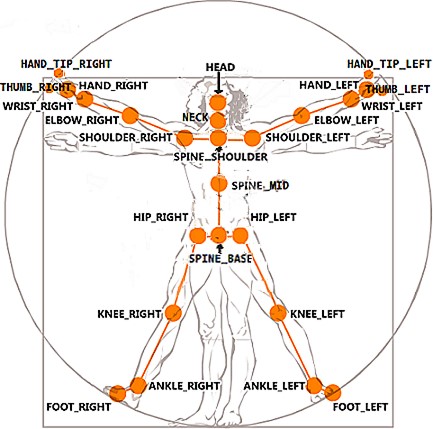
Kinect v1和Kinect v2预览版可以取得的Joint
Kinect v1为了摇头装载了倾斜电机(Tilt motor),也有视角扩展,Kinect v2预览版没有搭载Tilt motor,靠手动来摇头。
Kinect v1不能多个应用程序同时连接到一个传感器。Kinect v2预览版通过「Kinect Service」,可以让多个应用程序同时从传感器取得数据(参考图6)
现在,Kinect Service作为常驻程序被提供, 一般认为产品版里会成为Windows的服务(Service)。
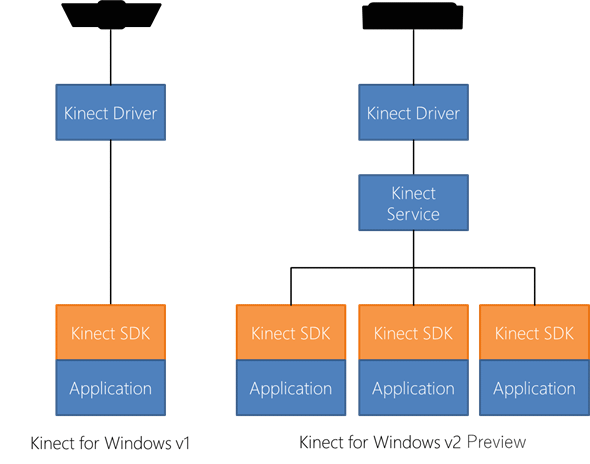
图6 通过Kinect Service,对应多个应用程序
Kinect v1和Kinect v2 预览版的运行环境的比较表(表2)。
| Kinect v1 | Kinect v2预览版 | |
|---|---|---|
| OS | Windows 7以后 | Windows 8以后 |
| 编译器(Compiler) | Visual Studio 2010以后 | Visual Studio 2012以后 |
| 接続端子(Connector) | USB 2.0 | USB 3.0 |
| CPU | Dual-Core 2.66GHz | Dual-Core 2.66GHz |
| GPU | DirectX 9.0c | DirectX 11.0 |
| RAM | 2.0GBytes | 2.0 GBytes |
Kinect v1要在Windows 7以后的版本上运行,Kinect v2要求是在Windows 8 运行。关于Visual Studio也要求是2012以后的版本。
Kinect v1要求USB 2.0(或更快的USB)来运行,因为Kinect 2预览版传感器的分辨率也提高了,需要更快的USB 3.0来运行。Kinect v1和Kinect v2预览版的专有USB总线带宽都没有变化。
Kinect v1和Kinect v2预览版都有与部分USB Host Controller不兼容而导致不能正常运行的情况,现在是Renesas和Intel的USB 3.0 Host Controller可以运行。台式PC也可以增加USB3.0扩展卡来对应。
CPU方面,和Kinect v1一样,要求Dual Core 2.66 GHz以上。「时钟频率较低」一类的运行环境也稍微下降了,不是特别差的情况都可以运行,不过注意传感器分辨率提高,取得的数据的处理消耗也上升了。
Kinect v1要求的是支持DirectX 9.0c的GPU(Kinect Fusion除外),Kinect v2预览版要求支持DirectX 11.0以后的GPU,像笔记本这种没有装载NVIDIA GeForce和AMD Radeon外置GPU(独立显卡)的很多无法运行,而像有Intel HD Graphics这种支持DirectX 11.0以后的处理器内置的GPU(集成显卡)是可以运行的。
如上展示了Kinect v2预览版的必要运行环境,和前述一样在产品版中有变更的可能性,现在还不需要着急准备对应环境。关于USB Host Controller的兼容性今后也有解决的可能,希望起到参考的作用。
总结
这次彻底的比较了Kinect v1和Kinect v2预览版的传感器配置和必要运行环境,下一回是关于使用Kinect SDK v2.0预览版的C++的程序设计方法在v1和v2预览版上的比较和介绍。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号