
12 pinctrl 和 gpio 子系统
一、pinctrl 子系统
1. 什么是 pinctrl 子系统?
首先回顾一下如何初始化 LED 所使用的 GPIO:
①、修改设备树,添加相应的节点,节点里面重点是设置 reg 属性, reg 属性包括了 GPIO相关寄存器。
②、获取 reg 属性中 GPIOI_MODER、 GPIOI_OTYPER、 GPIOI_OSPEEDR、 GPIOI_PUPDR和 GPIOI_BSRR 这些寄存器的地址,并且初始化它们,这些寄存器用于设置 PI0 这个 PIN 的复用功能、上下拉、速度等。
③、在②里面将 PI0 这个 PIN 设置为通用输出功能,因此需要设置 PI0 这个 GPIO 相关的寄存器,也就是设置 GPIOI_MODER 寄存器。
④、在②里面将 PI0 这个 PIN 设置为高速、上拉和推挽模式,就要需要设置 PI0 的GPIOI_OTYPER、 GPIOI_OSPEEDR 和 GPIOI_PUPDR 这些寄存器。
其实这些设置跟 STM32 单片机的 GPIO 设置极为相似,但传统的配置 pin 的方式就是直接操作相应的寄存器,但是这种配置方式比较繁琐、而且容易出问题(比如 pin 功能冲突)。pinctrl 子系统就是为了解决这个问题而引入的, pinctrl 子系统主要工作内容如下:
①、获取设备树中 pin 信息。
②、根据获取到的 pin 信息来设置 pin 的复用功能
③、根据获取到的 pin 信息来设置 pin 的电气特性,比如上/下拉、速度、驱动能力等。
对于我们使用者来讲,只需要在设备树里面设置好某个 pin 的相关属性即可,其他的初始化工作均由 pinctrl 子系统来完成,总而言之, pinctrl 子系统将一个 PIN 复用为 GPIO 。
2. STM32MP1 的 pinctrl 子系统驱动
要使用 pinctrl 子系统,我们需要在设备树里面设置 PIN 的配置信息一般会在设备树里面创建一个节点来描述 PIN 的配置信息。打开 stm32mp157.dtsi 文件,找到一个叫做 pinctrl 的节点:
pinctrl: pin-controller@50002000 {
#address-cells = <1>;
#size-cells = <1>; // pinctrl的所有子节点的reg第一位是起始地址,第二位是长度
compatible = "st,stm32mp157-pinctrl";
ranges = <0 0x50002000 0xa400>; // ranges属性表示 STM32MP1 的 GPIO 相关寄存器起始地址
interrupt-parent = <&exti>; // 父中断为 exti
st,syscfg = <&exti 0x60 0xff>;
hwlocks = <&hsem 0 1>;
pins-are-numbered;
......
};
/*
STM32MP1最多拥有176个GPIO,分别有 PA0~PA15 .... PZ0~PZ15,PA~PK,起始地址为 0X50002000,终止地址为 0X5000C3FF
PZ 组寄存器起始地址为 0X54004000,终止地址为 0X540043FF,所以 stm32mp151.dtsi 文件里面还有个名为“pinctrl_z”
pinctrl 节点用来描述 PA~PK 这 11 组 IO,因此 ranges 属性中的 0x50002000 表示起始地址, 0xa400 表示寄存器地址范围
*/在 pins 子节点里面存放外设的引脚描述信息:
① pinmux 属性
此属性用来存放外设所要使用的所有 IO ,比如:
pinmux = <STM32_PINMUX('H', 13, AF9)>; // 使用 STM32_PINMUX 这宏来配置引脚和引脚的复用功能
/*
* @description : 配置引脚和引脚的复用功能
* @param - port : 表示用那一组 GPIO(例: H 表示为 GPIO 第 H 组,也就是 GPIOH)
* @param - line : 表示这组 GPIO 的第几个引脚(例: 13 表示为 GPIOH_13,也就是 PH13)
* @param - mode : 表示当前引脚要做那种复用功能(例: AF9 表示为用第 9 个复用功能)这个需要查阅 STM32MP1 数据手册来确定使用哪个复用功能
* @return : 找到的父节点
建议一个 PIN 最好只能被一个外设使用
*/
STM32_PINMUX(port, line, mode);如果一个 PIN 只是作为最基本的 GPIO 功能,那么就是用“GPIO”;如果这个引脚要用作模拟功能,比如 ADC 采集引脚,那么就设置为“ANALOG”。
② 电气属性
电气特性在 pinctrl 子系统里不是必须的,可以不配置,但是 pinmux 属性是必须要设置的。
| 电气特性属性 | 类型 | 作用 |
| bias-disable | bootlean | 禁止使用内部偏置电压 |
| bias-pull-down | bootlean | 内部下拉 |
| bias-pull-up | bootlean | 内部上拉 |
| drive-push-pull | bootlean | 推挽输出 |
| drive-open-drain | bootlean | 开漏输出 |
| output-low | bootlean | 输出低电平 |
| output-high | bootlean | 输出高电平 |
| slew-rate | enum | 引脚的速度,可设置: 0~3, 0 最慢, 3 最高。 |
bootlean 类型表示了在 pinctrl 子系统只要定义这个电气属性就行了,例如:我要禁用内部电压,只要在 PIN 的配置集里添加“bias-disable”即可,这个时候 bias-pull-down和 bias-pull-up 都不能使用了,因为已经禁用了内部电压,所以不能配置上下拉。 enum 类型使用方法比如要设置 PIN 速度为最低就可以使用“slew-rate=<0>”。
3. 设备树中添加 pinctrl 节点模板
比如我们需要将 PG11 这个 PIN 复用为 UART4_TX 引脚, pinctrl 节点添加过程如下:
① 创建对应的节点
在 pinctrl 节点下添加一个“uart4_pins”节点:
&pinctrl {
uart4_pins: uart4-0 {
/* 具体的 PIN 信息 */
};
};
② 添加“pins”属性
添加一个“pins”子节点,这个子节点是真正用来描述 PIN 配置信,要注意,同一个 pins子节点下的所有 PIN 电气属性要一样。如果某个外设所用的 PIN 可能有不同的配置,那么就需要多个 pins 子节点,例如 UART4 的 TX 和 RX 引脚配置不同,因此就有 pins1 和 pins2 两个子节点。
&pinctrl {
uart4_pins: uart4-0 {
pins1 {
/* UART4 TX 引脚的 PIN 配置信息 */
};
};
};
③ 在“pins”节点中添加 PIN 配置信息
最后在“pins”节点中添加具体的 PIN 配置信息:
&pinctrl {
uart4_pins: uart4-0 {
pins1 {
pinmux = <STM32_PINMUX('G', 11, AF6)>; /* UART4_TX */
bias-disable;
drive-push-pull;
};
};
};对于 STM32MP1 而言,如果一个 IO 用作 GPIO 功能的时候不需要创建对应的 pinctrl 节点!
二、gpio 子系统
1. gpio 子系统简介
gpio 子系统用于初始化 GPIO 并且提供相应的 API 函数,比如设置 GPIO 为输入输出,读取 GPIO 的值等。目的就是方便驱动开发者使用 gpio,驱动开发者在设备树中添加 gpio 相关信息,然后就可以在驱动程序中使用 gpio 子系统提供的 API 函数来操作 GPIO 。
2. STM32MP1 的 gpio 子系统驱动
① 设备树中的 gpio 信息
以 PI0 这个引脚所在的 GPIOI 为例,打开stm32mp151.dtsi :
pinctrl: pin-controller@50002000 {
#address-cells = <1>;
#size-cells = <1>;
compatible = "st,stm32mp157-pinctrl";
...
gpioi: gpio@5000a000 {
gpio-controller; // 表示 gpioi 节点是个 GPIO 控制器,每个 GPIO 控制器节点必须包含“gpio-controller”属性
#gpio-cells = <2>; // “#gpio-cells”属性和“#address-cells”类似,第一个cell是GPIO编号,第二个cell是GPIO极性,0为高电平有效,1为低电平有效
interrupt-controller; // 声明此节点为中断控制器
#interrupt-cells = <2>;
reg = <0x8000 0x400>; // reg 属性设置了 GPIOI 控制器的寄存器基地址偏移为 0X8000,因此 GPIOI 寄存器地址为 0X50002000+0X8000=0X5000A000
clocks = <&rcc GPIOI>; // 指定这个 GPIOI 控制器的时钟
st,bank-name = "GPIOI";
status = "disabled"; // 设备状态为禁用
};
};gpioi:gpio@5000a000 以下就是 GPIOI 的控制信息,属于 pincrtl 的子节点。因为两个子系统的驱动文件一样,所以注册 pinctrl 驱动的时候就会把 gpio 驱动一起注册。
在 ST 光放的 EVK 开发板是将 PG1 用作 SD 卡检测 (CD) 引脚:
cd-gpios = <&gpiog 1 (GPIO_ACTIVE_LOW | GPIO_PULL_UP)>;
/*
&gpiog : 表示 CD 引脚所使用的 IO 属于 GPIOG 组
1 : 表示 GPIOG 组的第 1 号 IO。通过 &gpiog 1 知道,CD引脚使用了PG1
GPIO_ACTIVE_LOW | GPIO_PULL_UP : 低电平有效(当 PG1 被拉低的时候表示 SD 卡插入) | 上拉电阻
*/PG1 用作 GPIO 的时候不需要添加其对应的 pincrl 节点
② GPIO 驱动程序简介
STM32MP1 的 pinctrl驱动和 gpio 驱动是同一个驱动文件,都为 pinctrl-stm32mp157.c , 入口函数都是 stm32_pctl_probe 这个函数:
int stm32_pctl_probe(struct platform_device *pdev)
{
...
for_each_available_child_of_node(np, child) {
if (of_property_read_bool(child, "gpio-controller")) { // 判断设备树节点,是否有 gpio-controller,如果存在,那么这个节点就是一个GPIO 控制器节点
ret = stm32_gpiolib_register_bank(pctl, child); // 注册 GPIO 驱动,包括生成回调函数
if (ret) {
of_node_put(child);
return ret;
}
}
}
...
}
3. gpio 子系统 API 函数
① gpio_request 函数
/*
* @description : 用于申请一个 GPIO 管脚,在使用一个 GPIO 之前一定要使用 gpio_request进行申请
* @param - gpio : 要申请的 gpio 标号,使用 of_get_named_gpio 函数从设备树获取指定 GPIO 属性信息,此函数会返回这个 GPIO 的标号
* @param - label : 给 gpio 设置个名字
* @return : 0,申请成功;其他值,申请失败
*/
int gpio_request(unsigned gpio, const char *label);
② gpio_free 函数
/*
* @description : 如果不使用某个 GPIO 了,那么就可以调用 gpio_free 函数进行释放
* @param - gpio : 要释放的 gpio 标号
* @return : 无
*/
void gpio_free(unsigned gpio);
③ gpio_direction_input 函数
/*
* @description : 用于设置某个 GPIO 为输入
* @param - gpio : 要设置为输入的 GPIO 标号
* @return : 0,设置成功;负值,设置失败
*/
int gpio_direction_input(unsigned gpio);
④ gpio_direction_output 函数
/*
* @description : 设置某个 GPIO 为输出,并且设置默认输出值
* @param - gpio : 要设置为输出的 GPIO 标号
* @param - value : GPIO 默认输出值
* @return : 0,设置成功;负值,设置失败
*/
int gpio_direction_output(unsigned gpio, int value);
⑤ gpio_get_value 函数
/*
* @description : 用于获取某个 GPIO 的值(0 或 1),此函数是个宏
* @param - gpio : 要获取的 GPIO 标号
* @return : 非负值,得到的 GPIO 值;负值,获取失败
*/
#define gpio_get_value __gpio_get_value
int __gpio_get_value(unsigned gpio);
⑥ gpio_set_value 函数
/*
* @description : 设置某个 GPIO 的值,此函数是个宏
* @param - gpio : 要设置的 GPIO 标号
* @param - value : 要设置的值
* @return : 无
*/
#define gpio_set_value __gpio_set_value
void __gpio_set_value(unsigned gpio, int value);
4. 设备树中添加 gpio 节点模板
① 创建 led 设备节点
led {
/* 节点内容 */
};
② 添加 GPIO 属性信息
led {
compatible = "atk,led";
gpio = <&gpioi 0 GPIO_ACTIVE_LOW>;
status = "okay";
};
5. 常用 gpio 相关的 OF 函数
① of_gpio_named_count 函数
/*
* @description : 用于获取设备树某个属性里面定义了几个 GPIO 信息,要注意的是空的 GPIO 信息也会被统计到
* @param - np : 设备节点
* @param - propname : 要统计的 GPIO 属性
* @return : 正值,统计到的 GPIO 数量;负值,失败
*/
int of_gpio_named_count(struct device_node *np, const char *propname);
② of_gpio_count 函数
/*
* @description : 函数统计的是“gpios”这个属性的 GPIO 数量,而 of_gpio_named_count 函数可以统计任意属性的 GPIO 信息
* @param - np : 设备节点
* @return : 正值,统计到的 GPIO 数量;负值,失败
*/
int of_gpio_count(struct device_node *np);
③ of_get_named_gpio 函数
/*
* @description : 获取 GPIO 编号,编号很重要,因为 Linux 内核中关于 GPIO 的 API 函数都要使用 GPIO 编号
* @param - np : 设备节点
* @param - propname : 包含要获取 GPIO 信息的属性名
* @param - index : GPIO 索引,因为一个属性里面可能包含多个 GPIO,此参数指定要获取哪个 GPIO的编号,如果只有一个 GPIO 信息的话此参数为 0
* @return : 正值,获取到的 GPIO 编号;负值,失败
*/
int of_get_named_gpio(struct device_node *np,
const char *propname,
int index);总结:我感觉这里比较绕,主要是区分 pinctrl 子系统和 gpio 子系统的区别:
pinctrl 子系统:引脚复用(可以把某个引脚作为普通的GPIO,也可也作为UART的TX),引脚配置(电气配置);
gpio 子系统:输入时(支持读引脚),输出时(支持输出高低电平)。
gpio 子系统主要用于控制和读取通用的输入/输出引脚,而 pinctrl 子系统主要用于管理和配置硬件引脚的功能和复用。
三、实验程序编写
1. 修改设备树文件
首先在 ~/linux/atk-mpl/linux/my_linux/linux-5.4.31/arch/arm/boot/dts 路径下找到 stm32mp157d-atk.dts 文件,在根节点 "/" 下创建 LED 节点:
gpioled {
compatible = "alientek,led";
status = "okay";
led-gpio = <&gpioi 0 GPIO_ACTIVE_LOW>; // 这里使用GPIOI 0 ,低电平有效
};之后在 /linux/atk-mpl/linux/my_linux/linux-5.4.31 路径下输入以下命令来编译 stm32mp157d-atk.dts:
make dtbs
cd /arch/arm/boot/dts
sudo cp stm32mp157d-atk.dtb /home/alientek/linux/tftpboot/ -f进入 /proc/device-tree 查看 gpioled 节点是否存在:
2. LED 灯驱动程序编写
跟上一节一样,创建 5_gpioled 文件,在里面创建 Vscode 工作区,并新建 gpioled.c 文件。
#include <linux/types.h>
#include <linux/kernel.h>
#include <linux/delay.h>
#include <linux/ide.h>
#include <linux/init.h>
#include <linux/module.h>
#include <linux/errno.h>
#include <linux/gpio.h>
#include <linux/cdev.h>
#include <linux/device.h>
#include <linux/of.h>
#include <linux/of_address.h>
#include <linux/of_gpio.h>
#include <asm/mach/map.h>
#include <asm/uaccess.h>
#include <asm/io.h>
#define GPIOLED_CNT 1 /* 设备号个数 */
#define GPIOLED_NAME "gpioled" /* 名字 */
#define LEDOFF 0 /* 关灯 */
#define LEDON 1 /* 开灯 */
/* gpioled设备结构体 */
struct gpioled_dev{
dev_t devid; /* 设备号 */
struct cdev cdev; /* cdev */
struct class *class; /* 类 */
struct device *device; /* 设备 */
int major; /* 主设备号 */
int minor; /* 次设备号 */
struct device_node *nd; /* 设备节点 */
int led_gpio; /* led所使用的GPIO编号 */ // 此成员变量保存 LED 等所使用的 GPIO 编号
};
struct gpioled_dev gpioled; /* led设备 */
/*
* @description : 打开设备
* @param - inode : 传递给驱动的inode
* @param - filp : 设备文件,file结构体有个叫做private_data的成员变量
* 一般在open的时候将private_data指向设备结构体。
* @return : 0 成功;其他 失败
*/
static int led_open(struct inode *inode, struct file *filp)
{
filp->private_data = &gpioled; /* 设置私有数据 */
return 0;
}
/*
* @description : 从设备读取数据
* @param - filp : 要打开的设备文件(文件描述符)
* @param - buf : 返回给用户空间的数据缓冲区
* @param - cnt : 要读取的数据长度
* @param - offt : 相对于文件首地址的偏移
* @return : 读取的字节数,如果为负值,表示读取失败
*/
static ssize_t led_read(struct file *filp, char __user *buf, size_t cnt, loff_t *offt)
{
return 0;
}
/*
* @description : 向设备写数据
* @param - filp : 设备文件,表示打开的文件描述符
* @param - buf : 要写给设备写入的数据
* @param - cnt : 要写入的数据长度
* @param - offt : 相对于文件首地址的偏移
* @return : 写入的字节数,如果为负值,表示写入失败
*/
static ssize_t led_write(struct file *filp, const char __user *buf, size_t cnt, loff_t *offt)
{
int retvalue;
unsigned char databuf[1];
unsigned char ledstat;
struct gpioled_dev *dev = filp->private_data; // 通过读取 filp 的 private_data 成员变量来得到设备结构体变量
retvalue = copy_from_user(databuf, buf, cnt); /* 接收APP发送过来的数据 */
if(retvalue < 0) {
printk("kernel write failed!\r\n");
return -EFAULT;
}
ledstat = databuf[0]; /* 获取状态值 */
/* 调用 gpio_set_value 函数来向 GPIO 写入数据,实现开/关 LED 的效果。不需要直接操作相应的寄存器 */
if(ledstat == LEDON) {
gpio_set_value(dev->led_gpio, 0); /* 打开LED灯 */
} else if(ledstat == LEDOFF) {
gpio_set_value(dev->led_gpio, 1); /* 关闭LED灯 */
}
return 0;
}
/*
* @description : 关闭/释放设备
* @param - filp : 要关闭的设备文件(文件描述符)
* @return : 0 成功;其他 失败
*/
static int led_release(struct inode *inode, struct file *filp)
{
return 0;
}
/* 设备操作函数 */
static struct file_operations gpioled_fops = {
.owner = THIS_MODULE,
.open = led_open,
.read = led_read,
.write = led_write,
.release = led_release,
};
/*
* @description : 驱动出口函数
* @param : 无
* @return : 无
*/
static int __init led_init(void)
{
int ret = 0;
const char *str;
/* 设置LED所使用的GPIO */
/* 1、获取设备节点:gpioled */
gpioled.nd = of_find_node_by_path("/gpioled");
if(gpioled.nd == NULL) {
printk("gpioled node not find!\r\n");
return -EINVAL;
}
/* 2.读取status属性 */
ret = of_property_read_string(gpioled.nd, "status", &str); // 获取状态是否是"okay"
if(ret < 0)
return -EINVAL;
if (strcmp(str, "okay"))
return -EINVAL;
/* 3、获取compatible属性值并进行匹配 */
ret = of_property_read_string(gpioled.nd, "compatible", &str);
if(ret < 0) {
printk("gpioled: Failed to get compatible property\n");
return -EINVAL;
}
if (strcmp(str, "alientek,led")) {
printk("gpioled: Compatible match failed\n");
return -EINVAL;
}
/* 4、 获取设备树中的gpio属性,得到LED所使用的LED编号 */
gpioled.led_gpio = of_get_named_gpio(gpioled.nd, "led-gpio", 0); // 获取 LED 所使用的 LED 编号。相当于将 gpioled 节点中的“led-gpio”属性值转换为对应的 LED 编号
if(gpioled.led_gpio < 0) {
printk("can't get led-gpio");
return -EINVAL;
}
printk("led-gpio num = %d\r\n", gpioled.led_gpio);
/* 5.向gpio子系统申请使用GPIO */
ret = gpio_request(gpioled.led_gpio, "LED-GPIO"); // 这里设备树已经改成了led-gpio=<&gpioi 0 GPIO_ACTIVE_LOW>
if (ret) {
printk(KERN_ERR "gpioled: Failed to request led-gpio\n");
return ret;
}
/* 6、设置PI0为输出,并且输出高电平,默认关闭LED灯 */
ret = gpio_direction_output(gpioled.led_gpio, 1);
if(ret < 0) {
printk("can't set gpio!\r\n");
}
/* 注册字符设备驱动 */
/* 1、创建设备号 */
if (gpioled.major) { /* 定义了设备号 */
gpioled.devid = MKDEV(gpioled.major, 0);
ret = register_chrdev_region(gpioled.devid, GPIOLED_CNT, GPIOLED_NAME);
if(ret < 0) {
pr_err("cannot register %s char driver [ret=%d]\n", GPIOLED_NAME, GPIOLED_CNT);
goto free_gpio;
}
} else { /* 没有定义设备号 */
ret = alloc_chrdev_region(&gpioled.devid, 0, GPIOLED_CNT, GPIOLED_NAME); /* 申请设备号 */
if(ret < 0) {
pr_err("%s Couldn't alloc_chrdev_region, ret=%d\r\n", GPIOLED_NAME, ret);
goto free_gpio;
}
gpioled.major = MAJOR(gpioled.devid); /* 获取分配号的主设备号 */
gpioled.minor = MINOR(gpioled.devid); /* 获取分配号的次设备号 */
}
printk("gpioled major=%d,minor=%d\r\n",gpioled.major, gpioled.minor);
/* 2、初始化cdev */
gpioled.cdev.owner = THIS_MODULE;
cdev_init(&gpioled.cdev, &gpioled_fops);
/* 3、添加一个cdev */
cdev_add(&gpioled.cdev, gpioled.devid, GPIOLED_CNT);
if(ret < 0)
goto del_unregister;
/* 4、创建类 */
gpioled.class = class_create(THIS_MODULE, GPIOLED_NAME);
if (IS_ERR(gpioled.class)) {
goto del_cdev;
}
/* 5、创建设备 */
gpioled.device = device_create(gpioled.class, NULL, gpioled.devid, NULL, GPIOLED_NAME);
if (IS_ERR(gpioled.device)) {
goto destroy_class;
}
return 0;
destroy_class:
class_destroy(gpioled.class);
del_cdev:
cdev_del(&gpioled.cdev);
del_unregister:
unregister_chrdev_region(gpioled.devid, GPIOLED_CNT);
free_gpio:
gpio_free(gpioled.led_gpio);
return -EIO;
}
/*
* @description : 驱动出口函数
* @param : 无
* @return : 无
*/
static void __exit led_exit(void)
{
/* 注销字符设备驱动 */
cdev_del(&gpioled.cdev);/* 删除cdev */
unregister_chrdev_region(gpioled.devid, GPIOLED_CNT); /* 注销设备号 */
device_destroy(gpioled.class, gpioled.devid);/* 注销设备 */
class_destroy(gpioled.class);/* 注销类 */
gpio_free(gpioled.led_gpio); /* 释放GPIO */
}
module_init(led_init);
module_exit(led_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("ALIENTEK");
MODULE_INFO(intree, "Y"); 一样有一个流程图: 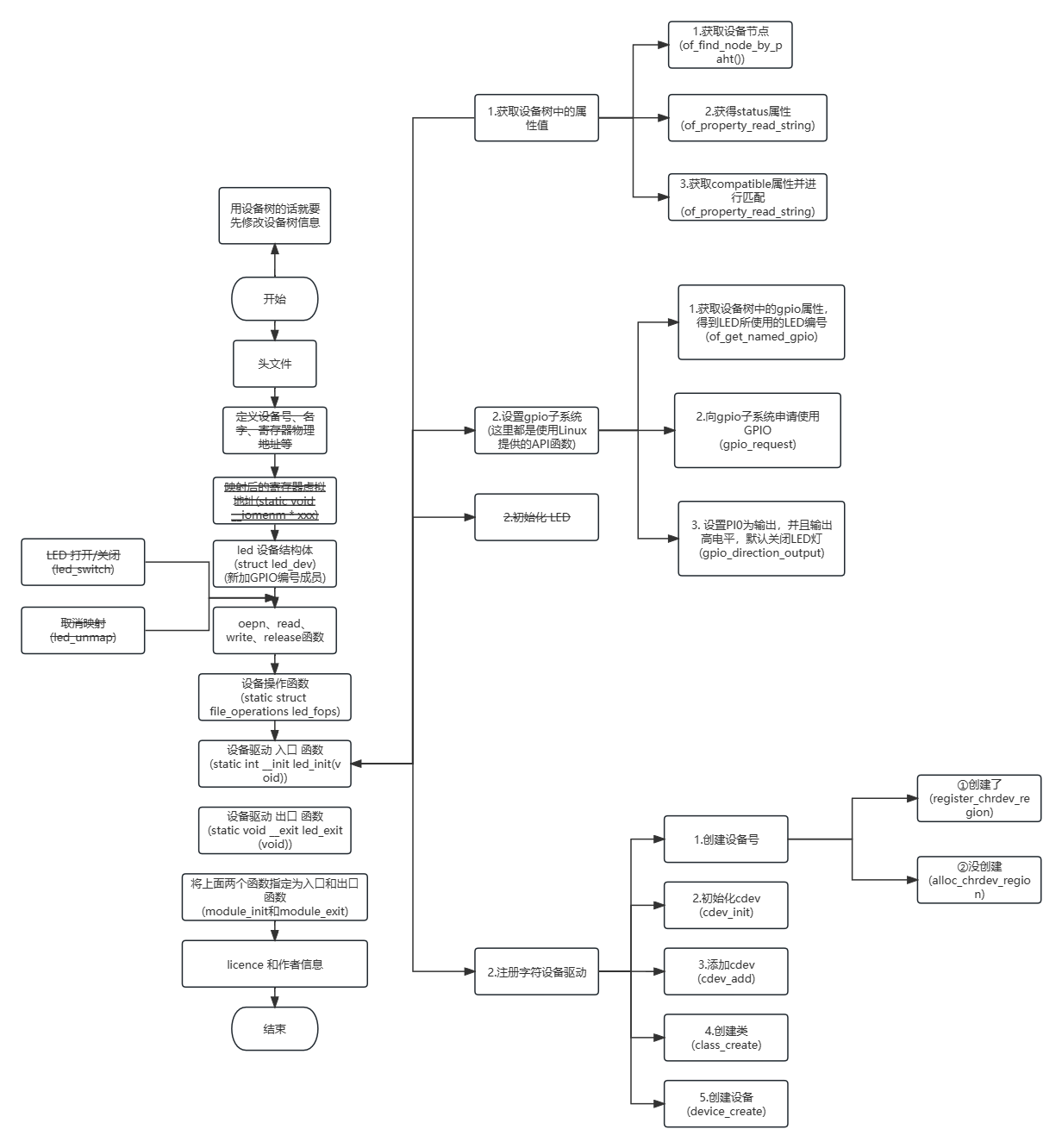
主要是简化了寄存器的配置,使用 Linux 提供的 API 函数,并且很重要的一点就是,使用 gpio 子系统的时候,需要获得设备编号,向子系统申请GPIO。
四、运行测试
1. 编写程序
跟上一节类似,只需要更改gpioled.o的地方,并且编译方式也一样。
KERNELDIR := /home/alientek/linux/atk-mpl/linux/my_linux/linux-5.4.31 # Linux内核源码路径
CURRENT_PATH := $(shell pwd) # 获取当前所处路径
obj-m := gpioled.o
build: kernel_modules
kernel_modules:
$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) modules
clean:
$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) clean之后继续编译 ledApp.c 文件:
arm-none-linux-gnueabihf-gcc ledApp.c -o ledApp将编译后的 ledApp 和 gpioled.ko 文件复制到:
sudo cp gpioled.ko ledApp /home/alientek/linux/nfs/rootfs/lib/modules/5.4.31
2. 运行测试
跟上一节一样:
depmod // 第一次加载驱动的时候需要运行此命令
modprobe gpioled // 加载驱动测试打开 LED 灯和关闭:
./ledApp /dev/gpioled 1 // 打开 LED 灯
./ledApp /dev/gpioled 0 // 关闭 LED 灯
# 最后卸载驱动
rmmod gpioled.ko
总结:有了 pinctrl 子系统和 gpio 子系统后,驱动编程变得更为简单,取消了配置寄存器的过程,改为使用 Linux 内核提供的 API 函数。
本文作者:烟儿公主
本文链接:https://www.cnblogs.com/toutiegongzhu/p/17637639.html
版权声明:本作品采用知识共享署名-非商业性使用-禁止演绎 2.5 中国大陆许可协议进行许可。


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步