


ROS2:报错:package 'turtle_tf2_py' not found
在学习tf坐标变换的乌龟小实验中,运行乌龟仿真程序出现的报错
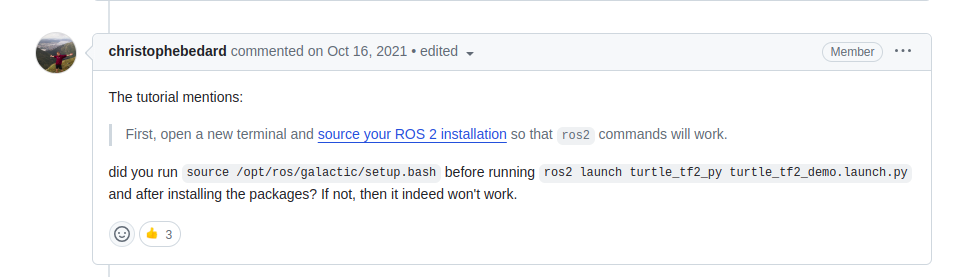
问题分析:原因还是没有先source一下
解决:首先
source /opt/ros/galactic/setup.bash
然后再运行乌龟
ros2 launch turtle_tf2_py turtle_tf2_demo.launch.py
顺带一提,一开始CSDN一篇文章提出了这种解决方法,虽然没成功,但是以防万一以后可能会用到,这个方法思路是和python有关的


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 无需6万激活码!GitHub神秘组织3小时极速复刻Manus,手把手教你使用OpenManus搭建本
· Manus爆火,是硬核还是营销?
· 终于写完轮子一部分:tcp代理 了,记录一下
· 别再用vector<bool>了!Google高级工程师:这可能是STL最大的设计失误
· 单元测试从入门到精通