
欧拉-拉格朗日方程/和机器人学上的欧拉-拉格朗日方程
对于形如

的泛函,总有f(x0)使得A(f)最小,且此时有

称之为欧拉-拉格朗日方程
L对其自变量求导,代入欧拉-拉格朗日方程和L(x,f(x),f'(x)),得到f'(x)的表达式或方程,进而得到f(x)的表达式
参考:https://www.cnblogs.com/bigmonkey/p/9519387.html
总结:对于实际问题对应成A(f),得到对应的欧拉-拉格朗日方程,进而得出使A(f)取得极值的f
机器人学上的欧拉-拉格朗日方程
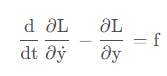
(个人理解)上面所说的欧拉-拉格朗日方程由于没有力驱动所以右侧为0,而机器人(如机械臂)关节通过电机驱动,得到
使用拉格朗日算子L = K - P即动能K和势能P的差描述机器人动力学
1. 其中K通过线速度和角速度描述
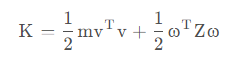
速度又通过雅可比矩阵描述成广义速度q‘
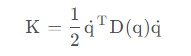
这里D为惯性矩阵
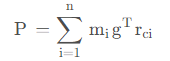
2. 其中P通过广义坐标描述
最后得到机械臂的欧拉-拉格朗日方程

其中
d为惯性项
c为离心力和科氏力
g为广义重力
参考:https://blog.csdn.net/qq_41342525/article/details/112577229

 浙公网安备 33010602011771号
浙公网安备 33010602011771号