
RK3568开发板SG90 舵机模块的功能实现-迅为电子
1 模块说明
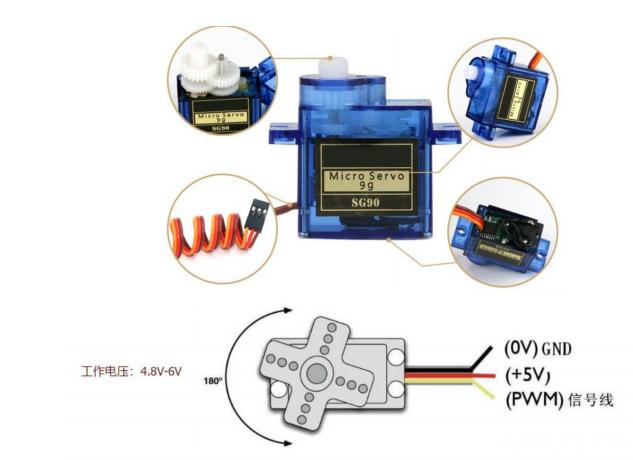
SG90 舵机模块如下图所示:
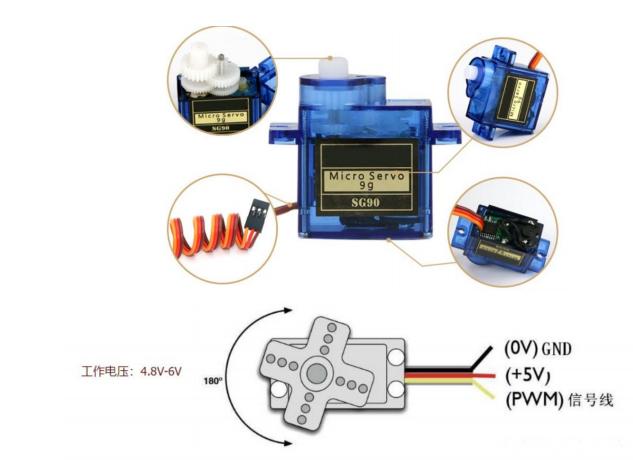
常见的舵机转向角度有 0-90 度,0-180 度,0-360 度,可以用在垃圾桶项目开盖用,智能小车的全比例转向,摄像头云台,机械臂等。
2 接线说明
SG90 舵机模块上三条线,三条线定义如下:
棕线:GND
红线:VCC 4.8V-7.2V
黄线:脉冲输入
3 程序测试
驱动模块在网盘资料“iTOP-3568 开发板\02_【iTOP-RK3568 开发板】开发资料\09_系统外设功能测试\06_V1.7 底版外设快速测试资料\13_SG90 舵机(90 度)模块\03_驱动模块”目录下下载。
首先将 pwm-SG90.ko 驱动模块拷贝到开发板的根目录,然后输入“insmod pwm-SG90.ko” 命令加载驱动模块, 然后使用命令“ls /dev/sg90”进行设备节点的查看,
然后下载网盘资料“iTOP-3568 开发板\02_【iTOP-RK3568 开发板】开发资料\09_系统外设功能测试\06_V1.7 底版外设快速测试资料\13_SG90 舵机(90 度)模块\04_测试程序”下的测试程序。将 sg90_test 可执行文件拷贝到开发板的根目录下如下图所示:
sg90 节点就是 SG90 舵机的设备节点文件,然后使用命令“./sg90_test 角度”运行 SG90 舵机模块的测试程序,
./sg90_test 90
./sg90_test 180
./sg90_test 45
会发现舵机会转相应的角度。
转自:【北京迅为】itop-3568开发板模块快速测试手册



【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· winform 绘制太阳,地球,月球 运作规律
· 震惊!C++程序真的从main开始吗?99%的程序员都答错了
· AI与.NET技术实操系列(五):向量存储与相似性搜索在 .NET 中的实现
· 【硬核科普】Trae如何「偷看」你的代码?零基础破解AI编程运行原理
· 超详细:普通电脑也行Windows部署deepseek R1训练数据并当服务器共享给他人
2017-09-20 [分享] IMX6嵌入式开发板linux QT挂载U盘及TF卡