手柄陀螺仪、加速度计算
一、基本概念
陀螺仪可选量程:± 15.6/31.2/62.5/125/250/500/1000/2000 dps
加速度可选量程:± 2/4/8/16 g
计算单位:
陀螺仪:角速度=速度*时间。单位:dps 度每秒。
加速度计:静止状态,重力加速度=1g≈9.8 米/平方秒。
表示:
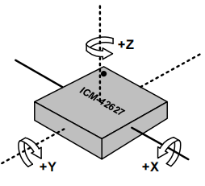
gx gy gz 代表陀螺仪在x,y,z轴上的分量
ax ay az 代表加速度计在x,y,z轴上的分量

二、传感器重要参数及物理量换算
陀螺仪和加速度的量程:以 2000 dps 和 16 g 为例
量程对应的精度:以 16.4 LSB 和 2048 LSB 为例
寄存器数据16位,最高位符号位,输出范围为-7FFF~7FFF,即-32767到32767
四轴姿态计算中,陀螺仪数据计算公式:
gyro_x / (16.40 * 1弧度) = gyro_x / (16.40 * 57.30) = gyro_x * 0.001064
加速度计算公式:
32737对应16g,32767/16≈2048,即灵敏度。
accel_x/2048 g ,1g=9.8 m2/s
物理量换算如下:

三、噪声滤波
互补滤波
Kalman滤波
数据融合滤波
四、姿态解算
姿态解算最小依赖:惯性传感器数据
只用加速度做姿态解算

横滚角φ=arctan(Ay/Az),代表重力加速度与X-Z平面的夹角
==>在三维空间,公式为:φ=arctan(Ay/sqrt(Ax2+Az2))

俯仰角:θ=arctan(-Ax/sqrt(Ay2+Az2))
只用陀螺仪做姿态解算
陀螺仪输出到姿态角速度的转换矩阵=[1, sin(phi)*tan(theta), cos(phi)*tan(theta);
0, cos(phi), -sin(phi);
0, sin(phi)*sec(theta), cos(phi)*sec(theta)];
平台:matlab,其中phi表示重力加速度与X-Z平面夹角,theta表示重力加速度与Y-Z平面夹角。
陀螺仪各轴输出为:gyro = [gx gy gz]' ;
姿态角速度算法:[横滚角速度,俯仰角速度,偏航角速度]' = trans * gryo;
姿态角(循环里累计角度变化):attitude_gyro = attitude_gyro + trans * gyro .* dt ;

 浙公网安备 33010602011771号
浙公网安备 33010602011771号